一种多功能轮式消防机器人
1.本实用新型涉及消防设备技术领域,尤其涉及一种多功能轮式消防机器人。
背景技术:
2.现有的消防机器人体型较大,大都无法进入居民楼房内;机器人在高温情况下会影响到其正常运作;消防人员只能通过摄像头了解部分现场情况,不能具体知道被困人员的所在位置,无法全面了解火灾现场结构来考虑具体的营救方案。
技术实现要素:
3.本实用新型的目的是为了克服以上现有技术存在的不足,提供了一种多功能轮式消防机器人。
4.本实用新型的目的通过以下的技术方案实现:一种多功能轮式消防机器人,包括外壳、悬挂车架、转向机构、驱动机构、水炮机构、检测机构、散热机构、多个第一车轮、多个第二车轮、控制器和电池,所述外壳安装于悬挂车架的顶部,多个所述第一车轮和多个第二车轮分别安装于悬挂车架的两侧,所述转向机构和驱动机构均安装于悬挂车架的安装槽,多个所述第一车轮和多个第二车轮均与转向机构连接,所述转向机构与驱动机构连接,所述散热机构安装于外壳的内部,所述水炮机构与检测机构均安装于外壳的顶部,所述转向机构、驱动机构、水炮机构、检测机构、散热机构和电池均与控制器连接。
5.更优的选择,所述转向机构包括转向电机、连杆、多个同步轴、多个第一锥齿、多个第二锥齿和多个第三锥齿,多个所述第一锥齿分别通过第一转轴安装于安装槽的一侧,多个所述第二锥齿分别通过第二转轴安装于安装槽的另一侧,多个所述第一车轮分别与第一转轴连接,多个所述第二车轮分别与第二转轴连接,所述转向电机安装于安装槽,所述转向电机通过连杆分别与多个所述同步轴和多个第三锥齿连接,多个所述第一锥齿和多个第二锥齿均与多个同步轴相匹配,多个所述第一锥齿和多个第二锥齿均与多个第三锥齿相匹配,所述驱动机构与第二转轴连接,所述转向电机与控制器连接。
6.更优的选择,所述连杆包括多个轴安装环、拉伸杆、多个锥齿承托架和连接杆,所述连接杆安装于安装槽,所述连接杆的一面与拉伸杆连接,所述拉伸杆与转向电机连接,多个所述锥齿承托架沿轴向设置于连接杆的另一面,多个所述第三锥齿安装于多个锥齿承托架,多个所述轴安装环沿轴向设置于连接杆的顶部,多个所述同步轴安装于多个轴安装环。
7.更优的选择,所述水炮机构包括喷头、转向器、水炮云台、高压水泵、进水管和出水管,所述进水管安装于外壳,所述进水管与高压水泵的进水口连接,所述高压水泵的出水口通过出水管与转向器连接,所述喷头安装于转向器,所述水炮云台安装于高压水泵的顶部,所述水炮云台、转向器和高压水泵均与控制器连接。
8.更优的选择,所述检测机构包括生命探测仪、三维扫描仪、调节电机、编码器和液压升降柱,生命探测仪和三维扫描仪均通过调节电机安装于液压升降柱,编码器安装于调节电机,所述液压升降柱安装于外壳的顶部,所述生命探测仪、三维扫描仪、调节电机、编码
器和液压升降柱均与控制器连接。更优的选择,所述散热机构包括冷水泵和散热管,所述散热管安装于外壳的内部,所述冷水泵安装于悬挂车架,所述散热管与冷水泵连接,所述冷水泵与控制器连接。
9.更优的选择,所述驱动机构包括驱动电机和同步带,所述驱动电机安装于安装槽,所述驱动电机通过同步带与转向机构连接,所述驱动电机与控制器连接。
10.更优的选择,还包括车灯和避障仪,所述车灯和避障仪均安装于悬挂车架,所述车灯和避障仪均与控制器连接。
11.本实用新型相对现有技术具有以下优点及有益效果:
12.1、本实用新型通过外壳、悬挂车架、转向机构、驱动机构、水炮机构、检测机构、散热机构、多个第一车轮、多个第二车轮、控制器和电池,悬挂车架采用防水设计,防水等级ip67,悬挂车架的底盘高度超高,具有超强的爬坡、越障能力;通过检测机构检测被困人员的位置和现场三维建筑建立,实现自动搜救被困人员;通过散热机构可以保护机器人内部的电子元件,避免温度过高影响其运作;通过转向机构在狭窄地方实现原地转向,通过水炮机构可以向不同角度喷射高压水体并且消防人员远程可以观察现场灭火效果,从而实现机器人代替消防人员救火和救火人员的灭火救援的能力。
