一种多模态智能灭火机器人及其使用方法
1.本发明涉及消防救援领域,具体涉及一种多模态智能灭火机器人及其使用方法。
背景技术:
2.我国每年因为火灾事故造成大量的人员伤亡和财产损失,在这种危险环境下,实施人员和财产抢救是一件十分危险且困难的事。随着机器人技术日渐成熟,通过结合智能网联技术和自动控制技术研发适应性广、可靠性强的灭火机器人,可以有效缓解消防员救援工作压力,减轻消防人员不必要伤亡。此外,利用灭火机器人高机动性,多参数实时监测,反应迅速的特性,不仅可以代替消防人员更高效地完成消防工作,还能在火情刚出现时迅速动作,将火灾扼杀在初期状态,避免产生进一步的损失。
3.目前,我国研制的多数灭火机器人尚存在一些缺点:(1)目前已知的灭火机器人中,大部分机器人并未搭载有相关传感器检测灾情现场情况,无法及时为消防人员提供实时、可靠的数据以进行灾情分析;(2)现有的灭火机器人模态单一,难以适应复杂多变的地形与环境,不能针对不同的环境情况采取灵活多变的抢险救灾方式和运动方式;(3)现有的灭火机器人存在结构复杂,运动速度慢的缺点;(4)现有的灭火机器人体型一般较大,不利于携带与行动,降低了机器人的适用性;(5)现有的灭火机器人大多数无法在灾情突发的时候自主启动,智能化、自动化程度较差。
技术实现要素:
4.本发明的目的在于提供一种多模态智能灭火机器人,该灭火机器人适用于建筑室内环境、工业园区厂房、高校实验室等多种火灾易发环境。事故发生时,可以监测寻找火灾发生地点,并迅速动作,进行救援抢险工作,防止火势进一步扩大;火势较大时,可以代替消防救援人员深入现场进行消防灭火工作,避免消防人员造成不必要的伤亡。
5.为实现上述目的,本发明采用了以下技术方案:包括壳体、飞行机构及行走机构,所述壳体的表面安装有雷达、天线及高清耐高温摄像头,所述壳体的内部设有烟雾浓度传感器、温度传感器、mini主机及电池;所述的飞行机构包括对称设置在壳体左右两侧的机翼组件,所述的机翼组件通过旋转关节与壳体连接,所述的机翼组件包括螺旋桨及驱动螺旋桨转动的第一驱动电机;所述的行走机构包括与壳体底部相连的底盘以及对称设置在底盘左右两侧的左履带组件及右履带组件,所述的左履带组件及右履带组件均分别包括驱动轮、与驱动轮啮合且包裹在驱动轮外部的履带以及驱使驱动轮转动的第二驱动电机,所述底盘的内部还设有灭火器及控制第二驱动电机的底盘电路板,所述灭火器的喷射口悬伸于底盘的前部;所述的电池为天线、雷达、烟雾浓度传感器、温度传感器、高清耐高温摄像头、mini
主机、第一驱动电机、第二驱动电机供电;所述的mini主机包括处理器以及分别与处理器双向通讯的电机驱动模块、传感器信息采集模块、飞行器模块,还包括与处理器单向通讯的灭火器模块,所述的雷达、温度传感器、烟雾浓度传感器、高清耐高温摄像头及天线均分别与传感器信息采集模块双向通讯,所述天线的输入端与遥控器相连,所述电机驱动模块的输出端与底盘电路板相连,底盘电路板与第二驱动电机相连,第二驱动电机驱使驱动轮转动;所述飞行器模块的输出端与第一驱动电机相连,第一驱动电机驱使螺旋桨转动;所述的灭火器模块与灭火器相连。
6.所述的壳体为层状结构,包括上层的第一壳体及下层的第二壳体,所述的第一壳体及第二壳体的顶端均为敞口状,且第一壳体的顶端敞口处设有与之密闭的上盖,所述上盖的上表面设有用于安装雷达的雷达底座,所述的上盖上还设有与第一壳体内部连通的第一透风孔及第二透风孔,所述的第一透风孔为弧形孔,第二透风孔为正多边形孔。
7.所述第一壳体的头部设有高清耐高温摄像头,所述第一壳体的尾部设有天线,所述第一壳体的底板上设有烟雾浓度传感器及温度传感器,第一壳体的底板上还设有与第二壳体内部连通的第一通孔,所述的上盖与第一壳体通过螺钉连接。
