一种用于施工现场的火灾监控机器人的制作方法
1.本实用新型涉及一种土建施工监控装置,具体为一种用于施工现场的火灾监控机器人,属于机器人技术领域。
背景技术:
2.施工现场火灾风险大,因此对施工现场的巡检是每个工程类项目需要重复不断地进行的工作。在实际的施工项目中,往往存在施工场所分散、距离办公地点较远等一系列现实问题。如何通过先进的通信技术、视频技术、远程控制技术、传感技术和人工智能技术,解决时间、空间的难题,协助管理人员更高频、高效、精确的巡检,是有效提高管理效率、降低成该的刚性需求。
3.对于建成的火灾风险性高的建筑,在夜间或者无人值守时经常也需采用附加措施对于建筑物内的火灾报警或者消防灭火措施进行补充,且需要对现场进行监控。
技术实现要素:
4.针对现有技术中存在的上述不足之处,该机器人要解决的技术问题是提供一种用于施工现场的火灾监控机器人。
5.该实用新型通过以下技术方案来实现上述目的:一种用于施工现场的火灾监控机器人,包括固定及辅助移动结构、瞄准结构和喷射灭火结构,所述固定及辅助移动结构安装在该机器人的下方,且瞄准结构和喷射灭火结构安装在该机器人的内部;
6.所述固定及辅助移动结构由云台热成像摄像机、升降台、测距雷达、行走辅助摄像头、蜂鸣器、车体、底盘和升降杆构成,所述底盘安装在车体的下方,所述升降台转动连接在车体的上方,并通过升降杆连接有云台热成像摄像机,所述测距雷达安装在车体的内部前端,且行走辅助摄像头安装在测距雷达侧方,所述车体上还安装有蜂鸣器,所述车体在蜂鸣器的一侧设置有垫圈;
7.所述瞄准结构由前照明灯、侧照明灯、瞄准电动云台和红外热追踪瞄准器构成,所述前照明灯和侧照明灯分别安装在车体上表面的前端和侧面上,所述瞄准电动云台连接在灭火球发射筒前端,所述红外热追踪瞄准器安装在车体的一侧;
8.所述喷射灭火结构由电磁气嘴、压缩气体罐、电磁放球口、控制器、前盖电磁开启装置、活动前盖和调节夹构成,所述电磁气嘴和压缩气体罐固定在该灭火球发射筒的底端,所述活动前盖安装在车体正面上,所述前盖电磁开启装置连接在活动前盖和车体连接处,所述调节夹固定在灭火球发射筒外侧,并与控制器呈电性连接。
9.作为该实用新型再进一步的方案:所述车体在前进方向的一侧/顶部固定连接有照明灯,所述照明灯为led灯,为两个,分别设置在所述车体在前进方向的一侧/顶部的左右两边,且前照明灯和侧照明灯均与该机器人内部电源呈电性连接。
10.作为该实用新型再进一步的方案:所述灭火球发射筒为耐火材料的光滑暴壁筒,内径大于灭火球的直径。
11.作为该实用新型再进一步的方案:所述电磁气嘴与控制器呈电连接,所述电磁气嘴连接在压缩气体罐上,通过电磁铁的通(断)电,开启(关闭) 阀端的先导孔,使阀芯换向,实现被控流体介质的换向,所述压缩气体罐内储存有高压压缩气体。
12.作为该实用新型再进一步的方案:所述前盖电磁开启装置、活动前盖、红外热追踪瞄准器和灭火球发射筒的发射端均与控制器相连接,用于控制相关部件的打开和关闭。
13.作为该实用新型再进一步的方案:所述升降台的顶部通过电动升降杆连接云台热成像摄像机,所述电动升降杆连接控制器,两者之间呈电动连接。
14.该实用新型的有益效果是:该用于施工现场的火灾监控机器人设计合理:
15.1.该机器人能够稳定行走于施工现场的工况,实时监控以及时发现施工现场的火灾,并第一时间启动灭火工作并进行报警;
16.2.释放灭火球时的行走速度可通过云台热成像摄像机观察火焰的情况后确定,当火焰范围大,强度高时,采用高速,反之采用低速;
17.3.可以远程控制调节监控点,监控方向等其他操作,自动化程度较高。
附图说明
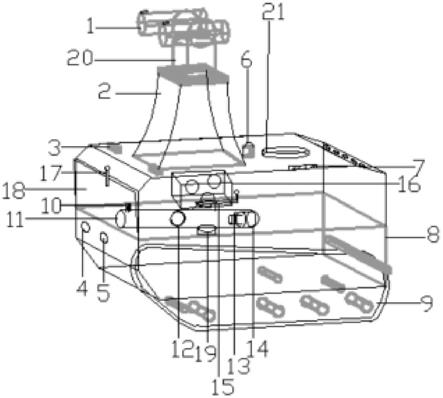
18.图1为该实用新型结构示意图。