13.2、本实用新型通过转向电机、连杆、多个同步轴、多个第一锥齿、多个第二锥齿和多个第三锥齿,第一车轮和第二车轮作相对的正向转动或者反向转动的切换,从而实现原地转弯的效果,并且减少了电机的数量,从而降低了生产成本。
14.3、本实用新型通过喷头、转向器、水炮云台、高压水泵、进水管和出水管,集细水雾式喷射模式、高流动式喷射模式以及远距离单投喷射模式于一体;喷头可以将高压水体转换成雾状小液滴,可使水障或者厚水层直接作用于需要冷却的燃烧物上,达到高效冷却的目的,可以有效保证在火场中灭火以及稀释粉尘、有毒气体;高压水泵提高了高压水体的喷射距离,实现远程灭火,转向器可以让高压水体从不同角度对发生火灾的地方进行喷射,消防人员可以通过水炮云台远程观察灭火的效果,从而达到最佳的灭火效果。
15.4、本实用新型通过生命探测仪、三维扫描仪、调节电机、编码器和液压升降柱,可以从不同高度和角度扫描现场环境,生命探测仪能够对火灾被困人员进行搜查,三维扫描仪将实际环境转换为虚拟环境,为机器人规划路线。
附图说明
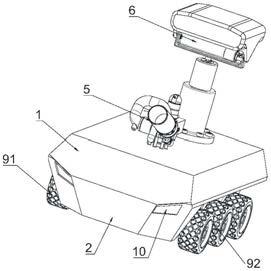
16.图1是本实用新型一种多功能轮式消防机器人的示意图;
17.图2是本实用新型一种多功能轮式消防机器人的示意图;
18.图3是本实用新型一种多功能轮式消防机器人的悬挂车架俯视图;
19.图4是本实用新型一种多功能轮式消防机器人的转向机构和驱动机构连接示意图;
20.图5是本实用新型一种多功能轮式消防机器人的转向机构和驱动机构示意图;
21.图6是本实用新型一种多功能轮式消防机器人的转向机构和驱动机构前视图;
22.图7是本实用新型一种多功能轮式消防机器人的水炮机构的示意图;
23.图8是本实用新型一种多功能轮式消防机器人的检测机构的示意图;
24.图9是本实用新型一种多功能轮式消防机器人的散热机构的示意图;
25.图10是本实用新型一种多功能轮式消防机器人的外壳连接示意图;
26.图11是本实用新型一种多功能轮式消防机器人的连杆连接示意图;
27.附图中各部件的标记:1、外壳;2、悬挂车架;21、悬架;3、转向机构; 31、转向电机;32、连杆;321、轴安装环;322、拉伸杆;323、锥齿承托架;324、凸台;325、连接杆;33、同步轴;34、第一锥齿;35、第二锥齿;36、第三锥齿;37、第一转轴;38、第二转轴;4、驱动机构;41、驱动电机;42、同步带;5、水炮机构;51、喷头;52、转向器;53、水炮云台;54、高压水泵;55、进水管;56、出水管;6、检测机构;61、扫描仪;62、调节电机;63、液压升降柱;7、散热机构;71、冷水泵;72、散热管;8、电池;91、第一车轮; 92、第二车轮;10、车灯和避障仪。
具体实施方式
28.下面结合附图和具体实施例对本实用新型的发明目的作进一步详细地描述, 实施例不能在此一一赘述,但本实用新型的实施方式并不因此限定于以下实施例。
29.一种多功能轮式消防机器人,包括外壳1、悬挂车架2、转向机构3、驱动机构4、水炮机构5、检测机构6、散热机构7、3个第一车轮91、3个第二车轮92、控制器、避障仪10、车灯10和电池8,散热机构7的散热管72安装在外壳1的内部,外壳1安装在悬挂车架2的顶部,散热机构7的冷水泵71安装在悬挂车架2的安装槽,3个第一车轮91与悬挂车架2左侧的悬架21连接,3个第二车轮92与悬挂车架2右侧的悬架21连接,转向机构3和驱动机构4均安装在悬挂车架2的安装槽内,3个第一车轮91和3个第二车轮92分别通过传动轴与转向机构3的两侧连接,驱动机构4与转向机构3连接。检测机构6和水炮机构5均安装在外壳1的顶部,两个避障仪10和两个车灯10对称地安装在悬挂车架2的前端两侧。转向机构3、驱动机构4、水炮机构5、检测机构6、散热机构7、避障仪10、车灯10和电池8均与控制器连接。
