一种钻孔机器人的制作方法
1.本实用新型涉及机械技术领域,尤其涉及一种钻孔机器人。
背景技术:
2.在地铁机电安装及装修施工中,对地铁站站厅公共区内根据图纸进行钻孔时,通常采用搭设脚手架,作业人员用电锤钻孔,由于对地铁站站厅公共区内一般具有大量的孔洞,因此需要多次转场搭设和安装脚手架,同时地铁站内施工环境相对复杂,尤其是超过5米的高空作业安全风险大,消耗大量的人工和时间。目前地铁站站厅施工时采用人工钻孔的方式存在安全风险高且效率较低的问题。
技术实现要素:
3.本实用新型提供了一种钻孔机器人,用以解决高空人工钻孔存在安全风险高且效率较低的技术问题。
4.为实现上述目的,本实用新型提供了一种钻孔机器人,包括自动行走装置、自动定位装置、自动升降装置和钻孔集尘装置,所述自动定位装置固定于所述自动行走装置上,用于自动定位所述自动行走装置,所述自动升降装置的一端固定连接所述自动行走装置,所述钻孔集尘装置安装于所述自动升降装置的另一端。
5.优选的,还包括钢筋探测装置,所述钢筋探测装置安装于所述钻孔集尘装置上,用于检测待钻孔区域钢筋的位置、直径、数量和走向。
6.优选的,所述钻孔集尘装置包括集尘盒和电钻,所述电钻安装于所述自动升降装置上,所述集尘盒安装于所述电钻上。
7.优选的,所述自动升降装置包括气动升降杆和空气压缩机,气动升降杆的顶端安装所述钻孔集尘装置,气动升降杆的进气阀连接所述空气压缩机,通过空气压缩机改变气动升降杆的气缸内的气压,从而使所述自动升降装置和所述钻孔集尘装置上升或下降。
8.优选的,所述自动定位装置具体为激光定位仪,所述激光定位仪通过与所述自动行走装置组合,实现对所述自动行走装置的自动定位。
9.优选的,所述自动行走装置具体为履带式行走机构。
10.本实用新型具有以下有益效果:本实用新型的一种钻孔机器人,通过自动定位装置实现了钻孔机器人的自动定位,通过钻孔集尘装置实现精准、正确的钻孔,不需要人工进行高空作业,大量降低了初期高空作业的安全风险,相较于人工钻孔的方式,可以极大的提高施工效率。
11.除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照附图,对本实用新型作进一步详细的说明。
附图说明
12.构成本申请的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的
示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
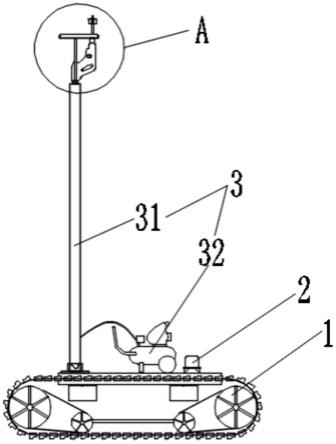
13.图1是本实用新型的钻孔机器人的结构示意图;
14.图2是图1中a的结构示意图;
15.其中,附图标记如下:
16.1、自动行走装置;2、自动定位装置;3、自动升降装置;31、升降杆;32、空气压缩机;4、钻孔集尘装置;41、集尘盒;42、电钻;5、钢筋探测装置。
具体实施方式
17.以下结合附图对本实用新型的实施例进行详细说明,但是本实用新型可以由权利要求限定和覆盖的多种不同方式实施。此外,除非另有定义,本申请描述中所使用的技术术语或者科学术语应当为本申请所属领域内一般技术人员所理解的通常含义。本申请描述中所使用的“上”、“下”、“左”、“右”、“中心”、“竖直”、“水平”、“内”、“外”等表示方位的词语仅用以表示相对的方向或者位置关系,而非暗示装置或元件必须具有特定的方位、以特定的方位构造和操作,当被描述对象的绝对位置发生改变后,其相对位置关系也可能发生相应的改变,因此不能理解为对本申请的限制。本申请描述中所使用的“第一”、“第二”、“第三”以及类似用语,仅用于描述目的,用以区分不同的组成部分,而不能够将其理解为指示或暗示相对重要性。本申请描述中所使用的“一个”、“一”或者“该”等类似词语,不应理解为对数量的绝对限制,而应理解为存在至少一个。本申请描述中所使用的“包括”或者“包含”等类似词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。
18.如图1和图2所示,本实施例的钻孔机器人,包括自动行走装置1、自动定位装置2、自动升降装置3和钻孔集尘装置4,自动定位装置2固定于自动行走装置1上,用于自动定位自动行走装置1,自动升降装置3的一端固定连接自动行走装置1,钻孔集尘装置4安装于自动升降装置3的另一端。
