数控多轴机床模拟训练装置的制作方法
1.本实用新型属于教学培训装备技术领域,特别是涉及数控多轴机床模拟训练装置的结构改进。
背景技术:
2.数控多轴机床模拟训练装置,是面向数控五轴教学与实训、程序验证、机床安全仿真模拟的一体化设备。用于多轴数控机床的操作模拟训练,模拟当前操作系统的加工场景,提供高效、实用、易用的数控机床仿真教学方案,可以充分满足院校和企业的需求,促进智能制造领域高素质复合型技能人才的技术提升和培养。
3.目前,市场上多数的数控多轴机床模拟训练装置,其结构主要包括两大部分,即装置主体和操作控制台,装置主体通常包括由内部框架和箱壳构成的箱体、工业显示器、设备开关、报警灯、扶手和设在箱体底部的多个脚轮等,操作控制台通常包括操作面板和工业触摸屏;操作控制台通过摇臂可水平转动地连接在装置主体上,同时操作控制台自身也可绕摇臂顶端轴线水平转动,从而使操作控制台的位置及朝向灵活调节,方便使用。具体地,摇臂的底端可转动地连接于装置主体,顶端可转动地连接操作控制台。
4.现有技术中,摇臂整体通常呈近似l形,在装置主体的底端处固设有安装座,安装座上设有竖直的转轴,摇臂的底端固设有套筒,套筒与转轴配合以实现摇臂相对装置主体转动,由于摇臂长度较大并向上延伸,且其顶端支撑有操作控制台,为减小摇臂在弯矩作用下变形,保证套筒与转轴始终同轴,以使摇臂转动顺畅,通常在摇臂的拐角处(即水平部和竖直部交界处)底部安装支撑轮,以对摇臂进行辅助支撑。
5.摇臂的这种安装结构使得整个装置放置在地面上时,除要尽可能保证脚轮水平支撑装置主体外,还需要保证摇臂的支撑轮与地面充分接触并使摇臂的水平部尽可能保证水平,使得装置整体结构复杂,且数控多轴机床模拟装置一旦制造成型后,若其脚轮及支撑轮不能调节,则若地面平整性较差,则很难保证支撑装置水平放置的同时摇臂的支撑轮与地面充分接触,使得摇臂稳定性难以保证。
技术实现要素:
6.本实用新型提供一种数控多轴机床模拟训练装置,摇臂与装置主体连接可靠,无需额外设置支撑轮来支撑摇臂。
7.为达到上述技术效果,本实用新型采用的技术方案是,一种数控多轴机床模拟训练装置,包括装置主体、操作控制台和摇臂,所述摇臂的底端通过第一连接组件可转动地连接于所述装置主体,所述摇臂的顶端通过第二连接组件可转动连接于所述操作控制台;
8.所述第一连接组件包括固定部件和转动部件,所述固定部件固设在所述装置主体的底部处,其包括上下间隔设置的固定顶板和固定底板,所述转动部件固设在所述摇臂的底端上,其包括上下间隔设置的转动顶板和转动底板,所述固定顶板和所述转动顶板可转动连接,所述固定底板和所述转动底板可转动连接,且所述固定部件和所述转动部件上设
有相互配合的限位结构,用于当所述摇臂相对所述装置主体转动到位时限制所述摇臂继续转动。
9.所述固定顶板和所述转动顶板通过上转动配合组件可转动连接,所述上转动配合组件包括上轴套和上转动轴,所述固定顶板上设有上安装孔,所述上轴套与所述上安装孔过盈配合,所述上转动轴与所述转动顶板固定连接,所述上转动轴与所述上轴套间隙配合;所述固定底板和所述转动底板通过下转动配合组件可转动连接,所述下转动配合组件包括下轴套和下转动轴,所述固定底板上设有下安装孔,所述下轴套与所述下安装孔过盈配合,所述下转动轴与所述转动底板固定连接,所述下转动轴与所述下轴套间隙配合。
10.所述上转动配合组件和所述下转动配合组件同轴线。
11.所述摇臂为一体成型的不锈钢管,其包括水平部、位于所述水平部上方的竖直部和连接所述水平部及所述竖直部的下弯弧形部,所述摇臂的底端上焊接有与其同轴设置的第一连接端头,所述第一连接端头具有第一中心通孔,所述摇臂的底端插设在所述第一中心通孔内,所述转动部件具有连接所述转动顶板和所述转动底板的转动侧板,所述第一连接端头与转动侧板螺钉连接,所述固定部件具有连接所述固定顶板和所述固定底板的固定侧板,所述固定侧板与所述装置主体螺钉连接。
