舟艇模拟训练方法及系统与流程
1.本发明涉及一种适用于龙舟、赛艇、皮划艇或其他舟艇船模拟训练的舟艇模拟训练方法,同时涉及一种适用于龙舟、赛艇、皮划艇或其他舟艇船模拟训练的舟艇模拟训练系统。
背景技术:
2.龙舟在我国是一个历史悠久的传统体育项目,现在已经被国家体育总局列为体育比赛项目。赛艇和皮划艇作为奥运比赛项目,在国内外也都很受重视。为了在龙舟比赛、赛艇比赛、皮划艇或其他舟艇船比赛中取得好成绩,龙舟、赛艇、皮划艇或其他舟艇船(以下统称舟艇)项目的经常训练是必不可少的。
3.比赛选手在日常训练过程中一般采用水上实际训练和陆地模拟训练两种形式。对于水上实际训练来说,天气和距离等原因经常对日常训练造成一些困难。对于陆地模拟训练而言,现有的训练器材真实互动感不够强,趣味性不够强,而且提供的数据没有或不多,专业性也不够。
4.专利号为zl 201711288588.5的中国发明专利对此作出了改进,提供了一种龙舟划桨桨频及力量平衡测试器。上述龙舟划桨桨频及力量平衡测试器,包括模拟桨、测试舟、水池和检测单元,测试舟漂浮在水池内,测试舟两侧均排列若干个坐垫,检测单元固定在水池壁上,检测单元包括测试块、第一压力传感器、第二压力传感器、连杆、微处理器和显示屏,测试块两端均活动卡接在水池两侧壁上,测试块两端与水池壁接触面分别固定有第一、二压力传感器,第一、二压力传感器分别检测测试块两端所受压力并均与微处理器电连接,连杆与测试块和测试舟尾部铰接。模拟桨中包含压力和倾角传感器。上述发明专利所提供的龙舟划桨桨频及力量平衡测试器,能够适用于单人或多人协同划桨的桨频、力量及平衡测试,为协同划桨训练提供数据参考。但是,上述发明专利所提供的龙舟划桨桨频及力量平衡测试器,缺乏与模拟舟艇软件的互动。
技术实现要素:
5.本发明所要解决的首要技术问题在于提供一种舟艇模拟训练方法,适用于龙舟、赛艇、皮划艇或其他舟艇船的模拟训练。
6.本发明所要解决的另一技术问题在于提供一种舟艇模拟训练系统,用于实现上述舟艇模拟训练方法。
7.为了实现上述目的,本发明采用下述的技术方案:
8.根据本发明实施例的第一方面,提供一种舟艇模拟训练方法,包括如下步骤:
9.(1)将真实舟艇放置在水面上或可滑动的平面上,舟艇传感装置连接于舟尾与系泊装置之间;
10.(2)获取舟艇传感装置测得的真实舟艇与系泊装置间的实时拉力,计算模拟舟艇的实时速度;
11.(3)确定模拟舟艇的偏转角度;
12.(4)根据模拟舟艇的实时速度和偏转角度,计算出模拟舟艇的航行轨迹;
13.(5)实时更新模拟舟艇在虚拟场景中的航行轨迹。
14.其中较优地,在步骤(2)中,根据所述龙舟传感装置测得的真实舟艇的偏转角度确定所述模拟舟艇的偏转角度;或者,使用模拟舟艇的默认偏转角度作为所述模拟舟艇的偏转角度,其中,所述模拟舟艇的默认偏转角度为0度。
15.其中较优地,所述舟艇模拟训练方法还包括步骤(6):获取每个桨传感装置测得的划桨的速度、频率或角度中的至少一种,更新模拟舟艇上对应虚拟人物划桨的速度、频率或角度中的至少一种,两者分别相等。
16.其中较优地,所述舟艇模拟训练方法还包括步骤(7):判断每个桨传感装置测得的频率是否与鼓点测量装置测得的击鼓频率和/或所有选手划桨的平均频率一致,如果频率不一致时,对外输出提示。
17.其中较优地,在步骤(7)中,使用每个桨传感装置测得的实时频率p