8.所述第二壳体的底板上设有mini主机及用于安装电池的电池支架,第二壳体的前端设有电池盖板,第二壳体的底板上还设有与底盘内部连通的第二通孔,所述第二壳体的左右两侧分别对称设有与机翼组件相连的第一支翼,所述的第二壳体与第一壳体通过螺钉连接。
9.所述的机翼组件包括机翼外壳、螺旋桨、设置在机翼外壳内的第一驱动电机、与机翼外壳固连的第二支翼,所述的第二支翼与第一支翼通过旋转关节转动连接,所述的第一驱动电机通过齿轮组将动力传递给螺旋桨,所述的齿轮组包括相啮合的主动齿轮与从动齿轮,所述的主动齿轮与第一驱动电机的输出轴连接,所述的从动齿轮上设有六角棱柱,所述的螺旋桨上设有与六角棱柱相配合的内六角孔,所述的机翼组件共设置四组。
10.所述的底盘为截面呈梯形的六面体结构,所述底盘的顶板与第二壳体的下表面焊接固定,且底盘的顶板上还设有与第二通孔同心设置的第三通孔。
11.所述的灭火器设置在底盘内部的中间位置,灭火器的喷射口贯穿底盘的前板且呈悬伸状设置在底盘外部。
12.所述的左履带组件及右履带组件中的驱动轮及第二驱动电机均分别设置三个,所述的第二驱动电机分别通过电机支架固定在底盘左板或底盘右板的内表面,所述的左履带组件及右履带组件还分别包括履带盖板,所述的履带盖板通过卡扣固定安装在左履带组件或右履带组件的外侧。
13.由上述技术方案可知,本发明的飞行机构可以通过mini主机控制机翼组件的展开与收缩,调整机器人所处的运动模式,内部的温度传感器及烟雾浓度传感器可针对环境温度、烟雾浓度以及现场情况做出监测;本发明的行走机构可通过底盘电路板控制第二驱动电机和驱动轮的功率及转速,从而调整机器人前进的方向和速度,底盘内置的灭火器可以有效针对火源点对点灭火。本发明利用设计灭火机器人高机动性、多参数实时监测、反应迅速的特性,不仅可以代替消防人员更高效地完成消防工作,还能在火情刚出现时迅速动作,将火灾扼杀在初期状态,避免产生进一步的损失。
14.本发明的另一目的在于提供一种多模态智能灭火机器人的使用方法,包括如下步
骤:步骤1:智能灭火机器人多模态唤醒;步骤2:选择运动模式;步骤3:运动转向与智能避障;步骤4:火源定位及智能灭火。
15.所述的步骤1包括:步骤1.1:利用远程遥控器控制按钮将起动信息给予天线,信息将从导线以电信号的形式传达至mini主机内置处理器,并向电机驱动模块、传感器信息采集模块、飞行器模块、灭火器模块输出信号,对休眠模式的智能灭火机器人完成主动唤醒;步骤1.2:烟雾浓度传感器、温度传感器实时监测环境温度与烟雾浓度,并将数值与mini主机设定的温度、烟雾浓度上限值进行比对,当环境温度或烟雾浓度超过了mini主机设定的温度、烟雾浓度上限值时,信息将从导线以电信号的形式传达至mini主机内置处理器,并向电机驱动模块、传感器信息采集模块、飞行器模块、灭火器模块输出信号,对休眠模式的智能灭火机器人完成被动唤醒;步骤1.3:智能灭火机器人唤醒后,可以激活传感器信息采集模块中的雷达和高清耐高温摄像头,分别对机器人集群的其余智能灭火机器人进行定位与图像检测并发送唤醒信号,其余智能灭火机器人接收到信号后将信息以电信号的形式传达至mini主机内置处理器,并向电机驱动模块、传感器信息采集模块、飞行器模块、灭火器模块输出信号,对机器人机群完成相互唤醒;所述的步骤2中,若为飞行模式,mini主机输出信号控制第二支翼围绕旋转关节旋转以伸展机翼,并控制第一驱动电机驱动螺旋桨以提供升力,完成飞行动作;若为行走模式,mini主机输出信号给底盘电路板控制第二驱动电机驱动驱动轮