12.所述限位结构包括一限位销轴、设在所述固定顶板上的多个第一限位孔、设在所述转动顶板上的一第二限位孔,所述限位销轴与所述第二限位孔及其中任一所述第一限位孔插设配合。
13.所述第二连接组件包括旋转阻尼铰链和十字连接座,所述旋转阻尼铰链连接所述摇臂的顶端和所述十字连接座的竖直部底端,使所述十字连接座可相对所述摇臂水平转动,所述操作控制台安装在所述十字连接座上。
14.所述摇臂的顶端上焊接有与其同轴设置的第二连接端头,所述第二连接端头具有第二中心通孔,所述摇臂的顶端插设在所述第二中心通孔内,所述第二连接端头与所述旋转阻尼铰链同轴固定连接。
15.所述操作控制台包括操作面板和工业触摸屏,所述操作面板连接于所述十字连接座的水平部,所述工业触摸屏可水平转动地连接于所述十字连接座的竖直部顶端上。
16.所述工业触摸屏通过旋转阻尼铰链可水平转动地连接于所述十字连接座的竖直部顶端上。
17.所述操作面板可上下翻转地连接于所述十字连接座的水平部。
18.与现有技术相比,本实用新型具有以下优点和积极效果:
19.本实用新型数控多轴机床模拟装置,摇臂与装置主体通过第一连接组件转动连接,第一连接组件包括固定部件和转动部件,固定部件包括上下间隔设置的固定顶板和固定底板,转动部件包括上下间隔设置的转动顶板和转动底板,通过固定顶板与转动顶板转动连接,固定底板和转动底板转动连接,从而实现转动部件和固定部件的转动连接,也即摇臂和装置主体的转动连接是通过第一连接组件上下两处转动连接结构实现,支撑强度高,稳定性好,可有效抵抗摇臂所受弯矩作用,则无需额外设置支撑轮支撑摇臂也能保证摇臂顺畅转动,从而简化整机结构;同时,摇臂无需设置支撑轮支撑,则整机放置时只需保证装置主体平稳放置即可,方便使用;另外,固定部件和转动部件上设有相互配合的限位结构,用于当摇臂相对装置主体转动到位时限制摇臂继续转动,从而使摇臂可以稳固地固定在某
一位置,提高使用可靠性。
附图说明
20.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
21.图1为本实用新型数控多轴机床模拟装置立体图;
22.图2为本实用新型数控多轴机床模拟装置省略第一连接组件安装处壳体后的立体图;
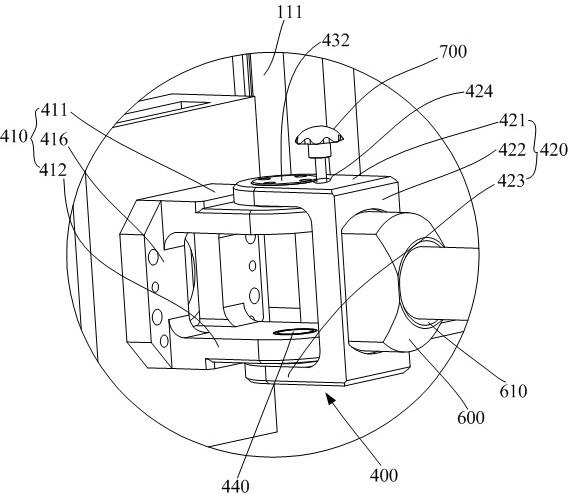
23.图3为图2的a部放大图;
24.图4为本实用新型数控多轴机床模拟装置的第一连接组件中固定部件的立体图;
25.图5为本实用新型数控多轴机床模拟装置的第一连接组件中轴套及转轴配合立体图;
26.图6为本实用新型数控多轴机床模拟装置的摇臂顶端与操作控制台连接处立体图;
27.图7为本实用新型数控多轴机床模拟装置的摇臂顶端与操作控制台连接处省略盖板后立体图。
28.附图标记:100、装置主体;110、箱体;111、内部框架;112、箱壳;200、操作控制台;210、操作面板;220、工业触摸屏;230、悬臂;231、调节孔;240、限位部件;250、盖板;300、摇臂;310、水平部;320、竖直部;330、下弯弧形部;400、第一连接组件;410、固定部件;411、固定顶板;412、固定底板;413、上安装孔;414、下安装孔;415、第一限位孔;416、固定侧板;420、转动部件;421、转动顶板;422、转动底板;423、转动侧板;424、第二限位孔;430、上转动配合组件;431、上轴套;432、上转动轴;440、下转动配合组件;500、第二连接组件;510、旋转阻尼铰链;520、十字连接座;521、竖直部;522、水平部;530、旋转阻尼铰链;600、第一连接端头;610、第一中心通孔;700、限位销轴;800、第二连接端头;810、第二中心通孔。
具体实施方式
29.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
30.此外,下面所描述的本实用新型不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
