显示控制装置、平视显示装置的制作方法
1.本发明涉及一种平视显示(head-up display:hud)装置、显示控制装 置等,其将图像的显示光投影(投射)到车辆的挡风玻璃、合成器等被投影 部件上,并在驾驶者的前方等显示虚像。
背景技术:
2.在hud装置中,已知一种图像校正处理(以下称为变形处理),其预 先使投影的图像变形,以具有与因光学系统、挡风玻璃等的曲面形状等而产 生的虚像的失真相反的特性。例如在专利文献1中记载了hud装置中的变 形处理。
3.另外,关于基于驾驶者的视点位置进行变形处理(视点追随变形),例 如记载在专利文献2中。
4.现有技术文献
5.专利文献
6.专利文献1:日本专利特开2015-87619号公报
7.专利文献2:日本专利特开2014-199385号公报
技术实现要素:
8.本发明者对实施根据驾驶者(操纵者、乘务员等,可广泛解释)的视点 位置更新变形参数的视点位置追随变形控制进行了研究,认识到以下记载的 新课题。
9.有时有如下情况:驾驶者的视点位置移动,hud装置暂时丧失该视点位 置后,再次检测视点位置,根据再次检测出的视点位置,更新变形参数。
10.在此,在变形处理后显示的图像(虚像)理想的是由光学系统等产生的 失真被完全校正而成为平面的虚像,在视点位置追随变形中,理想的是即使 在驾驶者(用户)的视点的位置变化时,也总是得到没有失真的虚像,但并 不能完全除去失真。
11.因此,在产生视点位置的丧失(丢失)后,若基于再次检测的视点位置 实施单纯的视点位置追随变形,则即使在显示相同图像的虚像的情况下,驾 驶者所观察到的虚像的外观(虚像的样子、从虚像接收到的印象等)也会瞬 时变化,有时有使驾驶者产生不协调感。
12.另外,作为视点丢失的方式,典型地可以设想视点因某些理由而移动到 视点区外,然后返回到视点区内的情况,但并不限定于此,也可以存在驾驶 者的视点在视点区内瞬时移动而产生的情况。即使视点丢失,其方式也是多 样的。根据需要,采用考虑了视点丢失的状况的对策也很重要。
13.而且,近年来,例如开发了能够在车辆前方的相当大的范围内进行虚像 显示的hud装置,这样的hud装置有大型化的倾向。虽然对光学系统等的 设计进行了研究以减少失真,但是,例如,在视点区的整个区域中,实现一 律相同的失真减少效果是困难的,例如,也可以设想发生如下情况:当驾驶 者的视点位于视点区的中央区域时,能够相当地抑制失真的程度,但当视点 位于视点区的周边时,残留的失真的程度在某种程度上变大。这一点也
成为 使所述视点位置丧失后的基于变形处理的虚像的呈现方式大幅变化的一个原 因。
14.本发明的目的之一在于,在hud装置中,在实施视点位置追随变形处 理时,在实施根据驾驶者的视点位置更新变形参数的视点位置追随变形控制 时,在驾驶者的视点位置丧失,且其后再次检测视点位置的情况下,抑制图 像的外观伴随变形参数的更新而瞬时变化而使驾驶者产生不协调感。
15.本发明的其他目的通过参照以下例示的方式和最佳实施方式以及附图, 对本领域技术人员来说是显而易见的。
16.以下,为了容易理解本发明的概要,例示根据本发明的方式。
17.在第一方式中,显示控制装置具有:搭载在车辆上并显示图像的显示部; 和反射所述图像的显示光并投影到所述被投影部件上的光学部件,所述显示 控制装置对平视显示(hud)装置进行控制,该平视显示装置通过将所述图 像投影到所述车辆所具备的被投影部件上,从而使驾驶者视觉辨认所述图像 的虚像,
18.所述显示控制装置具有控制部,所述控制部用于实施根据驾驶者在视点 区中的视点位置来更新变形参数,并使用该变形参数来预先使显示在所述显 示部上的图像,以具有与所述图像的虚像的失真特性相反的特性的方式变形 的视点位置追随变形控制,
19.所述控制部在检测出所述驾驶者的左右的视点的至少一方的位置不明的 视点丢失时,在视点丢失期间,维持在所述视点丢失期间之前设定的变形参 数,
20.当在所述视点丢失期间之后再次检测所述视点的位置时,使使用了与再 次检测的视点位置对应的变形参数的至少一次变形处理无效化。
21.在第一方式中,在视点丢失(也有记载为视点丧失或视点位置丧失的情 况)期间,维持之前的变形参数,并且,在再次检测视点位置的时刻,不立 即实施基于新的变形参数的变形,而是延迟实施。
22.换而言之,控制部在视点丢失后再次检测视点位置时,使使用了与再次 检测的视点位置对应的变形参数的至少一次变形处理无效化(再次检测后的 无效化期间的设定),然后,使使用了与无效化期间结束后的视点位置对应 的变形参数的变形处理有效化(实施)。
23.例如,假设采用将视点区分割为多个部分区域,以各部分区域为单位检 测视点位置的方式的情况。例如,即使判明在视点丢失之前视点位于“部分 区域a”,发生视点丢失,之后,在再次检测视点位置的时刻,视点移动到
ꢀ“
部分区域b”,应用了与“部分区域b”的位置对应的变形参数的变形处 理也被无效化(至少一次无效化)。在视点位置从部分区域b进一步移动到 部分区域c时,也能够将应用了与该部分区域c的位置对应的变形参数的变 形处理再次无效化(第二次无效化)。