带动履带前进,完成行走动作;所述的步骤3包括:步骤3.1:利用传感器信息采集模块中的雷达和高清耐高温摄像头,通过红外温度探测和机器视觉技术对智能灭火机器人周围环境物体进行检测定位,并将采集到的障碍物位置传达至mini主机进行处理;步骤3.2:mini主机将信号通过天线将障碍物位置分享给机器人机群;步骤3.3:飞行模式下,mini主机根据障碍物位置控制四个第一驱动电机转速,从而改变螺旋桨升力,使智能灭火机器人机身发生侧倾以避开障碍物,通过控制左右两侧第一驱动电机转速也可以完成转向动作,原理同上;行走模式下,mini主机根据障碍物位置控制底盘电路板使六个第二驱动电机转速,当左右两侧转速不同时,智能灭火机器人将向转速较慢的一侧转向,通过这种方式智能灭火机器人还可以完成避障动作;所述的步骤4包括:步骤4.1:利用高清耐高温摄像头通过机器视觉技术对比分析现场残留物以及烟雾浓度传感器检测到的烟雾浓度变化情况,mini主机运算器可以大致判断火源位置,并控制运动机构靠近火源;步骤4.2:mini主机将雷达定位到的准确火源位置通过天线发送给就近消防站及安全管理平台;
步骤4.3:根据高清耐高温摄像头通过机器视觉技术判断的火源类型,mini主机控制灭火器以对应灭火材料对火源进行喷射灭火;步骤4.4:飞行模式下,mini主机根据火源与灭火器喷射口相对位置控制四个第一驱动电机转速,从而改变螺旋桨升力,微调智能灭火机器人飞行姿态,确保灭火器喷口对准火源喷射灭火材料,实现灭火;步骤4.5:当灭火器材料耗尽或烟雾浓度传感器、温度传感器检测到环境烟雾浓度与温度低于预设上限值,智能灭火机器人完成灭火任务,返回原位或设定位置。
16.由上述技术方案可知,该方法可以实现智能灭火机器人的多模态唤醒、运动模式的选择、运动转向与智能避障、火源定位及智能灭火。
附图说明
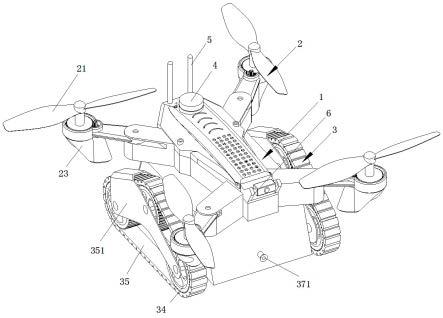
17.图1是本发明处于飞行模式时的结构示意图。
18.图2是本发明处于行走模式时的结构示意图。
19.图3是本发明的飞行机构与壳体结构的分解示意图。
20.图4是本发明上盖的结构示意图。
21.图5是本发明第一壳体的结构示意图。
22.图6是本发明第二壳体的结构示意图。
23.图7是本发明机翼组件的结构示意图。
24.图8是本发明机翼组件的内部结构示意图。
25.图9是本发明行走机构的结构示意图一。
26.图10是本发明行走机构的结构示意图二。
27.图11是本发明行走机构的分解示意图。
28.图12是本发明的原理框图。
29.上述附图中的标记为:壳体1、第一壳体11、第二壳体12、上盖13、雷达底座131、第一透风孔132、第二透风孔133、第一通孔14、电池支架15、电池盖板16、第二通孔17、第一支翼18、飞行机构2、螺旋桨21、第一驱动电机22、机翼外壳23、第二支翼24、主动齿轮25、从动齿轮26、行走机构3、底盘31、左履带组件32、右履带组件33、驱动轮34、履带35、履带盖板351、第二驱动电机36、电机支架361、灭火器37、喷射口371、底盘电路板38、第三通孔39、雷达4、天线5、高清耐高温摄像头6、烟雾浓度传感器7、温度传感器8、mini主机9、处理器91、电机驱动模块92、传感器信息采集模块93、飞行器模块94、灭火器模块95、电池10。
具体实施方式
30.下面结合附图对本发明做进一步说明:如图1、图2所示的一种多模态智能灭火机器人,包括壳体1、飞行机构2及行走机构3,壳体1的表面安装有雷达4、天线5及高清耐高温摄像头6,壳体1的内部设有烟雾浓度传感器7、温度传感器8、mini主机9及电池10。