i
(t)与由鼓点测量装置测得的击鼓频率p(t)所确定的第一频率阈值范围[p(t)-p,p(t)+p]进行比较,p为某一频率值;当每个桨传感装置测得的实时频率p
i
(t)超出第一频率阈值范围时,判断对应选手的划桨频率与鼓点测量装置测得的击鼓频率不一致;
[0018]
使用每个桨传感装置测得的实时频率p
i
(t)与由所有选手划桨的平均频率所确定的第二频率阈值范围进行比较,p为某一频率值;当每个桨传感装置测得的实时频率超出第二频率阈值范围时,判断对应选手的划桨频率与所有选手划桨的平均频率不一致。
[0019]
其中较优地,所述舟艇模拟训练方法还包括步骤(8):同时在虚拟场景中显示多个模拟舟艇的航行轨迹,其中,部分或全部模拟舟艇的航行轨迹分别由多艘真实舟艇的实时航行轨迹确定,其余模拟舟艇的航行轨迹使用系统中存储的航行轨迹或者使用事先设定的轨迹数据。
[0020]
其中较优地,在步骤(2)中,使用如下公式计算模拟舟艇的速度v(t):
[0021]
f(t)-f(t)=m
×
a(t)
[0022][0023]
f(t)=λ
×
v(t)2[0024]
其中,f(t)为舟艇传感装置测到的实时拉力,f(t)为模拟舟艇在水面行驶的阻力,m为真实舟艇和舟艇上所有选手的总质量,a(t)为模拟舟艇行驶的加速度,v(t)为模拟舟艇的速度,v0为模拟舟艇的初始速度,t为模拟舟艇从初始时刻0开始航行的时间,λ为模拟舟艇阻力系数。
[0025]
其中较优地,在步骤(4)中,根据模拟舟艇的实时速度v(t)和偏转角度θ,计算模拟舟艇的航行轨迹的公式如下:
[0026][0027]
[0028]
其中,从舟艇指向水池的正前方设为x轴,水平面内与x轴垂直的为y轴,θ为真实舟艇舟身中轴线(从舟尾指向舟头)与x轴的夹角;dx(t)为模拟舟艇在虚拟场景中的实时位置在x轴的分量,dx0为初始位置在x轴的分量;dy(t)为模拟舟艇在虚拟场景中的实时位置在y轴的分量,dy0为初始位置在y轴的分量。
[0029]
根据本发明实施例的第二方面,提供一种舟艇模拟训练系统,用于实现上述舟艇模拟训练方法,包括一艘或多艘真实舟艇、一个或多个舟艇传感装置、控制主机、声音输出装置和图像输出装置,其中,
[0030]
所述舟艇用于放置在水面上,或者,所述舟艇用于放置在可滑动的平面上;
[0031]
在每艘舟艇的舟尾与所述舟艇的系泊装置间连接有所述舟艇传感装置,所述舟艇传感装置与所述控制主机通过有线或无线的方式实现数据交互;
[0032]
所述控制主机分别与声音输出装置和图像输出装置连接;
[0033]
所述控制主机包括控制模块、航迹处理模块和存储模块;
[0034]
其中,控制模块用于实现各模块的协调工作;航迹处理模块用于根据舟艇传感装置测得的实时拉力计算模拟舟艇的速度,并根据舟艇传感装置测得的真实舟艇的偏转角度或使用默认偏转角度确定模拟舟艇的偏转角度,然后根据模拟舟艇的实时速度和偏转角度,计算出模拟舟艇的航行轨迹;控制模块根据航迹处理模块计算出的模拟舟艇的航行轨迹,控制图像输出装置对虚拟场景中的模拟舟艇的航行轨迹进行实时更新和显示,并控制声音输出装置播放多种声音和音乐;所述存储模块用于存储所有真实龙舟的航行状态参数及所述航迹处理模块计算出的模拟龙舟的航行轨迹。
[0035]