24.此外,也能够考虑视点丢失的方式(例如,视点丢失期间的长度)和车 辆的行驶状态(例如,车速)等而适当地决定多少次数无效化。
25.在从属于第一方式的第二方式中,
26.所述控制部在将所述视点丢失时间与阈值进行比较,所述视点丢失时间 比所述阈值短的情况下,
27.也可以实施如下控制:与所述视点丢失时间比所述阈值长的情况相比, 延长使所述变形处理无效化的期间。
28.在第二方式中,控制部对丢失了视点位置的时间(丢失时间或丧失时间) 进行计时,在丢失时间比规定的阈值短的情况下,实施使无效化的期间更长 的控制。
29.在第二方式中,通过将不变更变形参数而固定图像(虚像)的外观保持 一定的期间设定得更长,能够提示驾驶者视点丢失后的再次检测成功,并使 其认识到当前正在实施其对应处理。换而言之,通过延长变形参数的固定期 间并经过时间更新的变形参数来进行图像处理,即使在图像(虚像)的外观 发生变化的情况下,也使驾驶者认识到这种变化并不是随着驾驶者眼睛的移 动而突然产生的,而是时间上更加充裕的变化。
30.由此,驾驶者容易感知到,虽然由于眼睛的移动而发生了视点位置的丢 失,但是hud装置的系统成功地再次检测了视点位置,并且实施了与视点 丢失相对应的处理。
31.换而言之,在hud装置侧(系统侧),可以向作为用户的驾驶者显示 视点丢失后的处理被正确地实施。这给驾驶者带来安心感、精神上的稳定感, 从而达到不易产生不协调感或减轻不协调感的效果。
32.在从属于第一方式的第三方式中,
33.所述控制部在将所述视点丢失时间与阈值进行比较,所述视点丢失时间 比所述阈值短的情况下,
34.也可以实施如下控制:与所述视点丢失时间比所述阈值长的情况相比, 缩短使所述变形处理无效化的期间。
35.在第三方式中,控制部对视点位置的丢失时间(丧失时间)进行计时, 在丢失时间比规定的阈值短的情况下,实施使无效化的期间更短的控制。虽 然控制的方向与第二方式相反,但由于第二、第三各方式所得到的效果不同, 因此各方式能够根据所期待的效果选择性地应用。考虑到视点丢失时间较短 时,视点位置的变化较小(视点的移动距离比较短),因此与视点丢失时间 较长时相比,将通过新的变形参数的变形处理的无效化时间设定得较短。由 此,例如,在实施必要最小限度的无效化(时刻延迟)之后,迅速地显示与 视点位置对应的合适的变形校正后的图像(虚像),能够实现减轻不协调感、 抑制不协调感的产生。
36.换而言之,当视点丢失期间较短时,推定为视点位置的移动距离小,因 此,能够推定为在变形参数的更新的前后的虚像的失真的形态中很少存在较 大的差异,考虑到这一点,防止视点位置的再次检测之后的(换而言之,在 相当短的时间内的)虚像的外观的急剧变化,之后迅速地恢复到通常的视点 追随变形控制,由此能够可靠地获得视觉辨认的改善效果。
37.在从属于第一至第三方式中的任一方式的第四方式中,
38.所述控制部在将视点丢失发生之前和视点丢失期间的变形参数的更新周 期作为第一更新周期rt1,并且将无效化所述变形处理的期间的变形参数的 更新周期作为第二更新周期rt2时,可以将参数更新周期变更为rt1<rt2。
39.在第四方式中,在无效化期间,与维持视点丢失之前的参数的处理同时, 并用延长变形参数的更新周期的处理(变形参数的更新周期的变更处理)。
40.例如,如果图像(虚像)的帧速率是60fps(帧每秒),则在每秒内实施 60帧的图像处理(图像显示处理)(换而言之,一帧期间是1/60秒)。作 为一个例子,假设变形参数的更新也通常是对每一帧实施的情况。
41.在此,如果在视点丢失之后的无效化期间每两帧实施参数的更新,则更 新周期为2/60秒,另外,如果每三帧实施参数的更新,则更新周期为3/60 秒,从而让更新周期变长。这样,通过切换为以多个帧为单位的更新,可以 延长(增大)更新周期。由于更新周期变长,更新后的变形参数向图像(虚 像)的反映变慢。换而言之,更新后的参数反映在显示上的灵敏度会钝化。 若经过了无效化期间,变更后的参数的更新周期就会恢复到原来(从rt2恢 复到rt1),但是将更新周期恢复到原来在现实中不是瞬间完成的,需要一 定的时间,因此即使参数被切换,该切换后的参数在现实显示中的反映也会 延迟。
42.因此,适当地设置一定时间幅度的延迟(具有驾驶者能够感知到延迟现 实显示中的外观变化的程度的延迟(换而言之,有效地稍微延长无效化期间 的幅度的延迟))是容易的。也能够期待时刻控制电路的设计容易化等效果。
43.另外,可变地控制参数更新周期的增大程度,或者,在将增大的更新周 期恢复为原来时的时刻等方面进行研究等,从而控制的变形幅度扩大,灵活 的应对也成为可能。现实显示控制中的延迟量也容易设定得相当宽。
44.在从属于第四方式的第五方式中,
45.所述控制部在将所述变形更新周期从所述rt1变更为所述rt2之后,
46.在无效化所述变形处理的期间的结束时刻,从所述rt2恢复到所述rt1,
47.或者,
48.在从无效化所述变形处理的期间的结束时刻起进一步经过规定时间的时 刻,从所述rt2恢复到所述rt1,