31.具体的,如图3所示,壳体1为层状结构,包括上层的第一壳体11及下层的第二壳体12,第一壳体11及第二壳体12的顶端均为敞口状,且第一壳体11的顶端敞口处设有与之密闭的上盖13,如图4所示,上盖13的上表面设有用于安装雷达4的雷达底座131,上盖13上还
设有与第一壳体11内部连通的第一透风孔132及第二透风孔133,第一透风孔132为弧形孔,第二透风孔133为正多边形孔。雷达4可以精确获得机器人的位置,也可在避障时监测机器人周边的障碍物;第一透风孔132和第二透风孔133起到散热作用。
32.如图5所示,第一壳体11的头部设有高清耐高温摄像头6,高清耐高温摄像头6可以使机器人在高温环境下能够获得清晰的图像;第一壳体11的尾部设有天线5,第一壳体11的底板上设有烟雾浓度传感器7及温度传感器8,烟雾浓度传感器7及温度传感器8分别用于检测环境烟雾浓度以及温度;第一壳体11的底板上还设有与第二壳体12内部连通的第一通孔14,上盖13与第一壳体11通过螺钉连接。
33.如图6所示,第二壳体12的底板上设有mini主机9及用于安装电池10的电池支架15,第二壳体12的前端设有电池盖板16,第二壳体12的底板上还设有与底盘31内部连通的第二通孔17,第二壳体12的左右两侧分别对称设有与机翼组件相连的第一支翼18,第二壳体12与第一壳体11通过螺钉连接。
34.如图7、图8所示,飞行机构2包括对称设置在壳体1左右两侧的机翼组件,机翼组件通过旋转关节与壳体1连接,机翼组件包括螺旋桨21及驱动螺旋桨21转动的第一驱动电机22。
35.具体的,机翼组件包括机翼外壳23、螺旋桨21、设置在机翼外壳23内的第一驱动电机22、与机翼外壳23固连的第二支翼24,第二支翼24与第一支翼18通过旋转关节转动连接,即第二支翼24可以围绕旋转关节转动,实现机翼折叠动作;第一驱动电机22通过齿轮组将动力传递给螺旋桨21,齿轮组包括相啮合的主动齿轮25与从动齿轮26,主动齿轮25与第一驱动电机22的输出轴连接,从动齿轮26上设有六角棱柱,螺旋桨21上设有与六角棱柱相配合的内六角孔,机翼组件共设置四组。
36.当机翼组件展开时,灭火机器人处于飞行模式;当机翼组件折叠收缩时,灭火机器人处于行走模式或静止模式。机翼组件收缩时有利于减小机器人的占用空间,方便机器人存放或是通过狭小空间。
37.如图9、图10、图11所示,行走机构3包括与壳体1底部相连的底盘31以及对称设置在底盘31左右两侧的左履带组件32及右履带组件33,左履带组件32及右履带组件33均分别包括驱动轮34、与驱动轮34啮合且包裹在驱动轮34外部的履带35以及驱使驱动轮34转动的第二驱动电机36,底盘31的内部还设有灭火器37及底盘电路板38,灭火器37的喷射口371悬伸于底盘31的前部。
38.具体的,底盘31为截面呈梯形的六面体结构,底盘31的顶板与第二壳体12的下表面焊接固定,且底盘31的顶板上还设有与第二通孔17同心设置的第三通孔39。本实施例中,底盘31中的顶板、底板、左侧板、右侧板及前板为整体结构,底盘31中的后板通过螺钉固定在底盘31上,将底盘31的开口设置在后方有助于灭火器和第二驱动电机的安装,使机器人上部结构和下部结构一体化,整体结构更加紧凑。
39.灭火器37设置在底盘31内部的中间位置,灭火器37的喷射口371贯穿底盘31的前板且呈悬伸状设置在底盘31外部。灭火器37在mini主机的控制下可对火源进行灭火工作。
40.左履带组件32及右履带组件33中的驱动轮34及第二驱动电机36均分别设置三个,第二驱动电机36分别通过电机支架361固定在底盘左板或底盘右板的内表面,左履带组件32及右履带组件33还分别包括履带盖板351,履带盖板351通过卡扣固定安装在左履带组件