31.参照图1至图7,本实施例一种数控多轴机床模拟训练装置,包括装置主体100、操作控制台200和摇臂300,摇臂300的底端通过第一连接组件400可转动地连接于装置主体100,摇臂300的顶端通过第二连接组件500可转动连接于操作控制台200;第一连接组件400包括固定部件410和转动部件420,固定部件410固设在装置主体100的底部处,其包括上下间隔设置的固定顶板411和固定底板412,转动部件420固设在摇臂300的底端上,其包括上
下间隔设置的转动顶板421和转动底板422,固定顶板411和转动顶板421可转动连接,固定底板412和转动底板422可转动连接,且固定部件410和转动部件420上设有相互配合的限位结构,用于当摇臂300相对装置主体100转动到位时限位摇臂300继续转动。
32.本实施例中,将摇臂300与装置主体100转动连接的第一连接组件400包括固定部件410和转动部件420,固定部件410包括上下间隔设置的固定顶板411和固定底板412,转动部件420包括上下间隔设置的转动顶板421和转动底板422,通过固定顶板411与转动顶板421转动连接,固定底板412和转动底板422转动连接,从而实现转动部件420和固定部件410的转动连接,也即摇臂300和装置主体100的转动连接是第一连接组件400的上下两处转动连接结构实现,支撑强度高,稳定性好,有效抵抗摇臂300所受弯矩作用,则无需额外设置支撑轮支撑摇臂300也能保证摇臂300顺畅转动,从而简化整机结构;同时,摇臂300无需设置支撑轮支撑,则整机放置时只需保证装置主体100平稳放置即可,方便使用;另外,固定部件410和转动部件420上设有相互配合的限位结构,用于当摇臂300相对装置主体100转动到位时限制摇臂300继续转动,从而使摇臂300可以稳固地固定在某一位置,提高使用可靠性。
33.具体地,装置主体100包括箱体110、工业显示器、设备开关、报警灯、扶手和设在箱体底部的多个脚轮等,箱体110由内部框架111和箱壳112构成,内部框架111位于箱壳112的内部,内部框架111为箱体110的主要承力结构,箱壳112主要为钣金外观件,则固定部件410具体固连于内部框架111上,以提高连接强度。优选地,本实施例中固定部件410和转动部件420为钢质机加工件,强度高,不易变形,从而对摇臂300的支撑强度过高。
34.进一步地,作为一种具体的实施方式,如图2至图5所示,本实施例中固定顶板411和转动顶板421通过上转动配合组件430可转动连接,上转动配合组件430包括上轴套431和上转动轴432,固定顶板411上设有上安装孔413,上轴套431与上安装孔413过盈配合,上转动轴432与转动顶板421固定连接,上转动轴432与上轴套431间隙配合;同理,固定底板412和转动底板422通过下转动配合组件440可转动连接,下转动配合组件440的结构部件同上转动配合组件430,只是在名称上加以区分,下转动配合组件440包括下轴套和下转动轴,固定底板412上设有下安装孔414,下轴套与下安装孔414过盈配合,下转动轴与转动底板422固定连接,下转动轴与下轴套间隙配合。
35.优选地,上转动配合组件430和下转动配合组件440同轴线,使得摇臂300和装置主体100的转动连接虽然是在第一连接组件400设置上下两处转动连接结构,但摇臂300的转动轴线仍为一条,防止上下两处转动连接结构的转动轴线错开易导致摇臂300转动卡滞的问题,保证摇臂300转动顺畅性。
