一种工业机器人复合夹具的制作方法
1.本实用新型涉及夹具技术领域,具体涉及一种工业机器人复合夹具。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置。现有技术中的工业机器人用复合夹具功能单一,尽管部分夹具能对多种尺寸的工件进行夹紧,但面对较大尺寸的工件时,如较大的面板类工件,无法完成夹紧,实用性较为一般。
3.公开号为cn209190791u的专利,公开了一种工业机器人复合夹具,它包括包括连接柱,连接柱的底部固定连接有夹具座,夹具座的底部开设有滑槽,滑槽的内部活动连接有滑块,夹具座的底部固定连接有气缸,气缸的输出端固定连接有活塞杆,且活塞杆的一端与滑块的一侧固定连接,滑块的数量为两个,且两个滑块的底部分别固定连接有第一固定杆和第二固定杆,第一固定杆的一侧通过固定螺栓固定连接有固定块,固定块的一侧开设有活动槽,活动槽的内部活动连接有限位块,限位块的一侧固定连接有活动杆,活动杆的表面活动套接有伸缩弹簧,活动杆远离限位块的一端固定连接有夹板。但该装置存在无法对较大尺寸工件夹紧的问题。为此,我们提出了一种工业机器人复合夹具。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种工业机器人复合夹具,克服了现有技术的不足,设计合理,结构紧凑,有效的解决了上述背景中提及的问题。
6.(二)技术方案
7.为实现以上目的,本实用新型通过以下技术方案予以实现:一种工业机器人复合夹具,包括底端不封闭的壳体和固定于壳体顶端的连接块,壳体的两端均开设有缺口,且壳体的顶端开设有通口,壳体的顶壁固定有液压杆,液压杆的伸缩端固定有移动块,移动块的下部开设有空腔,空腔的底壁连通安装有吸盘,且空腔的顶壁连通有总管道,总管道的另一端穿过通口并连通安装有真空发生器,真空发生器与壳体固定,壳体内壁对应移动块的两侧位置对称转动连接有呈前后向的转轴,两个转轴的外壁中部均套固定有齿轮,两个齿轮的内端均啮合有齿板,两个齿板均与移动块的外端固定,两个转轴的外壁均套设固定有夹杆。
8.优选的,总管道包括连接管一、软管和连接管二,连接管一的一端与空腔的顶壁连通,且连接管一的另一端与软管连通,软管的另一端穿过通口并与连接管二连通,连接管二的另一端与真空发生器连通。
9.优选的,液压杆设置有两个,两个液压杆的顶端均与壳体的顶壁固定,且两个液压杆的伸缩端均与移动块的顶端固定。
10.优选的,吸盘设置有多个。
11.优选的,每个转轴外壁上的夹杆设置有两个,两个夹杆分别位于齿轮的前后两侧。
12.优选的,同一个转轴上的两个夹杆之间固定有支撑柱。
13.优选的,夹杆内凹部位固定有软垫。
14.(三)有益效果
15.本实用新型实施例提供了一种工业机器人复合夹具,具备以下有益效果:
16.1、通过加入夹杆、吸盘和真空发生器等,采用夹杆和吸盘相配合的方式,可对多种尺寸的工件予以夹紧,解决了传统夹具功能单一的问题,实用性较好;
17.2、通过加入齿轮、齿板和转轴,实现联动,设计合理,结构紧凑;
18.3、通过加入软垫,有效防止对被夹工件造成磨损。
附图说明
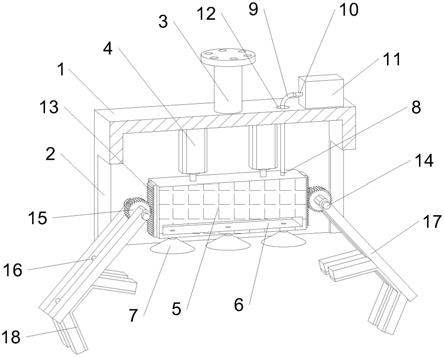
19.图1为本实用新型结构示意图;
20.图2为本实用新型另一视角结构示意图;
21.图3为本实用新型整体结构示意图。
22.图中:1-壳体、2-缺口、3-连接块、4-液压杆、5-移动块、6-空腔、7-吸盘、8-连接管一、9-软管、10-连接管二、11-真空发生器、12-通口、13-齿板、14-转轴、15-齿轮、16-支撑柱、17-夹杆、18-软垫。
具体实施方式
23.下面结合附图1-3和实施例对本实用新型进一步说明:
24.实施例1
25.本实施例中,如图所示1-3,一种工业机器人复合夹具,包括底端不封闭的壳体1和固定于壳体1顶端的连接块3,壳体1的两端均开设有缺口2,且壳体1的顶端开设有通口12,壳体1的顶壁固定有两个液压杆4,两个液压杆4的伸缩端固定有同一个移动块5,移动块5的下部开设有空腔6,空腔6的底壁连通安装有多个吸盘7,且空腔6的顶壁连通有总管道,总管道的另一端穿过通口12并连通安装有真空发生器11,真空发生器11与壳体1固定,总管道包括连接管一8、软管9和连接管二10,连接管一8的一端与空腔6的顶壁连通,且连接管一8的另一端与软管9连通,软管9的另一端穿过通口12并与连接管二10连通,连接管二10的另一端与真空发生器11连通。壳体1内壁对应移动块5的两侧位置对称转动连接有呈前后向的转轴14,两个转轴14的外壁中部均套固定有齿轮15,两个齿轮15的内端均啮合有齿板13,两个齿板13均与移动块5的外端固定,两个转轴14的外壁均套设固定有夹杆17。