其中较优地,所述舟艇模拟训练系统还包括多个桨传感装置,桨传感装置固定在桨上,并与控制主机通过无线的方式实现数据交互;
[0036]
所述控制主机还包括划桨频率处理模块;所述划桨频率处理模块用于获取桨传感装置所测得的速度、频率或角度中的至少一种;控制模块还用于根据划桨频率处理模块所获取的数据,控制图像输出装置更新模拟舟艇上对应虚拟人物划桨的速度、频率或角度中的至少一种。
[0037]
其中较优地,所述划桨频率处理模块还用于判断每个桨传感装置所测得的频率是否与所有选手划桨的平均频率一致,并将判断结果发送给控制模块;所述控制模块根据上述判断结果,对划桨频率不一致的情况,输出提示信息。或者,其中较优地,所述舟艇模拟训练系统还包括鼓点测量装置;所述划桨频率处理模块还用于判断每个桨传感装置所测得的频率是否与鼓点测量装置测得的击鼓频率一致,并将判断结果发送给控制模块;所述控制模块根据上述判断结果,对划桨频率不一致的情况,输出提示信息。
[0038]
其中较优地,真实舟艇漂浮在水池中的水面上,在水池中舟艇前端的水面下方设置一个或多个喷水装置,可以使得水面向舟艇尾部流动,模拟真实水面划舟艇的水流;喷水的速度还可与模拟舟艇的速度相匹配;舟艇尾部的水流可通过管道再回到舟艇前端,完成一个水流的循环,模拟水流的效果更好。
[0039]
本发明所提供的舟艇模拟训练方法和系统,通过采集真实舟艇的实时航行参数(包括实时拉力和偏转角度),确定模拟舟艇的实时速度和偏转角度,从而计算出模拟舟艇的航行轨迹,然后实时更新模拟舟艇在虚拟场景中的航行轨迹,模拟出真实舟艇在水上航行时的状态,增强了舟艇模拟训练的互动感和趣味性。
附图说明
[0040]
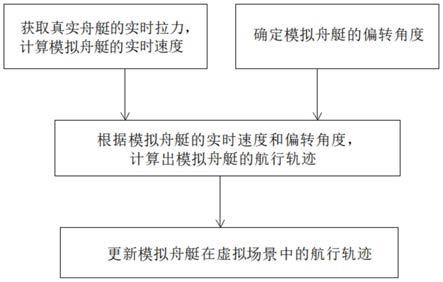
图1是本发明所提供的舟艇模拟训练方法的流程图;
[0041]
图2是本发明所提供的舟艇模拟训练系统的组成结构框图;
[0042]
图3是本发明实施例所提供的舟艇模拟训练系统的结构示意图。
具体实施方式
[0043]
下面结合附图和具体的实施例对本发明的技术方案进行进一步地详细描述。
[0044]
本发明所提供的舟艇模拟训练方法和系统,用于实现单艘舟艇或多艘舟艇的模拟训练。通过在虚拟场景中再现模拟舟艇的航行轨迹,模拟舟艇的航行轨迹和真实舟艇的航行状态相对应,可以对真实舟艇的训练效果进行可视化的显示,增强了舟艇模拟训练的互动感和趣味性,可以用于舟艇(包括龙舟、赛艇、皮划艇或其他舟艇船)的训练和测试。
[0045]
如图1所示,本发明所提供的舟艇模拟训练方法,包括如下步骤:(1)将舟艇放置在水面上或放置在可滑动的平面上,将舟艇传感装置连接于舟尾与系泊装置之间,系泊装置固定设置在水池边或可滑动的平面上;(2)获取舟艇传感装置测得的真实舟艇与系泊装置间的实时拉力,计算模拟舟艇的实时速度;(3)确定模拟舟艇的偏转角度;(4)根据模拟舟艇的实时速度和偏转角度,计算出模拟舟艇的航行轨迹;(5)更新模拟舟艇在虚拟场景中的航行轨迹。其中,步骤(2)和步骤(3)是并列进行的步骤,可以同时进行,也可以先后进行,步骤(2)和步骤(3)的完成顺序对上述舟艇模拟训练方法的实施没有实质性影响。
[0046]
具体来说,在步骤(1)中,可以将真实舟艇漂浮在水池中的水面上,也可以放置在一个可以让舟艇滑动的平面上。