30.外壳1用于保护内部零件并起到支架作用,用于安装水炮机构5和检测机构 6。悬挂车架2起到避震的作用,并用于安装驱动机构4和转向机构3。转向机构 3用于让机器人原地转弯,驱动机构4为机器人前后移动和原地转弯提供动力支持。水炮机构5集细水雾式喷射模式、高流动式喷射模式以及远距离单投喷射模式于一体,可以让水体加压然后射出,并可以调节水体喷出的角度。检测机构6 用于检测现场环境,将现实环境转换为三维引导机器人走向和扫描定位生命体所在位置。散热机构7通过循环冷却水来让外壳1的温度降低。第一车轮91和第二车轮92可以实现同向前进、后退、顺时针转弯和逆时针转弯。控制器为单片机,为机器人的控制中心,可以调动协调各个零部件之间的动作,也可以接收使用者的指令。避障仪10用于机器人检测前方是否存在障碍物;车灯10与避障仪 10为一体制造而成,可以为机械人提供良好的照明环境。电池8为大容量防爆电池8,达到最高防爆等级,并使用具有防爆电池管理系统,为机器人所有的电子元件提供动力。
31.转向机构3包括转向电机31、连杆32、3个同步轴33、3个第一锥齿34、3 个第二锥齿35和3个第三锥齿36,悬挂车架2内部设有安装槽,3个第一锥齿 34通过第一转轴37依次安装在安装槽的左侧,3个第二锥齿35通过第二转轴38 依次安装在安装槽的右侧,第一转轴37和第二转轴38一一对应。3个第一转轴 37通过传动轴分别与3个第一车轮91连接。3个第二转轴38的一端通过传动轴分别与3个第二车轮92连接,3个第二转轴38的另一端分别与3个驱动机构4 的同步带42连接。连杆32包括3个轴安装环321、拉伸杆322、3个锥齿承托架 323和连接杆325,连接杆325的一面与拉伸杆322连接,3个锥齿承托架323 沿轴向均匀分布
在连接杆325的另一面,每个锥齿承托架323的端部分别设有1 个凸台324,3个轴安装环321沿轴向均匀分布在连接杆325的顶部。连接杆325 安装在悬挂车架2安装槽的底部,3个第三锥齿36安装在锥齿承托架323上,第三锥齿36左右定位,锥齿承托架323作相对于第三锥齿36的左右滑动,当第三锥齿36滑到凸台324上时,凸台324将第三锥齿抬升,从而实现第三锥齿36在锥齿承托架323上上下移动,第三锥齿36位于第一锥齿34和第二锥齿35之间的下方,第三锥齿36分别与第一锥齿34和第二锥齿35相匹配。3个同步轴33 分别安装在轴安装环321上,3个同步轴33的两端均设有齿轮,两个齿轮分别与第一锥齿34和第二锥齿35相匹配,实现第一锥齿34和第二锥齿35传动的作用。转向电机31受到控制器的控制,可以控制其正向转动或者反向转动,实现机器人的直行或者原地转弯。
32.转向电机31为切换第一车轮91和第二车轮92的转向提供动力。连杆32用于带动3个第三锥齿36升高或者降低,并同时带动3个同步轴33左右移动。当同步轴33向右移动到最大值,同步轴33分别与第一锥齿34和第二锥齿35连接,起到传动作用,同步轴33向左移动到最大值,同步轴33与第一锥齿34和第二锥齿35错位脱开。当第三锥齿36被凸台324提升高度,第三锥齿36与第一锥齿34和第二锥齿35连接,起到传动作用。第一转轴37的作用是让第一锥齿34 安装在悬挂车架2上,并且通过传动轴带动第一车轮91转动。第二转轴38的作用将第二锥齿35安装在悬挂车架2上,并通过与驱动机构4连接,从而通过传动轴带动第二车轮92转动。轴安装环321用于安装同步轴33,并带动传动轴左右移动。拉伸杆322上设有板齿,转向电机31通过转动带动拉伸杆322左右移动。锥齿承托架323用于安装第三锥齿36,第三锥齿36可以在锥齿承托架323 上左右滑动,锥齿承托架323上的凸台324可以让第三锥齿36提升高度,从而实现第三锥齿36分别与第一锥齿34和第二锥齿35连接,实现传动功能。连接杆325用于伸缩杆分别与轴安装环321和锥齿承托架323的连接。