32或右履带组件33的外侧,对驱动轮34及履带35起固定保护作用。
41.如图12所示,电池为天线5、雷达4、烟雾浓度传感器7、温度传感器8、高清耐高温摄像头9、mini主机9、第一驱动电机22、第二驱动电机36供电。
42.mini主机9包括处理器91以及分别与处理器91双向通讯的电机驱动模块92、传感器信息采集模块93、飞行器模块94,还包括与处理器91单向通讯的灭火器模块95,雷达4、温度传感器8、烟雾浓度传感器7、高清耐高温摄像头6及天线5均分别与传感器信息采集模块93双向通讯,天线5的输入端与遥控器相连,电机驱动模块92的输出端与底盘电路板38相连,底盘电路板38与第二驱动电机36相连,第二驱动电机36驱使驱动轮34转动;飞行器模块94的输出端与第一驱动电机22相连,第一驱动电机22驱使螺旋桨21转动;灭火器模块95与灭火器37相连。
43.本发明的工作原理及工作过程如下:1、灭火机器在人的唤醒原理。
44.初始状态下,智能灭火机器人处于休眠模式,此模式下的烟雾浓度传感器及温度传感器始终处于监测状态。当险情发生时,首先需要对灭火机器人进行唤醒。唤醒方式包括如下:1)主动唤醒。工作人员通过摇控器输送信号给天线,天线将信号传递给mini主机的处理器,处理器向电机驱动模块、传感器信息采集模式、飞行器模块、灭火器模块输出信号,对休眠模式的机器人完成主动唤醒。2)被动唤醒。烟雾浓度传感器及温度传感器实时监测烟雾尝试与环境温度,并将数值与mini主机设定的温度及烟雾浓度的上限值进行比对,当环境温度或烟雾浓度超过了mini主机设定值的上限阈值时,信号将通过传感器信息采集模块发送至处理器,处理器再向电机驱动模块、传感器信息采集模式、飞行器模块、灭火器模块输出信号,对休眠模式的机器人完成被动唤醒。3)相互唤醒。火灾现场通常会设置多个灭火机器人,当其中的一个灭火机器人被主动唤醒或被动唤醒后,该灭火机器人通过雷达和高温耐高温摄像头分别对周围的其它灭火机器人进行定位和图像检测,并发送唤醒信号。其余灭火机器人接收到信号后将信息以电信号的形式传达至处理器,处理器向电机驱动模块、传感器信息采集模块、飞行器模块、灭火器模块输出信号,对机器人机群完成相互唤醒。
45.2、灭火机器人的两种运动模式原理。
46.根据火灾现场的实际情况,可以选择飞行模式或行走模式。如图1所示,若选用飞行模式,则mini主机35的处理器输出信号给飞行器模块,飞行器模块先控制第二支翼围绕旋转关节旋转以伸展机翼,再发送信号给第一驱动电机47以驱动螺旋桨43转动提供升力,完成飞行动作;如图2所示,若选用行走模式,mini主机35的处理器输出信号给底盘电路板控制第二驱动电机工作,第二驱动电机驱使驱动轮转动,从而带动履带前进,完成行走动作。
47.3、灭火机器人的运动转向与智能避障原理。
48.雷达和高清耐高温摄像头,通过红外温度探测和机器视觉技术对智能灭火机器人周围环境物体进行检测定位,并将采集到的障碍物位置信息通过传感器采集模块传达至mini主机的处理器进行处理。mini主机将障碍物的位置信息通过天线分享给其余灭火机器。在飞行模式下,mini主机根据障碍物位置控制四个第一驱动电机的转速,从而改变螺旋桨升力,使智能灭火机器人机身发生侧倾以避开障碍物,通过控制左右两侧的第一驱动电机的转速也可以完成转向动作,原理同上。在行走模式下,mini主机根据障碍物位置通过底
盘电路板控制六个第二驱动电机的转速,当左右两侧转速不同时,智能灭火机器人将向转速较慢的一侧转向,通过这种方式智能灭火机器人还可以完成避障动作。