49.或者,
50.可以以无效化所述变形处理的期间的结束时刻为起点开始参数更新周期 的变更,并且可以随着时间经过逐渐从所述rt2恢复到所述rt1。
51.在第五方式中,记载了在实施第四方式中的延长更新周期的处理之后将 该更新周期恢复到原来的方式的例子。
52.在第一个例子中,与变形参数的切换(更新)同步地,将较长的更新周 期恢复为原来的较短的更新周期。即使在这种情况下,更新周期的变更也需 要一定的时间,因此能够可靠地确保该部分的延迟。
53.在第二例中,在从变形参数的切换(更新)的时间点进一步经过规定时 间的时间点,将变形更新周期恢复到原来。在该示例中,恢复更新周期的时 刻比参数的切换(更新)时刻延迟规定时间,并且变更后的参数在显示上的 反映进一步延迟,从而容易可靠地实现人眼可感知的适当长度的延迟。
54.在第三例中,当将更新周期恢复到原来时,随着规定时间的经过逐渐地 将更新周期恢复到原来。换而言之,当将更新周期例如从1/15秒恢复到1/60 秒时,不立即恢复,而是以规定时间为单位,实施以1/30秒、1/45秒、1/60 秒为阶段地逐渐切换的方式的控制。通过在时间轴上逐渐切换更新周期的控 制,能够更高精度地管理反映到变更后的参数显示上的延迟。
55.在从属于第一至第五中的任一方式的第六方式中,
56.进一步具有判定所述车辆的速度是否为低速状态的低速状态判定部,
57.所述控制部使所述车辆为包含停止状态的所述低速状态时的所述变形处 理无效
化的期间,比使比所述低速状态快的状态下的所述变形处理无效化的 期间长。
58.在第六方式中,当车辆处于低速状态时,将无效化期间设定得比处于中 速状态、高速状态时长(换而言之,使切换变形参数的时刻更加延迟)。在 低速状态时,驾驶者对前方等视觉的变动敏感,并且容易察觉这种变动。因 此,此时,提供一种更大程度地延迟视点丢失后的新参数在图像上的反映, 不容易因显示的外观的瞬时变化而产生不协调感的对策。当车速离开低速状 态并且变快时,实施的控制侧重于减小无效化期间(能够包括消除无效化期 间的情况),并且基于丢失后再次检测的视点位置更快地校正图像的失真。 由此,能够对应车速进行适当的变形控制。
59.在从属于第一至第六中的任一方式的第七方式中,
60.所述控制部根据车辆的车速而变更无效化所述变形处理的期间,在这种 情况下,
61.实施如下控制:当所述车辆的速度在大于或等于第一速度值u1(u1>0) 且小于或等于比所述第一速度值大的第二速度值u2的范围内时,使无效化 变形处理的期间随着车速的增加而相对于车速减小,
62.或者,
63.实施如下控制:在车速接近所述第一速度值的范围内,所述减少的程度 变缓,随着车速远离第一速度值,加剧所述减少的程度,
64.或者,
65.也可以实施如下控制:在车速接近所述第一速度值的范围内,所述减少 的程度变缓,随着车速远离所述第一速度值,使所述减少的程度更加急剧, 并且随着车速接近所述第二速度值,所述减少的程度变缓。
66.在第七方式中,当对应车速的增加而实施缩短(换而言之,减少)无效 化变形处理的期间的情况下,当车速在大于或等于第一速度u1(>0)且小 于或等于比第一速度值大的第二速度值u2的范围内时,可以实施该控制(第 一控制)。在车速小于第一速度u1和超过第二速度u2的范围内不实施控制, 以避免对hud装置的系统造成过重的负担。另外,通过使无效化期间相对 于速度减少,能够进行与速度对应的更加灵活且恰当的变形处理。
67.另外,当处于驾驶者容易感觉到图像(虚像)的视觉变化的低速状态(换 而言之,车速处于接近第一速度值u1的范围内)的情况下,可以以抑制变 形参数的急速更新的方式,实施使无效化期间减小的程度变缓的控制(第二 控制)。在这种情况下,实现了更高精度的控制。
68.另外,除了上述第二控制之外,还可以实施随着接近第二速度值u2而 使无效化期间减少的程度变缓的控制(逆s形特性的控制),通过在达到第 二速度值u2时停止减少并使其成为一定,从而抑制变化急速(突然)到顶 而产生不协调感(第三控制)。因此,能够进一步改善虚像的视觉辨认。
69.在从属于第一至第七中的任一方式的第八方式中,
70.所述平视显示装置在根据所述驾驶者的所述视点的高度位置来调节所述 视点区的位置时,可以在不移动所述光学部件的情况下变更所述图像的显示 光在所述光学部件上的反射位置。
71.在第八方式中,在对应驾驶者的眼睛(视点)的高度位置来调整视点区 的高度位置的情况下,实施上述控制的hud装置不使用例如致动器来使将 光投影到被投影部件上的
光学部件转动,而是通过变更该光学部件中的光的 反射位置来应对。
72.近年来的hud装置,有以例如在车辆前方相当大的范围内显示虚像为 前提而开发的倾向,这种情况下,装置必然会变得大型化。当然,光学部件 也会大型化。当使用致动器等转动光学部件时,由于误差,反而可能导致视 点区的高度位置的控制精度降低,为了防止这种情况,通过变更由光学部件 反射的光线的位置来应对。