19.图中:1、云台热成像摄像机,2、升降台,3、前照明灯,4、测距雷达,5、行走辅助摄像头,6、蜂鸣器,7、侧照明灯,8、车体,9、底盘, 10、瞄准电动云台,11、灭火球发射筒,12、红外热追踪瞄准器,13、电磁气嘴,14、压缩气体罐,15、电磁放球口,16、控制器,17、前盖电磁开启装置,18、活动前盖,19、调节夹,20、升降杆和21、垫圈。
具体实施方式
20.下面将结合该实用新型实施例中的附图,对该实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是该实用新型一部分实施例,而不是全部的实施例。基于该实用新型中的实施例,该领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于该实用新型保护的范围。
21.请参阅图1,一种用于施工现场的火灾监控机器人,包括固定及辅助移动结构、瞄准结构和喷射灭火结构,所述固定及辅助移动结构安装在该机器人的下方,且瞄准结构和喷射灭火结构安装在该机器人的内部;
22.所述固定及辅助移动结构由云台热成像摄像机1、升降台2、测距雷达 4、行走辅助摄像头5、蜂鸣器6、车体8、底盘9和升降杆20构成,所述底盘9安装在车体8的下方,所述升降台2转动连接在车体8的上方,并通过升降杆20连接有云台热成像摄像机1,所述测距雷达4安装在车体8的内部前端,且行走辅助摄像头5安装在测距雷达4侧方,所述车体8上还安装有蜂鸣器6,所述车体8在蜂鸣器6的一侧设置有垫圈21;
23.所述瞄准结构由前照明灯3、侧照明灯7、瞄准电动云台10和红外热追踪瞄准器12构成,所述前照明灯3和侧照明灯7分别安装在车体8上表面的前端和侧面上,所述瞄准电动云台10连接在灭火球发射筒11前端,所述红外热追踪瞄准器12安装在车体8的一侧;
24.所述喷射灭火结构由电磁气嘴13、压缩气体罐14、电磁放球口15、控制器16、前盖电磁开启装置17、活动前盖18和调节夹19构成,所述电磁气嘴13和压缩气体罐14固定在该
灭火球发射筒11的底端,所述活动前盖18 安装在车体8正面上,所述前盖电磁开启装置17连接在活动前盖18和车体 8连接处,所述调节夹19固定在灭火球发射筒11外侧,并与控制器16呈电性连接。
25.进一步的,在该实用新型实施例中,所述车体8在前进方向的一侧/顶部固定连接有照明灯,所述照明灯为led灯,为两个,分别设置在车体在前进方向的一侧/顶部的左右两边,且前照明灯3和侧照明灯7均与该机器人内部电源呈电性连接,方便在幽暗环境下进行监控,确保监控光环境的正常。
26.进一步的,在该实用新型实施例中,所述灭火球发射筒11为耐火材料的光滑暴壁筒,内径大于灭火球的直径,保证灭火球的正常发射,防止堵塞。
27.进一步的,在该实用新型实施例中,所述前盖电磁开启装置17、活动前盖18、红外热追踪瞄准器12和灭火球发射筒11的发射端均与控制器16相连接,用于控制相关部件的打开和关闭,方便远程控制。
28.进一步的,在该实用新型实施例中,所述升降台2的顶部通过电动升降杆20连接云台热成像摄像机1,所述电动升降杆20连接控制器16,两者之间呈电动连接,保证该云台热成像摄像机1的自由升降,方便调节观察点。
29.工作原理:在使用该用于施工现场的火灾监控机器人时,通过后台服务器进行远程操控,通过控制器16控制升降台2、云台热成像摄像机1、瞄准电动云台10、电磁放球口15、发射装置和红外热追踪瞄准装器12,在云台热成像摄像机1捕捉到火焰信号时,启动红外热追踪瞄准器12和瞄准电动云台10将灭火球发射筒11的对准方向调整为火焰方向,并启动发射装置进行发射,在发射后的预设时间内控制电磁放球口15打开,还用于控制所述升降台2的升降。
30.此外,应当理解,虽然该说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,该领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成该领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1