49.4、火源定位及智能灭火原理。
50.利用高清耐高温摄像头通过机器视觉技术对比分析现场残留物以及烟雾浓度传感器检测到的烟雾浓度变化情况,mini主机的处理器可以大致判断火源位置,并控制灭火机器人靠近火源。同时,mini主机将雷达定位到的准确火源位置通过天线发送给就近消防站及安全管理平台。根据高清耐高温摄像头通过机器视觉技术判断的火源类型,mini主机控制灭火器使用对应的灭火材料对火源进行喷射灭火。飞行模式下,mini主机根据火源与灭火器喷射口的相对位置控制四个第一驱动电机的转速,从而改变螺旋桨升力,微调智能灭火机器人飞行姿态,确保灭火器喷射口对准火源喷射灭火材料,实现灭火。当灭火器内的材料耗尽或烟雾浓度传感器、温度传感器检测到环境烟雾浓度与温度低于预设的上限值时,智能灭火机器人完成灭火任务,返回原位或设定位置。
51.本发明的多模态智能灭火机器人,适用于室内密闭环境、城市复杂工况、森林地貌等多种火灾易发环境,通过对灾害进行实时检测,采取不同的运动模式,完成消防灭火任务。一些具体应用方案如下:情况1:智能灭火机器人在室内环境内展开消防灭火工作时;当智能灭火机器人处于休眠状态时,机器人上搭载的烟雾浓度传感器、温度传感器仍然在电池提供电力的驱动下对周围环境的烟雾浓度、温度等参数进行实时监测;一旦在室内环境出现火情,导致室内环境的烟雾浓度和温度超出机器人上搭载的烟雾浓度传感器以及温度传感器所设定的正常范围极限值时,烟雾浓度传感器以及温度传感器会迅速响应并向mini主机反馈报警。mini主机在接收到报警信号后,会立即唤醒灭火机器人整机,并结合烟雾浓度传感器以及温度传感器采集到的烟雾浓度与温度数据和高清耐高温摄像头捕捉到的图像信息,运算处理得到火源的大致方向、位置,最后控制机器人采取适当的运动模式前往火源处进行消防灭火工作,从而达到短时间内消除较小火情,防止火势在室内扩散,造成人员恐慌和伤亡。
52.情况2:智能灭火机器人遇到城市突发火情事故时。
53.城市一些突发事故容易导致火情产生,例如,汽车自燃、煤气爆炸、油罐车失火等。
54.当中央控制系统接受到群众报警后,会迅速定位事故发生地位置,并将位置地信息告诉智能灭火机器人。智能灭火机器人在被告知事故地位置后,mini主机立即响应,控制机器人运动模式切换为飞行模式,赶往事故地进行抢险救援。在飞行模式状态下,第二支翼会围绕第一支翼旋转张开机翼,此时,第一驱动电机启动,第一驱动电机上端的主动齿轮开始运动旋转,带动从动齿轮旋转,从而驱动安装在从动齿轮上端的螺旋桨运动并产生足以支持机器人飞行的空气升力,使智能灭火机器人能够稳定在空中进行飞行。
55.飞行途中,雷达会不断更新智能灭火机器人实时位置,并送报给中央控制系统,以进行调配。除此之外,雷达还可以探测机器人周边障碍物位置及相对距离,结合高清耐高温摄像头采集到的图像,mini主机进行信息运算处理后,控制机器人避开障碍物,并向目的地继续飞行。
56.智能灭火机器人飞行避障或飞行转向的具体操作是,当机器人识别到障碍物时,mini主机会对机器人四个第一驱动电机的转速进行调整变动,减小转向侧的第一驱动电机
转速,增大或保持非转向侧第一驱动电机的转速,从而改变四个机翼组件的空气升力大小,使得机器人机身发生倾斜,实现机器人运动方向的变动。
57.智能灭火机器人相比于人力出警,响应更加及时、救援速度更快,并且还可以减少人力物力的消耗,节省资源。
58.情况3:智能灭火机器人在发生森林火灾事故时。