73.在这样的大型光学部件中,通过将其反射面作为自由曲面进行最佳设计 等,尽量使虚像的失真不明显化,但是,如上所述,例如在驾驶者的视点位 于视点区的周边的情况等下,有时有无论如何失真都明显化的情况。因此, 在这种情况下,通过实施控制以在规定范围内暂时无效化(延迟)与再次检 测之后的视点位置对应的参数的控制,能够使得难以产生由于虚像的失真引 起的外观的改变而导致的不协调感,并且能够有效地利用上述控制以提高视 觉辨认。
74.在从属于第一至第八中的任一方式的第九方式中,
75.与所述显示部的图像显示面对应的虚拟的虚像显示面被配置成与所述车 辆前方的路面重叠,
76.或者,
77.也可以以使所述虚像显示面的靠近上述车辆的一侧的端部即近端部与所 述路面的距离变小,而远离所述车辆的一侧的端部即远端部与所述路面的距 离变大的方式相对于所述路面倾斜地配置。
78.在第九方式中,以hud装置中的、配置在车辆前方等的虚拟的虚像显 示面(与作为显示部的屏幕等显示面对应)与路面重叠方式,或者相对于路 面倾斜地设置。前者有时被称为路面重叠hud,后者有时被称为倾斜面hud。
79.它们使用与路面重叠的较宽的虚像显示面或相对于路面倾斜地设置的较 宽的虚像显示面,例如在车辆前方5m~100m的范围内能够进行各种显示, hud装置大型化从而视点区也大型化,优选在比以往更宽的范围内高精度地 检测视点位置,进行使用了适当的变形参数的图像校正。但是,如果发生视 点丢失,则该高精度的变形参数的切换控制反而会使视点的再次检测后的图 像(虚像)的视觉辨认性降低。因此,本发明的控制方式的应用是有效的。
80.本领域技术人员应当容易理解的是,根据示例的本发明的方式可以在不 脱离本发明精神的情况下进一步改变。
附图说明
81.图1中的(a)是用于说明变形处理的概要及经过变形处理而显示的虚 像(及虚像显示面)的失真的方式的图,图1中的(b)是表示驾驶者经由 挡风玻璃视觉辨认的虚像的一个例子的图。
82.图2中的(a)是用于说明视点位置追随变形处理的概要的图,图2中 的(b)是表示将内部分割为多个部分区域的视点区的结构例的图。
83.图3中的(a)~(f)是表示变形处理后的失真方式不同的虚像的例子 的图。
84.图4是表示内部被分割为多个部分区域的视点区中的视点丢失以及视点 位置的再次检测的例子的图。
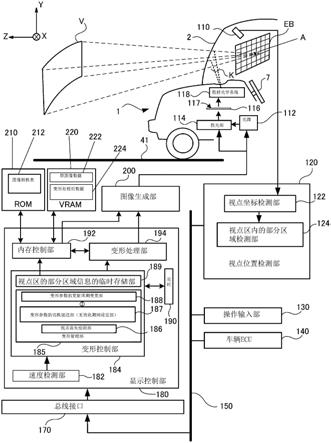
85.图5是表示hud装置的系统结构的一个例子的图。
86.图6中的(a)~(c)是表示设置使基于再次检测的视点位置的变形处 理无效化的期间的控制的一个例子的时序图。
87.图7中的(a)~(d)表示设置使基于再次检测的视点位置的变形处理 无效化的期间的控制的其他例子(并用参数更新周期的变更处理的情况)的 时序图。
88.图8中的(a)、(b)是表示设置使基于再次检测的视点位置的变形处 理无效化的期间的控制的另一个例子(视点丢失期间比阈值短的情况下的第 一控制例)的时序图。
89.图9中的(a)、(b)是表示设置使基于再次检测的视点位置的变形处 理无效化的期间的控制的另一个例子(视点丢失期间比阈值短的情况下的第 二控制例)的时序图。
90.图10是表示对应车速可变地控制使基于再次检测的视点位置的变形处 理无效化的期间的情况下的特性例的图。
91.图11是示出与视点丢失对应的变形图像校正控制的过程例(第一控制例) 的流程图。
92.图12是示出与视点丢失对应的变形图像校正控制的过程例(第二控制例) 的流程图。
93.图13是示出与视点丢失对应的变形图像校正控制的过程例(第三控制例) 的流程图。
94.图14中的(a)是表示根据路面重叠hud的显示例的图,图14中的(b) 是表示根据倾斜面hud的显示例的图,图14中的(c)是表示hud装置的 主要部分的结构例的图。
95.符号说明
[0096]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车辆(本车辆)
[0097]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
被投影部件(反射透光部件、挡风玻璃等)
[0098]4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
投影区域
[0099]5ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
虚像显示区域
[0100]7ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
方向盘
[0101]
51
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
显示光
[0102]
100
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
hud装置
[0103]
110
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