19.作为本实施例的优选实施方案,本实施例的钻孔机器人还包括钢筋探测装置5,钢筋探测装置5安装于钻孔集尘装置4上,用于检测待钻孔区域钢筋的位置、直径、数量和走向,可探测钻孔位置是否有钢筋,当有钢筋时挪动钻孔集尘装置4以避开钢筋避免破坏钢结构。
20.作为本实施例的优选实施方案,本实施例的钻孔集尘装置4包括集尘盒41和电钻42,电钻42安装于自动升降装置3上,集尘盒41安装于电钻42上,可以在钻孔的同时,使钻孔产生的灰尘落入集尘盒41中,具有良好的集尘和防尘效果。
21.作为本实施例的优选实施方案,本实施例的自动升降装置3包括气动升降杆31和空气压缩机32,气动升降杆31的顶部安装电钻42,气动升降杆31连接空气压缩机32,通过空气压缩机32的电机带动曲轴,曲轴联动活塞,当活塞从顶端往回抽时,使气动升降杆31的汽缸里形成负压,进而使空气压缩机32的进气阀片被吸开,空气进入,当活塞达到底端行程时,活塞开始往上端压缩,这个时候,进气阀片被气体的压力推动关闭,排气阀此时被气体压力打开,形成整个进气,压缩,排气整个过程,气动升降杆31的气缸内的气压改变使气动升降杆31上升或下降,进而带动电钻42上升或下降。
22.作为本实施例的优选实施方案,本实施例的自动定位装置2具体为激光定位仪,激光定位仪通过与自动行走装置1组合,通过三角定位实现对自动行走装置1的自动定位。
23.本实施例的钻孔机器人,自动行走装置1具体为履带式行走机构,用来支撑整个自动升降装置3的重量,并承受自动升降装置3和钻孔集尘装置4在作业过程中产生的作用力。
24.本实施例通过激光定位仪对自动行走装置1进行定位,使自动行走装置1移动到预设位置,然后通过自动升降装置3使电钻42和钢筋探测装置5上升,钢筋探测装置5检测到预设的钻孔位置没有钢筋时通过电钻42进行钻孔,并在钻孔过程中通过集尘盒41进行集尘,本实施例的钻孔方式不需要人工进行高空作业,大量降低了初期高空作业的安全风险,同时极大的提高了施工效率。
25.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种钻孔机器人,其特征在于,包括自动行走装置(1)、自动定位装置(2)、自动升降装置(3)、和钻孔集尘装置(4),所述自动定位装置(2)固定于所述自动行走装置(1)上,用于自动定位所述自动行走装置(1),所述自动升降装置(3)的一端固定连接所述自动行走装置(1),所述钻孔集尘装置(4)安装于所述自动升降装置(3)的另一端。2.根据权利要求1所述的一种钻孔机器人,其特征在于,还包括钢筋探测装置(5),所述钢筋探测装置(5)安装于所述钻孔集尘装置(4)上,用于检测待钻孔区域钢筋的位置、直径、数量和走向。3.根据权利要求1所述的一种钻孔机器人,其特征在于,所述钻孔集尘装置(4)包括集尘盒(41)和电钻(42),所述电钻(42)安装于所述自动升降装置(3)上,所述集尘盒(41)安装于所述电钻(42)上。4.根据权利要求1所述的一种钻孔机器人,其特征在于,所述自动升降装置(3)包括气动升降杆(31)和空气压缩机(32),气动升降杆(31)的顶端安装所述钻孔集尘装置(4),气动升降杆(31)的进气阀连接所述空气压缩机(32),通过空气压缩机(32)改变气动升降杆(31)的气缸内的气压,从而使所述自动升降装置(3)和所述钻孔集尘装置(4)上升或下降。5.根据权利要求1所述的一种钻孔机器人,其特征在于,所述自动定位装置(2)具体为激光定位仪,所述激光定位仪通过与所述自动行走装置(1)组合,实现对所述自动行走装置(1)的自动定位。6.根据权利要求1所述的一种钻孔机器人,其特征在于,所述自动行走装置(1)具体为履带式行走机构。
技术总结
本实用新型公开了一种钻孔机器人,包括自动行走装置、自动定位装置、自动升降装置和钻孔集尘装置,所述自动定位装置固定于所述自动行走装置上,用于自动定位所述自动行走装置,所述自动升降装置的一端固定连接所述自动行走装置,所述钻孔集尘装置安装于所述自动升降装置的另一端。本实用新型的一种钻孔机器人,通过自动定位装置实现了钻孔机器人的自动定位,通过钻孔集尘装置实现精准、正确的钻孔,不需要人工进行高空作业,大量降低了初期高空作业的安全风险,相较于人工钻孔的方式,可以极大的提高施工效率。大的提高施工效率。大的提高施工效率。
技术研发人员:左佳鑫 陈曙泽 李龙达 郑浩 彭鹏程 薛凯文
受保护的技术使用者:五矿二十三冶建设集团有限公司
技术研发日:2021.12.31
技术公布日:2022/7/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1