59.当森林发生火情时,火势往往十分凶猛,直接深入火场进行救火工作极为容易对人生安全造成威胁。并且森林地形复杂,因此需要智能灭火机器人采用行走模式或行走模式与飞行模式结合的运动方式进行灭火救援工作。
60.智能灭火机器人首先通过采用飞行模式,代替消防人员进入火场,根据机器人身上搭载的烟雾浓度传感器、温度传感器对火场的有毒气体浓度值、现场温度进行实时检测,获取相应数据;雷达可以检测机器人位置,通过高清耐高温摄像头可以对现场受灾图像进行拍摄。机器人一方面可以通过处理这些信息,判断并靠近目标位置;另一方面,智能灭火机器人可以将这部分信息发送给消防人员,为消防人员下一步救援工作提供必要信息资料。
61.智能灭火机器人也可以采用行走模式的运动方式。当机器人使用行走模式时,第二驱动电机驱动其输出轴旋转,带动与第二驱动电机连接的驱动轮旋转,从而使履带运动,完成前进动作。当mini主机下达行走运动命令时,底盘内部的底盘电路板接受命令并控制电机转速使机器人加速、减速或保持匀速运动;当需要转向时,底盘电路板也可通过控制驱动轮的转速或转动方向,使左履带组件、右履带组件中的驱动轮产生差速或反向转动,导致左履带组件、右履带组件中的履带差速转动或反向转动,实现机器人运动方向的改变。该运动模式通过结合高清耐高温摄像头和雷达检测障碍物位置,可以保证智能灭火机器人在陆上平稳可靠运动。
62.情况4:建筑面积较大的区域场所内的火灾探测、初期控火。
63.对于建筑面积区域较大的工业园区、会展中心等场所,通过配置若干多模态智能灭火机器人,一旦着火区域的灭火机器人收到干扰,不能正常有效工作,相邻的机器人同样可以被唤醒和执行火灾探测和初期控火作用,多机器人协同时变编队控制算法和动态调整策略,同时建立基于图像深度学习算法的视频结构化智能分析系统,实现对建筑面积较大的区域场所内火灾探测、初期精准控火。
64.本发明还提供了的一种多模态智能灭火机器人的使用方法,包括如下步骤:步骤1:智能灭火机器人多模态唤醒;步骤2:选择运动模式;步骤3:运动转向与智能避障;步骤4:火源定位及智能灭火。
65.具体的,步骤1包括:步骤1.1:利用远程遥控器控制按钮将起动信息给予天线,信息将从导线以电信号的形式传达至mini主机内置处理器,并向电机驱动模块、传感器信息采集模块、飞行器模块、灭火器模块输出信号,对休眠模式的智能灭火机器人完成主动唤醒;步骤1.2:烟雾浓度传感器、温度传感器实时监测环境温度与烟雾浓度,并将数值与mini主机设定的温度、烟雾浓度上限值进行比对,当环境温度或烟雾浓度超过了mini主
机设定的温度、烟雾浓度上限值时,信息将从导线以电信号的形式传达至mini主机内置处理器,并向电机驱动模块、传感器信息采集模块、飞行器模块、灭火器模块输出信号,对休眠模式的智能灭火机器人完成被动唤醒;步骤1.3:智能灭火机器人唤醒后,可以激活传感器信息采集模块中的雷达和高清耐高温摄像头,分别对机器人集群的其余智能灭火机器人进行定位与图像检测并发送唤醒信号,其余智能灭火机器人接收到信号后将信息以电信号的形式传达至mini主机内置处理器,并向电机驱动模块、传感器信息采集模块、飞行器模块、灭火器模块输出信号,对机器人机群完成相互唤醒。
66.步骤2中,若为飞行模式,mini主机输出信号控制第二支翼围绕旋转关节旋转以伸展机翼,并控制第一驱动电机驱动螺旋桨以提供升力,完成飞行动作;若为行走模式,mini主机输出信号给底盘电路板控制第二驱动电机驱动驱动轮带动履带前进,完成行走动作。
67.步骤3包括:步骤3.1:利用传感器信息采集模块中的雷达和高清耐高温摄像头,通过红外温度探测和机器视觉技术对智能灭火机器人周围环境物体进行检测定位,并将采集到的障碍物位置传达至mini主机进行处理。