视点检测相机
[0104]
110、112
ꢀꢀꢀꢀꢀꢀꢀꢀ
光源
[0105]
114
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
投光部
[0106]
116
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
显示部
[0107]
117
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
显示面(图像显示面)
[0108]
118
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
投射光学系统
[0109]
120
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
视点位置检测部(视点位置判定部)
[0110]
122
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
视点坐标检测部
[0111]
124
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
视点区内的部分区域检测部
[0112]
130
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
操作部
[0113]
131
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
曲面镜(凹面镜等)
[0114]
133
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
反射镜(包括反射镜、校正镜等)
[0115]
140
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车辆ecu
[0116]
150
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
总线
[0117]
151
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光源部
[0118]
161
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
显示部(屏幕等)
[0119]
63
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
显示面(图像显示面)
[0120]
170
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
总线接口
[0121]
171
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制部
[0122]
173
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
驱动显示部的致动器
[0123]
180
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
显示控制部(显示控制装置)
[0124]
182
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
速度检测部
[0125]
184
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
变形控制部
[0126]
185
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
变形管理部
[0127]
186
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
视点丧失(视点丢失)检测部
[0128]
187
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
变形参数的切换延迟部(无效化期间设定部)
[0129]
188
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
变形参数的更新周期变更部
[0130]
189
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
视点区的部分区域信息的暂时存储部
[0131]
192
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
存储器控制部
[0132]
194
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
变形处理部
[0133]
200