[0047]
当将真实舟艇漂浮在水池中的水面上时,在水池中舟艇前端的水面下方设置一个或多个喷水装置,可以使得水面向舟艇尾部流动,模拟真实水面划舟艇的水流;喷水的速度还可与模拟舟艇的速度相匹配;舟艇尾部的水流可通过管道再回到舟艇前端,完成一个水流的循环,模拟水流的效果更好。
[0048]
当不考虑真实舟艇的偏转角度,或将真实舟艇放置在可滑动的平面上时,受限于舟艇底部的滑轮或其他降低阻力的装置或方法,其滑动轨迹接近于直线,此时可以不采集或不考虑舟艇的偏转角度,使其等于默认偏转角度,默认偏转角度为0度。
[0049]
在步骤(2)中,根据舟艇传感装置测到的实时拉力f(t),使用如下公式计算模拟舟艇的实时速度v(t):
[0050]
f(t)-f(t)=m
×
a(t)
ꢀꢀ
(1)
[0051][0052]
f(t)=λ
×
v(t)2ꢀꢀ
(3)
[0053]
其中,f(t)为舟艇传感装置测到的实时拉力,f(t)为模拟舟艇在水面行驶的阻力,m为真实舟艇和舟艇上所有选手的总质量,a(t)为模拟舟艇行驶的加速度,v(t)为模拟舟艇的实时速度,v0为模拟舟艇的初始速度,t为模拟舟艇从初始时刻0开始航行的时间,λ为模拟舟艇阻力系数。
[0054]
根据公式(1)、(2)和(3),可以计算出模拟舟艇的实时速度v(t)。
[0055]
在步骤(3)中,根据龙舟传感装置测得的真实舟艇的偏转角度确定模拟舟艇的偏
转角度,或者,使用默认偏转角度作为模拟舟艇的偏转角度。
[0056]
其中,当舟艇传感装置采集真实舟艇的偏转角度时,使模拟舟艇的偏转角度θ等于获取舟艇传感装置测得的真实舟艇的偏转角度。水池正前方设为x轴,水平面内与x轴垂直的为y轴,θ为真实舟艇舟身中轴线与x轴的夹角。
[0057]
当不考虑和不测量真实舟艇的偏转角度时(例如,舟艇在可滑动的平面上直线滑动时,不考虑也不需要采集真实舟艇的偏转角度),使模拟舟艇的偏转角度等于默认偏转角度0度。
[0058]
在步骤(4)中,根据模拟舟艇的实时速度v(t)和偏转角度θ,计算模拟舟艇的航行轨迹。模拟舟艇的航行轨迹与真实舟艇的实时航行状态相对应。
[0059]
其中,从舟艇指向水池的正前方设为x轴,水平面内与x轴垂直的为y轴,θ为真实舟艇舟身中轴线(从舟尾指向舟头)与x轴的夹角。dx(t)为模拟舟艇在虚拟场景中的实时位置在x轴的分量,dx0为初始位置在x轴的分量;dy(t)为模拟舟艇在虚拟场景中的实时位置在y轴的分量,dy0为初始位置在y轴的分量。
[0060][0061][0062]
使用公式(4)和公式(5)分别计算模拟舟艇在虚拟场景中的实时位置。
[0063]
在步骤(5)中,实时更新模拟舟艇的航行轨迹,并在虚拟场景中进行显示。
[0064]
通过上述舟艇模拟训练方法,可以在虚拟场景中真实再现模拟舟艇的航行轨迹,模拟舟艇的航行轨迹与真实舟艇的航行状态相对应,从而增加了舟艇模拟训练的趣味性和互动性。
[0065]
作为本发明实施例的优选方案,在该舟艇模拟训练方法中,还可以包括对每个选手划桨状态进行再现、评估和反馈的步骤。其中,在步骤(6)中,获取每个桨传感装置测得的速度、频率或角度中的至少一种,更新模拟舟艇上对应虚拟人物划桨的速度、频率或角度中的至少一种,两者分别相等。在步骤(7)中,判断每个桨传感装置测得的频率是否与鼓点测量装置测得的击鼓频率和/或所有选手划桨的平均频率一致,如果频率不一致时,对外输出提示信息。当某个选手的划桨频率与其他选手或鼓点测量装置测得的击鼓频率不一致时,控制主机会给出相应语音或画面提示,或者,桨传感装置会给出声音、灯光或震动提示。