26.实施例2
27.在实施例1的基础上,每个转轴14外壁上的夹杆17设置有两个,两个夹杆17分别位于齿轮15的前后两侧。同一个转轴14上的两个夹杆17之间固定有支撑柱16,用以提高了两个夹杆17之间的稳定性。夹杆17内凹部位固定有软垫18,避免对被夹工件造成磨损。
28.上述实施例1-2提出的工业机器人复合夹具,在使用时,启动液压杆4,带动移动块5上移,继而带动两侧的齿板13上移,从而带动两侧的齿轮15转动,两侧的转轴14随之转动,带动两侧的夹杆17同时向内转动,对工件予以夹紧;当所夹工件的尺寸较大,夹杆17不能对其进行夹紧时,控制液压杆4,带动移动块5下移,通过齿板13、齿轮15和转轴14的传动,带动两侧的夹杆17同时向外侧转动,同时,与空腔6连通的吸盘7下移与工件接触贴紧,启动真空
发生器11,实现对工件的真空吸附,解决了传统夹具功能单一的问题,实用性较好。
29.本申请中出现的电器元件均与外界的主控器及220v市电电连接,并且主控器可为计算机等起到控制的常规已知设备。
30.本实用新型的实施例公布的是较佳的实施例,但并不局限于此,本领域的普通技术人员,极易根据上述实施例,领会本实用新型的精神,并做出不同的引申和变化,但只要不脱离本实用新型的精神,都在本实用新型的保护范围内。
技术特征:
1.一种工业机器人复合夹具,包括底端不封闭的壳体(1)和固定于壳体(1)顶端的连接块(3),其特征在于:壳体(1)的两端均开设有缺口(2),且壳体(1)的顶端开设有通口(12),壳体(1)的顶壁固定有液压杆(4),液压杆(4)的伸缩端固定有移动块(5),移动块(5)的下部开设有空腔(6),空腔(6)的底壁连通安装有吸盘(7),且空腔(6)的顶壁连通有总管道,总管道的另一端穿过通口(12)并连通安装有真空发生器(11),真空发生器(11)与壳体(1)固定,壳体(1)内壁对应移动块(5)的两侧位置对称转动连接有呈前后向的转轴(14),两个转轴(14)的外壁中部均套固定有齿轮(15),两个齿轮(15)的内端均啮合有齿板(13),两个齿板(13)均与移动块(5)的外端固定,两个转轴(14)的外壁均套设固定有夹杆(17)。2.根据权利要求1所述的一种工业机器人复合夹具,其特征在于:总管道包括连接管一(8)、软管(9)和连接管二(10),连接管一(8)的一端与空腔(6)的顶壁连通,且连接管一(8)的另一端与软管(9)连通,软管(9)的另一端穿过通口(12)并与连接管二(10)连通,连接管二(10)的另一端与真空发生器(11)连通。3.根据权利要求1所述的一种工业机器人复合夹具,其特征在于:液压杆(4)设置有两个,两个液压杆(4)的顶端均与壳体(1)的顶壁固定,且两个液压杆(4)的伸缩端均与移动块(5)的顶端固定。4.根据权利要求1所述的一种工业机器人复合夹具,其特征在于:吸盘(7)设置有多个。5.根据权利要求1所述的一种工业机器人复合夹具,其特征在于:每个转轴(14) 外壁上的夹杆(17)设置有两个,两个夹杆(17)分别位于齿轮(15)的前后两侧。6.根据权利要求5所述的一种工业机器人复合夹具,其特征在于:同一个转轴(14)上的两个夹杆(17)之间固定有支撑柱(16)。7.根据权利要求1所述的一种工业机器人复合夹具,其特征在于:夹杆(17)内凹部位固定有软垫(18)。
技术总结
本实用新型涉及夹具领域,具体涉及一种工业机器人复合夹具,包括壳体和连接块,壳体的两端均开设有缺口,且壳体的顶端开设有通口,壳体的顶壁固定有液压杆,液压杆的伸缩端固定有移动块,移动块的下部开设有空腔,空腔的底壁连通安装有吸盘,且空腔的顶壁连通有总管道,总管道的另一端穿过通口并连通安装有真空发生器,壳体内壁对称转动连接有转轴,两个转轴的外壁中部均套固定有齿轮,两个齿轮的内端均啮合有齿板,两个齿板均与移动块的外端固定,两个转轴的外壁均套设固定有夹杆;本实用新型通过加入夹杆、吸盘和真空发生器等,采用夹杆和吸盘相配合的方式,可对多种尺寸的工件予以夹紧,解决了传统夹具功能单一的问题,实用性较好。用性较好。用性较好。
技术研发人员:赵建军 吴松如 孙正新 朱家俊 郑有松 李福春 张本林 董俊杰 张成玉 王子科 王子祥 张童
受保护的技术使用者:安徽瑞莱尔仪表有限公司
技术研发日:2021.08.23
技术公布日:2022/2/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1