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
图像生成部
[0134]
210
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
rom
[0135]
220
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
vram
[0136]
212
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
图像变换表
[0137]
222
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
图像(原图像)数据
[0138]
224
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
变形处理后的图像数据
[0139]
eb
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
视点区
[0140]
z(z1~z9等)
ꢀꢀꢀꢀꢀ
视点区的部分区域
[0141]
wp
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
变形参数
[0142]
ps
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
虚像显示面
[0143]vꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
虚像
具体实施方式
[0144]
以下说明的最佳实施方式是为了容易理解本发明而使用的。因此,本领 域技术人员应该注意本发明不被以下说明的实施方式不当限定。
[0145]
参照图1。图1中的(a)是用于说明变形处理的概要及经过变形处理而 显示的虚像(及虚像显示面)的失真的方式的图,图1中的(b)是表示驾 驶者经由挡风玻璃视觉辨认的虚像的一个例子的图。
[0146]
如图1中的(a)所示,hud装置100具有:显示部(例如,光透过型 的屏幕)101;反射镜103;和作为投影显示光的光学部件的曲面镜105(例 如也有为凹面镜,反射面为自由曲面的情况)。显示在显示部101上的图像 经过反射镜103、曲面镜105投影至作为被投影部件
的挡风玻璃2的虚像显 示区域5。在图1中,符号4表示投影区域。此外,hud100也可以设置多 个曲面镜,除了本实施方式的曲面镜(反射光学元件)之外,或者代替本实 施方式的镜(反射光学元件)的一部分(或者全部),也可以包含透镜等的 折射光学元件、衍射光学元件等的功能性光学元件。
[0147]
图像的显示光的一部分由挡风玻璃2反射,入射至位于预设的视点区eb (在此为规定面积的四边形的形状)的内部(或者eb上)的驾驶者等的视 点(眼睛)a,通过在车辆1的前方成像,从而在与显示部101的显示面102 对应的虚拟的虚像显示面ps上显示虚像v。
[0148]
显示部101的图像受曲面镜105的形状、挡风玻璃2的形状等的影响而 失真。为了抵消该失真,图像被赋予与该失真相反特性的失真。这种预失真 (前置失真)方式的图像校正在本说明书中称为变形处理或者变形图像校正 处理。
[0149]
通过变形处理,显示在虚像显示面ps上的虚像v理想的是成为没有弯 曲的平坦的图像,但例如在将显示光投影到挡风玻璃2上的较宽的投影区域 4上,并且将虚像显示距离设定为相当宽的范围的大型hud装置100等中, 不可否认会残留某种程度的变形,这是没有办法的。
[0150]
在图1的左上,用虚线表示的ps’表示未完全除去失真的虚像显示面, v’表示在该虚像显示面ps’上显示的虚像。
[0151]
另外,残留失真的虚像v的失真的程度或失真的方式根据视点a位于视 点区eb上的哪个位置而不同。hud装置100的光学系统是假定视点a位于 中央部附近而设计的,因此产生在视点a位于中央部附近时,虚像的失真比 较小,越靠近周边部,虚像的失真越大的倾向。
[0152]
图1中的(b)示出了驾驶者经由挡风玻璃2视觉辨认的虚像v的一个 例子。在图1中的(b)中,在具有矩形的外形的虚像v中,例如纵向五个, 横向五个,合计设置二十五个基准点(基准像素点)g(i、j)(在此,i、j 都是可取1~5的值的变量)。对于图像(原图像)中的各基准点,赋予基于 变形处理的、与在虚像v中产生的失真相反特性的失真,因此,理想的是, 其事先赋予的失真和现实中产生的失真相互抵消,理想的是,显示如图1中 的(b)所示的没有弯曲的虚像v。基准点g(i、j)的数量能够通过内插处 理等适当地增加。此外,在图1中的(b)中,符号7是方向盘。
[0153]
接着,参照图2。图2中的(a)是用于说明视点位置追随变形处理的概 要的图,图2中的(b)是表示将内部分割为多个部分区域的视点区的结构 例的图。在图2中,对与图1相同的部分标注相同的参照符号(这一点在以 后的图中也相同)。
[0154]