[0066]
在步骤(7)的判断过程中,使用每个桨传感装置测得的实时频率p
i
(t)与由鼓点测量装置测得的击鼓频率p(t)所确定的第一频率阈值范围[p(t)-p,p(t)+p]进行比较,p为某一频率值,p值的大小可以根据想要达到的训练效果预先设置;当某个桨传感装置测得的实时频率p
i
(t)超出第一频率阈值范围时,判断对应选手的划桨频率与鼓点测量装置测得的击鼓频率不一致,对对应选手给出提示。鼓点测量装置测得的击鼓频率p(t)可以是真实舟艇中的击鼓选手所演奏的鼓声的击鼓频率,也可以是预先存储的鼓声所对应的的击鼓频率。
[0067]
较优地,同时使用每个桨传感装置测得的实时频率p
i
(t)与由所有选手划桨的平均频率所确定的第二频率阈值范围进行比较,当每个桨传感装置测得的实时频率超出第二频率阈值范围时,判断对应选手的划桨频率与所有选手划桨的平
均频率不一致,对对应选手给出提示。
[0068]
在步骤(7)中,可以仅判断每个桨传感装置测得的频率是否与鼓点测量装置测得的击鼓频率一致,也可以仅判断每个桨传感装置测得的频率是否与所有选手划桨的平均频率一致,还可以同时判断每个桨传感装置测得的频率是否与鼓点测量装置测得的击鼓频率以及所有选手划桨的平均频率一致。以上三种判断方式均可对选手的划桨状态提供反馈,改进选手的划桨状态。
[0069]
设p
i
(t)为第i(i=1,2,
…
,n)个选手在t时刻划桨的频率,为所有选手在t时刻划桨的平均频率,p(t)为鼓点测量装置测到的击鼓节奏,p为预先设置的某一频率值,则:
[0070][0071]
当时,确定该选手的划桨频率快于所有选手的平均频率,输出该选手的划桨频率快于所有选手的平均频率的声音或画面提示,或者使桨传感装置发出相应震动、声音或某种颜色的灯光闪烁;
[0072]
当时,确定该选手的划桨频率慢于所有选手的平均频率,输出该选手的划桨频率慢于所有选手的平均频率的声音或画面提示,或者使桨传感装置发出相应震动、声音或某种颜色的灯光闪烁;
[0073]
当p
i
(t)>p(t)+p时,确定该选手的划桨频率快于击鼓频率,输出该选手的划桨频率快于击鼓频率的声音或画面提示,或者使桨传感装置发出相应震动、声音或某种颜色的灯光闪烁;
[0074]
当p
i
(t)<p(t)-p时,确定该选手的划桨频率慢于击鼓频率,输出该选手的划桨频率慢于击鼓频率的声音或画面提示,或者使桨传感装置发出相应震动、声音或某种颜色的灯光闪烁。
[0075]
上述舟艇模拟训练方法,还可以用于实现多艘舟艇的模拟比赛。具体来说,在上述步骤(1)至(5)或步骤(1)至步骤(7)的基础上,还包括步骤(8),通过在虚拟场景的同一赛道上使用多艘模拟舟艇同时再现与多艘真实舟艇的航行状态相对应的航行轨迹,实现多艘真实舟艇的比赛。在比赛过程中所使用的部分或全部模拟舟艇的航行轨迹分别由多艘真实舟艇的实时航行轨迹确定,其余模拟舟艇的航行轨迹可以使用系统中存储的航行轨迹或者使用事先设定的航行轨迹。
[0076]
具体实现方式有两种,该软件模拟多艘舟艇比赛的方法有两种:
[0077]
第一种,将多条真实舟艇在水池中比赛时的实时数据同时接入同一个控制主机,同时在虚拟场景中显示多个模拟舟艇的航行轨迹,从而实现在一个虚拟赛道中比赛。
[0078]
第二种,之前的选手在水池中的真实舟艇上航行时的实时速度、方向和航行轨迹数据被储存下来;一条或多条真实舟艇在水池中比赛时,画面中的另外某一条或多条模拟舟艇的航行轨迹由之前储存的轨迹数据驱动,这样来进行比赛。或者,一条或多条真实舟艇在水池中比赛时,画面中的另外某一条或多条模拟舟艇的航行轨迹由由在控制主机中事先设定的轨迹数据驱动,这样来进行比赛。也可以是,一条或多条真实舟艇在水池中比赛时,画面中的剩余模拟舟艇中部分模拟舟艇的航行轨迹由之前储存的轨迹数据驱动,部分模拟舟艇由在控制主机中事先设定的轨迹数据驱动。
[0079]
通过上述舟艇模拟训练方法,不仅可以对单艘舟艇的所有选手进行水上模拟训练和测试,还可以对多艘舟艇进行模拟比赛,更有利于改善训练效果。
[0080]
本发明同时提供了一种舟艇模拟训练系统,用于实现上述舟艇模拟训练方法。
[0081]
如图2和图3所示,本发明实施例所提供的舟艇模拟训练系统包括一艘或多艘真实舟艇2、一个或多个舟艇传感装置7、多个桨传感装置9a、控制主机10、无线接收装置11、鼓点测量装置12、声音输出装置13(如扬声器)和图像输出装置14(如显示屏幕)。其中,舟艇2放置在水池1(也可以是水塘)中的水面上,或者,舟艇2放置在可滑动的平面上;在每艘舟艇2的舟尾与固定设置的系泊装置(系泊装置固定设置在岸边或可滑动的平面上)之间均连接有舟艇传感装置7;在每个桨上固定有桨传感装置9a;舟艇传感装置7和桨传感装置9a可通过无线接收装置11与控制主机10实现数据的无线交互(如图2中虚线所示),或者,舟艇传感装置7也可与控制主机10通过线缆有线连接传输数据(如图2中实线所示)。控制主机10分别与鼓点测量装置12、无线接收装置11、声音输出装置13和图像输出装置14连接。
[0082]
具体来说,较优地,水池1(也可以是水塘)中装有水,一艘或多艘真实舟艇2并排设置在水面上。为了能让选手真实的划桨,本方案在陆地上设计有一个水池1,或者利用现有的小水塘,把真实舟艇2放到水池1里进行训练。为了能真实地模拟舟艇2在河道中航行的感觉,可以在水池1中每艘真实舟艇2前端的水面下方设置一个或多个喷水装置,使真实舟艇2所在的水面向后流动,让选手真实体验在流水中划桨的感受。喷水的速度还可与模拟舟艇的速度相匹配;舟艇尾部的水流可通过管道再回到舟艇前端,完成一个水流的循环,模拟水流的效果更好。系泊装置固定在水池边,舟艇2的舟尾与系泊装置通过绳子连接。
[0083]
也可以,水池1中没有水,将舟艇2设置在可滑动的平面上,在舟艇2的底部设置滑轮,从而可以使舟艇2在平面上滑动。当将舟艇2设置在可滑动的平面上时,在舟艇2的后方设置有固定到平面的系泊装置。受限于滑轮的作用,舟艇2将沿着近似直线的轨迹移动,此时,舟艇2的偏转角度近似为0。
[0084]