68.步骤3.2:mini主机将信号通过天线将障碍物位置分享给机器人机群。
69.步骤3.3:飞行模式下,mini主机根据障碍物位置控制四个第一驱动电机转速,从而改变螺旋桨升力,使智能灭火机器人机身发生侧倾以避开障碍物,通过控制左右两侧第一驱动电机转速也可以完成转向动作,原理同上;行走模式下,mini主机根据障碍物位置控制底盘电路板使六个第二驱动电机转速,当左右两侧转速不同时,智能灭火机器人将向转速较慢的一侧转向,通过这种方式智能灭火机器人还可以完成避障动作。
70.步骤4包括:步骤4.1:利用高清耐高温摄像头通过机器视觉技术对比分析现场残留物以及烟雾浓度传感器检测到的烟雾浓度变化情况,mini主机运算器可以大致判断火源位置,并控制运动机构靠近火源;步骤4.2:mini主机将雷达定位到的准确火源位置通过天线发送给就近消防站及安全管理平台;步骤4.3:根据高清耐高温摄像头通过机器视觉技术判断的火源类型,mini主机控制灭火器以对应灭火材料对火源进行喷射灭火;步骤4.4:飞行模式下,mini主机根据火源与灭火器喷射口相对位置控制四个第一驱动电机转速,从而改变螺旋桨升力,微调智能灭火机器人飞行姿态,确保灭火器喷口对准火源喷射灭火材料,实现灭火;步骤4.5:当灭火器材料耗尽或烟雾浓度传感器、温度传感器检测到环境烟雾浓度与温度低于预设上限值,智能灭火机器人完成灭火任务,返回原位或设定位置。
71.本发明的有益效果在于:1、本发明结合了多种机械运动结构及多种传感器,以使机器人能够适应更复杂、更多样的环境和灾情。除此之外,本发明还提供了多模态唤醒的方式,使其使用更加智能、方便。
72.2、本发明提供的智能灭火机器人具备两种运动模式——飞行模式和行走模式,多
运动模式弥补了现有灭火机器人模式单一问题,难以应对复杂地形环境的缺点。行走模式主要采用履带结构,可以在复杂多变的地形上平稳地运动行走。在无火情时候,机器人处于休眠状态,此时机翼处于折叠状态,以减小体积;当突发灾情,机器人被唤醒,机翼可伸展成飞行状态,同时四个螺旋桨带给机器人足够的升力,保证机器人能够稳定飞行和控制。多运动模式的特性可以使智能灭火机器人应对更多更复杂的环境,保证了机器人的机动性和适用性,提高了其火灾探测、图像处理、初期控火的工作效率。
73.3、本发明的智能灭火机器人搭载有多种传感器,可以对受灾区域进行实时监测,并向消防人员提供现场相关数据和受灾图像等信息,为消防人员采取下一步行动提供了参考,解决了现有机器人无法提供现场灾情资料,导致消防或者安全员无法及时知道灾情情况的问题。毫米波雷达可以侦测机器人所处位置和周边障碍物,高清耐高温摄像头可以对现场灾情情况进行观察和拍摄,而机内搭载的烟雾浓度传感器和温度传感器采集到烟雾浓度、温度数据等信息,这些信息通过5g通讯技术发送给场外消防和安全工作人员。
74.4、本发明的智能灭火机器人可以通过传感器进行整机唤醒,这种自动化的方式能够保证灭火机器人能够在火势突发的时候及时响应,因此,本发明相比一般灭火机器人更加智能。当烟雾浓度传感器或温度传感器探测到周围环境烟雾浓度或温度超出正常范围,可自动唤醒机器人整机,并及时对火情进行消除。这种方式保证了灭火机器人可以在火势较小时迅速熄灭,防止灾情进一步扩大,避免造成更严重的人员伤亡及财产损失。
75.5、本发明的智能灭火机器人可以在火势较大时,可以利用自身运动模式的优势特性代替消防人员去完成火情的救援消防工作,避免了消防人员进入危险的灾区环境,造成不必要的伤亡。
76.以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1