如图2中的(a)所示,视点区eb被分割为多个(在此为九个)部分区 域z1~z9,以各部分区域z1~z9为单位,检测驾驶者的视点a的位置。
[0155]
从hud装置100的投射光学系统118射出图像的显示光k,其一部分 被挡风玻璃2反射,入射到驾驶者的视点(眼睛)a。视点a在视点区内时, 驾驶者能够视觉辨认图像的虚像。
[0156]
hud装置100具有rom210,rom210内置图像变换表212。图像变换 表212例如存储有用于决定基于数字滤波器的图像校正(变形图像校正)的 多项式、乘数、常数等的变形参数wp。变形参数wp与视点区eb中的各 部分区域z1~z9的各个对应设置。在图2中的(a)中,与各部分区域对应 的变形参数表示为wp(z1)~wp(z9)。此外,图中,作为符号,仅示出 wp(z1)、wp(z4)、wp(z7)。
[0157]
在视点a移动的情况下,检测该视点a位于多个部分区域z1~z9中的 哪个位置。然后,从rom210读取与检测到的部分区域对应的变形参数wp (z1)和wp(z9)中的一个(变形参数的更新),并且使用该变形参数实 施变形处理。
[0158]
图2中的(b)示出了部分区域的数量比图2中的(a)的例子增加了的 视点区eb。视点区eb被分割为纵向六个、横向十个,合计六十个部分区域。 各部分区域将x方向、y方向的各坐标位置作为参数,显示为z(x、y)。
[0159]
接着,参照图3。图3中的(a)~(f)是表示变形处理后的失真方式 不同的虚像的例子的图。如上所述,根据驾驶者的视点a位于视点区的位置 不同,变形处理后的虚像v的外观不同。
[0160]
如图3中的(a)所示,在挡风玻璃2的虚像显示区域5显示的虚像v 理想的是以除去失真而没有弯曲的形态显示。但是,在实际的虚像v中,即 使在实施了变形处理后也残留有失真,该失真的程度、形态对应视点a的位 置而变化。
[0161]
在图3中的(b)的例子中,虽然有失真,但是是比较轻度的失真,虚 像v是接近图3中的(a)的外观。在图3中的(c)的例子中,可以说变 形的倾向与图3中的(b)相同,但失真的程度变大,不能说是与图3中的 (a)相同的外观。
[0162]
另外,在图3中的(d)的例子中,失真的程度与图3中的(c)相同, 但失真的形态(失真的倾向,或产生失真后的虚像的外观的形态)与图3中 的(c)不同。
[0163]
在图3中的(e)的例子中,失真的程度更大,虚像v的左右也没有取 得平衡。在图3中的(f)的例子中,虚像v是与图3中的(e)相似的倾向 的失真方式,但外观与图3中的(f)有很大不同。
[0164]
这样,即使是显示相同内容的虚像v(变形处理后的虚像v),对应视 点a的位置,其观察方式也相当不同。例如,当视点a位于视点区的中央部 时,视觉辨认的虚像v如图3中的(b)所示,失真比较少,但当视点a从 中央部向周边部移动时,例如如图3中的(e)所示,失真比较大。
[0165]
在这种状态下(视点a位于视点区的周边部的一个部分区域中的状态图 3中的(e)的情况),例如,假设视点a移动到其它部分区域,例如,虚 像v的外观如图3中的(b)所示那样变化的情况(变化a1),或如图3中 的(f)所示那样变化(变化a2)的情况,无论哪种情况,外观都发生了相 当大的变化,增加了驾驶者(用户)产生不协调感的可能性。
[0166]
接着,参照图4。图4是表示内部被分割为多个部分区域的视点区中的 视点丢失以及视点位置的再次检测的例子的图。在图4中,作为在产生了视 点丢失之后再次检测视点位置的方式,例示了(1)~(6)的各视点移动。
[0167]
视点丢失的典型的例子是在驾驶中驾驶者的视点a从视点区eb偏离而 其位置的检测中断,然后视点a返回到视点区eb内的情况。在图4中,作 为此时的视点移动的方式,例示了(1)~(6)的移动。视点移动(1)是视 点a从视点区eb的中央区域ct的内部向视点区eb外的移动,移动距离 长,视点的丢失时间也长。在这种情况下,在视点a返回到视点区eb内的 情况下,可以设想变为例如经过(2)、(3)的移动而停留在(4)那样的不 稳定(变动多)。
[0168]
另外,如视点移动例(5)、(6)那样,在视点a不在视点区eb之外, 但在多个部分区域中瞬时移动的情况下等也会产生视点丢失。在视点移动例 (5)、(6)中,与上述(1)~(4)的移动方式相比,移动距离短,视点 的损失时间也短,另外,视点移动也比较稳定。视点丢
失的方式有多种,希 望灵活地应对。
[0169]
在本实施方式中,基本上采用如下对策:在发生视点丢失(视点丧失) 的期间,维持之前的变形参数,从再次检测视点a的时刻开始无效化期间, 在无效化期间,使使用了与再次检测的视点位置对应的变形参数的至少一次 变形处理无效化。在无效化期间,维持视点丢失之前的变形参数。
[0170]