33.转向机构3的工作原理说明:当转向电机31正转时,连杆32向转向电机31 靠近,连杆32带动3个同步轴33向左移动,同步轴33上的齿轮与第一锥齿34 和第二锥齿35错位分开,同时移动到凸台324通过自身移动将第三锥齿36抬升,第三锥齿36同时与第一锥齿34和第二锥齿35连接,第二锥齿35通过第三锥齿 36带动第一锥齿34转动。第一锥齿34通过传动轴带动第一车轮91转动,第二锥齿35通过传动轴带动第二车轮92转动,3个第一车轮91和3个第二车轮92 作相对反向转动,实现机器人原地顺时针或者逆时针转向。当转向电机31反转时,转动电机31让连杆32向外推开,连杆32带动3个同步轴33上的齿轮分别与第一锥齿34和第二锥齿35靠近并切合连接,从而实现第二锥齿35通过同步轴33带动第一锥齿34转动,同时第三锥齿36脱离凸台324,因而自身下降导致与第一锥齿34和第二锥齿35脱离分开,第一锥齿34通过传动轴带动第一车轮 91转动,第二锥齿35通过传动轴带动第二车轮92转动,第一车轮91与第二车轮92实现同向转动,从而实现机器人前进后者后退。
34.驱动机构4包括驱动电机41和同步带42,驱动电机41安装在悬挂车架2 的安装槽内,驱动电机41通过同步带42与转向机构3的第二转轴38连接,驱动电机41与控制器连接。驱动电机41为机器人提供动力,同步带42用于将驱动电机41带动第二转轴38转动。
35.水炮机构5包括喷头51、转向器52、水炮云台53、高压水泵54、进水管55 和出水管56,进水管55的一端从悬挂车架2的后端穿出,进水管55的另一端安装在外壳1的顶部探出,进水管55的出水端与高压水泵54的进水口连接,高压水泵54的出水口通过出水管56与转向器52连接,喷头51安装于转向器52,水炮云台53安装于高压水泵54的顶部,水炮云台53、转
向器52和高压水泵54 均与控制器连接。喷头51可以分散水体提高灭火的效果,转向器52可以调节喷头51的角度,让高压水体从不同角度喷出。水炮云台53可以水平方向和垂直方向转动,摄像头为360
°
全景摄像头,可以从各个角度观察喷水灭火的效果,并可以实现远程实时视频监控和无线传送图片。高压水泵54用于提高水体的水压。进水管55和出水管56用于输送水体。
36.检测机构6包括扫描仪61、调节电机62、编码器和液压升降柱63,扫描仪 61包括生命探测仪61和三维扫描仪61,生命探测仪61为红外生命探测仪61,红外生命探测仪61和三维扫描仪61均通过调节电机62安装在液压升降柱63的伸缩端,编码器安装在调节电机62上,液压升降柱63安装在外壳1的顶部,扫描仪61、调节电机62、编码器和液压升降柱63均与控制器连接。红外生命探测仪61的作用是借着感应人体所发出超低频电波产生的电场(由心脏产生)来找到被困人员的位置。三维扫描仪61用来侦测并分析现实世界中物体或环境的形状(几何构造)与外观数据(如颜色、表面反照率等性质)。搜集到的数据常被用来进行三维重建计算,在虚拟世界中创建实际物体的数字模型,用于引导机器人。编码器是一种将旋转位移转换成一串数字脉冲信号的旋转式传感器,这些脉冲能用来控制角位移。液压升降柱63调节扫描仪61的高度。
37.散热机构7包括冷水泵71和散热管72,散热管72嵌入在外壳1的内部,散热管72的出水端和进水端从外壳1的内部探出,并与冷水泵71连接,冷水泵71 安装于悬挂车架2,冷水泵71与控制器连接。冷水泵71让冷水循环流动;散热管72分布在外壳1的内部,通过管内冷水循环从而达到给外壳1降温的作用,另外外壳1主要采用钛合金制作而成,可让机器人能够承受较高的温度。
38.上述具体实施方式为本实用新型的优选实施例,并不能对本实用新型进行限定,其他的任何未背离本实用新型的技术方案而所做的改变或其它等效的置换方式,都包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1