每艘真实舟艇2的舟尾与固定在水池1边的系泊装置之间连接有舟艇传感装置7。舟艇传感装置7的一端通过连接件8与舟尾进行连接,舟传感装置7的另一端通过连接件8与水池1进行连接,连接件8用于传递拉力。例如,舟艇传感装置7的两端可以分别通过一段绳子实现舟艇传感装置7与真实舟艇2或系泊装置的连接,两段绳子的一端分别与舟艇传感装置7连接,一段绳子的另一端系到舟尾,另一段绳子的另一端系到系泊装置上。或者,舟艇传感装置7两边也可以是两个挂钩,挂钩的一端分别与舟艇传感装置7连接,另一端分别勾到舟尾或系泊装置。或者,还可以使用两段带有挂钩的绳子实现舟艇传感装置7与真实舟艇2和水池1的连接,其中,绳子的一端系在舟艇传感装置7上,绳子的另一端连接有挂钩,方便舟艇传感装置7与真实舟艇2或系泊装置的连接。
[0085]
舟艇传感装置7至少用于采集舟艇2和系泊装置之间的实时拉力,舟艇传感装置7还可以用于采集舟艇2的偏转角度。舟艇传感装置7包含拉力传感器、角度传感器、数据传输模块和电源。拉力传感器可以采集舟艇2与系泊装置间的拉力。角度传感器测量舟艇2在水池1中因为左右两边选手力量不一致而偏转的方向;角度传感器可以采用霍尔效应角度传感器、编码器、加速度计陀螺仪磁力计等三轴、六轴或九轴传感器以及其他可以测量角度的传感器。如果不考虑和测量偏转角度,舟艇传感装置7也可不包含角度传感器。数据传输模块用于实现舟艇传感装置7与控制主机10的数据交互,可采用有线或无线方式进行传输。电
源用于给舟艇传感装置7中的各个电器元件供电。
[0086]
在真实舟艇2上设置有多排座位3,在真实舟艇2的两侧设置多个桨9(图中仅以一个桨作为示意),多个桨9分别对应于座位3设置。桨9包括桨柄4和桨叶5,其中,桨柄4和舟艇2可旋转式连接或不连接,桨柄4的下端设置有桨叶5。通过推拉浆柄4,实现划桨动作。在桨柄4上设置有桨传感装置9a,桨传感装置9a可以通过橡胶圆圈或其他方法固定在每个桨9的桨柄4上。桨传感装置9a采集每个桨9的划桨速度、频率、角度等参数中的一个或多个,并无线传输给无线接收装置11。桨传感装置9a中包含加速度计、陀螺仪、磁力计等三轴、六轴或九轴传感器、无线传输模块、反馈模块和电源。其中,加速度计、陀螺仪、磁力计等三轴、六轴或九轴传感器用于采集桨的划桨速度、频率、角度等参数,测量计算出划桨参数后通过无线传输模块将数据发送给无线接收装置。无线传输模块用于实现桨传感装置9a与控制主机10的数据交互。反馈模块用于提供震动、声音或灯光等反馈。电源用于给桨传感装置9a中的各个电器元件供电。
[0087]
舟艇传感装置7和桨传感装置9a分别与控制主机10通过无线方式实现数据交互;具体通过各自的无线传输模块和无线接收装置12实现舟艇传感装置7、桨传感装置9a和控制主机10之间的数据交互。
[0088]
无线接收装置11可接收舟艇传感装置7和所有桨9的桨传感装置9a的数据,并传输给控制主机10。无线接收装置11可以是独立的接收装置,无线接收装置11与控制模块101连接;无线接收装置11也可以是控制主机10的一部分,通过控制主机10内部的无线接收模块实现。舟艇传感装置7也可与控制主机10通过线缆有线连接传输数据(如图2中实线所示),此时无线接收装置11只接收所有桨9的桨传感装置9a的数据。
[0089]
在舟艇比赛中,击鼓是个重要环节。在舟艇2的前部设置有鼓6,用于鼓手击鼓,发出指挥鼓点节奏。鼓点测量装置11与控制主机10相连,用于测量鼓点的节奏,可以是真人击鼓鼓点的节奏,也可以是通过声音输出装置13发出的预先存储的虚拟击鼓鼓点的节奏。
[0090]