36.进一步地,本实施例中摇臂300为一体成型的不锈钢管,其包括水平部310、位于水平部310上方的竖直部320和连接水平部310及竖直部320的下弯弧形部330,摇臂300的底端上焊接有与其同轴设置的第一连接端头600,第一连接端头600具有第一中心通孔610,摇臂300的底端插设在第一中心通孔610内,转动部件420具有连接转动顶板421和转动底板422的转动侧板423,第一连接端头600与转动侧板423螺钉连接,固定部件410具有连接固定顶板411和固定底板412的固定侧板416,固定侧板416与装置主体100螺钉连接。固定部件410和转动部件420呈相对设置的横置u形结构且部分搭接。摇臂300为一体成型的不锈钢管,强度高,进一步减小了摇臂300由于弯矩作用导致的变形;同时,第一连接端头600优选钢质材料,与摇臂300的底端焊接连接,进一步也提高摇臂300的连接强度。
37.本实施例中,对于限位结构,如图3和图4所示,其包括一限位销轴700、设在固定顶板411上的多个第一限位孔415、设在转动顶板421上的一第二限位孔424,限位销轴700与第二限位孔424及其中任一第一限位孔415插设配合,从而限制摇臂300的转动自由度。多个第一限位孔415沿圆弧均布,通过选择不同的第一限位孔415与第二限位孔424及限位销轴700配合,可以实现摇臂300转动至不同位置处均能可靠限位。
38.对于第二连接组件500,如图6和图7所示,包括旋转阻尼铰链510(也称旋转扭矩铰链或圆盘阻尼转轴)和十字连接座520,旋转阻尼铰链510连接摇臂300的顶端和十字连接座520的竖直部521的底端,使十字连接座520可相对摇臂300水平转动,操作控制台200安装在十字连接座520上,从而使得操作控制台200可相对摇臂300水平转动,以改变操作控制台200的位置,方便用户使用。旋转阻尼铰链510即可实现旋转,又有一定的阻尼力,比如手动旋转操作控制台200到需要的位置时,操作控制台200能够保持在此位置。
39.为进一步提高支撑强度,摇臂300的顶端上焊接有与其同轴设置的第二连接端头800,第二连接端头80具有第二中心通孔810,摇臂300的顶端插设在第二中心通孔810内,第二连接端头800与旋转阻尼铰链510(具体与旋转阻尼铰链510的固定部分)同轴固定连接,十字连接座520的竖直部521底端具体连接于旋转阻尼铰链510的转动部分。具体地,第二连接端头800优选钢质材料,与摇臂300焊接连接,进一步也提高摇臂300本身强度以及对操作控制台200的支撑强度;同时,十字连接座520为一钢质焊接件,强度高。
40.操作控制台200包括操作面板210和工业触摸屏220,操作面板210连接于十字连接座520的水平部522,板面朝向以便于操作,工业触摸屏220面向用户,工业触摸屏220可水平转动地连接于十字连接座520的竖直部521的顶端上,以使工业触摸屏220可绕竖直轴线转动,使其可处于不同的位置,提高了使用灵活性。在本实施例操作控制台200即可实现整体水平转动,又可实现工业触摸屏单独绕竖直轴线转动,提高了操作控制台200的使用灵活性。本实施例中操作控制台200为两套,以分别适应一套操作系统。
41.具体地,如图7所示,工业触摸屏220通过旋转阻尼铰链530可水平转动地连接于十字连接座520的竖直部521顶端上。
42.进一步地,操作面板210可上下翻转地连接于十字连接座520的水平部522,即操作面板210的俯仰角度可调,进一步方便了使用。如图6和图7所示,操作面板210与十字连接座520的水平部522之间连接有左右两悬臂230,悬臂230的一端固连于操作面板210,另一端套设在十字连接座520的水平部522上且可转动地连接于十字连接座520的水平部522,各悬臂230的左右两侧均设置限位部件240以防止悬臂230左右晃动,悬臂230周向上可设置多个调节孔231,当悬臂230带动操作面板210上下翻转至合适角度后通过在调节孔231内安装弹簧柱塞的方式将悬臂230定位,进而将操作面板210定位。
43.为保证美观及使用安全,两悬臂230固连有盖板250以覆盖两悬臂230及两悬臂230之间的结构部件,如图6所示。
44.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1