控制主机10上运行虚拟互动软件,可以在虚拟场景中的虚拟赛道上用模拟舟艇模拟该真实舟艇航行的动作和轨迹,并将模拟舟艇航行的画面显示在图像输出装置14上。
[0091]
控制主机10包括控制模块101、航迹处理模块102、划桨频率处理模块103和存储模块104。
[0092]
其中,控制模块101用于实现各模块的协调工作,存储模块104用于存储模拟训练过程中舟艇传感装置7、桨传感装置9a、鼓点测量装置11所采集的数据,各模块运行所需的数据,以及航迹处理模块102和划桨频率处理模块103所计算出的中间数据,还用于存储声音输出装置13和图像输出装置14对外输出的声音及图像数据。
[0093]
航迹处理模块102用于根据舟艇传感装置7测得的实时拉力计算模拟舟艇的速度;并根据舟艇传感装置7测得的真实舟艇的偏转角度或使用默认偏转角度确定模拟舟艇的偏转角度;然后根据模拟舟艇的实时速度和偏转角度,计算出模拟舟艇的航行轨迹。控制模块101根据航迹处理模块102计算出的模拟舟艇的航行轨迹,控制图像输出装置14对虚拟场景中的模拟舟艇的航行轨迹进行实时更新和显示。
[0094]
划桨频率处理模块103用于获取桨传感装置9a所测得的速度、频率或角度中的至少一种,控制模块101用于根据划桨频率处理模块103所获取的数据,控制图像输出装置14更新模拟舟艇上对应虚拟人物划桨的速度、频率或角度中的至少一种。
[0095]
划桨频率处理模块103还用于判断每个桨传感装置9a所测得的频率是否与鼓点测量装置12测得的击鼓频率和/或所有选手划桨的平均频率一致,并将判断结果发送给控制模块101。控制模块101根据上述判断结果,对划桨频率不一致的情况,输出提示信息。例如,控制图像输出装置14对外输出提示画面,或控制声音输出装置13对外输出声音提示,或向划桨频率不一致的桨传感装置9a输出反馈信息,使其对外输出震动、灯光或声音提示。
[0096]
存储模块104用于存储所有真实龙舟的航行状态参数及航迹处理模块102计算出的模拟龙舟的航行轨迹,并用于存储模拟龙舟的历史航行轨迹或预先设定的航线轨迹;同时,存储模块104用于存储划桨频率处理模块103的计算结果。优选地,在存储模块104中还存储有鼓乐。
[0097]
综上所述,本发明所提供的舟艇模拟训练方法,通过采集真实舟艇的实时拉力计算模拟舟艇的实时速度,通过采集真实舟艇的偏转角度(在不采集真实舟艇的偏转角度时,偏转角度可使用默认偏转角度)确定模拟舟艇的偏转角度,进而计算出模拟舟艇的航行轨迹,然后实时更新模拟舟艇的航行轨迹,并在虚拟场景中进行显示,模拟出真实舟艇在水上航行时的状态,增强了舟艇模拟训练的互动感和趣味性。并且,上述舟艇模拟训练方法还可采集每个选手的划桨频率、速度和角度,对每个选手划桨状态进行再现、评估和反馈,改进训练效果。通过上述舟艇模拟训练方法,不仅可以对单艘舟艇的所有选手进行水上模拟训练和测试,还可以对多艘舟艇进行模拟比赛,更有利于改进训练效果。
[0098]
以上对本发明所提供的舟艇模拟训练方法及系统进行了详细的说明。对本领域的一般技术人员而言,在不背离本发明实质内容的前提下对它所做的任何显而易见的改动,都将构成对本发明专利权的侵犯,将承担相应的法律责任。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1