此外,在视点丢失期间,也可以设想采用与视点区eb的中心(符号cp) 的位置相当的变形参数,但在该情况下,参数是从视点丢失之前的参数暂时 转移到与中心cp对应的参数,然后转移到与再次检测后的位置对应的参数 的阶段性处理,由于变形参数的切换导致虚像的外观改变的可能性高,因此 在本实施例中不采用。如上所述,在视点丢失期间,接着的无效化期间中, 通过维持视点丢失之前的变形参数,实施抑制虚像的外观变化的控制。通过 将无效化期间设为适当的长度,例如,能够仅使伴随图4的视点移动(2)之 后的视点a的再次检测的变形为无效,或者,还能够使伴随视点移动(3) 之后的视点a的再次检测的变形为无效(例如,图6、图7的例子)。
[0171]
另外,在无效化期间,也能够并用变形参数的更新周期的变更处理(延 长更新周期的处理)。另外,此时,也能够进行使增大参数更新周期的期间 在无效化期间结束后也继续一段时间的应用处理,另外,在将该更新周期恢 复到原来时,也能够并用随着时间经过逐渐恢复的应用处理(图7(a)~(d) 的例子)。
[0172]
另外,也可以根据视点丢失期间是长于阈值(比较判定用的阈值)还是 短于阈值来可变地控制无效化期间。例如,在基于图4的视点移动(5)的视 点丢失(视点的移动比较短的丢失)后,能够将进行了视点的再次检测这一 情况演示给驾驶者(用户)而给予安心感(图8的例子),或者,相反地, 也能够比较快地结束无效化,迅速地进行基于与移动后的视点位置对应的参 数的变形处理,抑制冗长的无效化期间(图9的例子)。另外,也可以通过 使无效化期间根据车速变化,实施基于车速的适应性的控制(图10的例子)。 这些内容的详细情况在后面叙述。
[0173]
接着,参照图5。图5是表示hud装置的系统结构的一个例子的图。在 车辆1上设置有检测驾驶者的视点a(眼睛、瞳孔)的位置的视点检测相机 110。另外,在车辆1上设置有操作输入部130,以使驾驶者能够对hud装 置100设定必要的信息等,另外,设置有能够收集车辆1的各种信息的车辆 ecu140。
[0174]
另外,hud装置100具有:光源112、投光部114、投射光学系统118、 视点位置检测部(视点位置判定部)120、总线150、总线接口170、显示控 制部180、图像生成部200、内置图像变换表212的rom210、和存储图像 (原图像)数据222且暂时存储变形处理后的图像数据224的vram220。 显示控制部(显示控制装置)180由一个或多个处理器、一个或多个图像处 理电路、以及一个或多个存储器等构成,通过实施存储在所述存储器中的程 序,能够进行例如生成和/或发送图像数据等hud装置100(显示部116)的 控制。处理器和/或图像处理电路可以包含至少一个通用微处理器(例如,中 央处理装置(cpu))、至少一个面向特定用途集成电路(asic)、至少一 个现场可编程门阵列(fpga)或它们的任意组合。存储器包括硬盘那样的 任意类型的磁介质、cd及dvd那样的任意类型的光学介质、易失性存储器 那样的任意类型的半导体存储器及非易失性存储器。易失性存储器可以包括 dram和sram,非易失性存储器可以包括rom和nvram。
[0175]
视点位置检测部120具有视点坐标检测部122和基于检测出的坐标来检 测(判定)视点a位于视点区内的哪个部分区域的视点区的部分区域检测部 124。
[0176]
另外,显示控制部180具有:检测(判定)车辆1的速度的速度检测部 182(兼作判定低速状态的低速状态判定部)、变形控制部184(具备变形管 理部185)、计时器190、存储器控制部192、和变形处理部(变形图像校正 处理部)194。
[0177]
另外,变形管理部185具备:检测产生了视点丧失(视点丢失)的情况 的视点丧失检测部186(或者视点丢失检测部);变形参数的切换延迟部(无 效化期间设定部)187;变形参数的更新周期变更部188;以及暂时存储与检 测出的视点位置对应的视点区的部分区域信息的视点区的部分区域的暂时存 储部189。
[0178]
在此,当视点丢失后视点位置最初被再次检测时,变形参数的切换延迟 部187(无效化期间设定部)不在该时刻立即进行基于再次检测的视点位置 的变形参数的切换,而是暂时使变形参数的切换延迟,由此实施使变形参数 的切换无效化的控制。
[0179]
另外,变形参数的更新周期变更单元188与基于变形参数的切换时刻的 延迟的无效化期间的设定处理并行,实施至少在无效化期间中变更变形参数 的更新周期(具体地,延长更新周期)的控制。通过该更新周期的变更,例 如能够适当地延迟更新后的变形参数向实际的显示的反映时刻。
[0180]
基本动作如下。即,实施以下动作:将从视点位置检测部120发送来的 部分区域信息(表示视点a位于视点区的哪个部分区域的信息)用作地址变 量,存储器控制部192访问rom210,并读出对应的变形参数,变形处理部 (变形图像校正处理部)194使用所读出的变形参数,对原图像实施变形处 理,基于变形处理后的数据,由图像生成部200生成规定格式的图像,并将 该图像供给至例如光源112、投光部114等。
[0181]
但是,如果简单地追踪视点a的移动来进行变形,则如上所述,在视点 丢失后再次检测视点位置的情况下,虚像v的外观会瞬时变化,存在使驾驶 者产生视觉上的不协调感的情况,因此实施有意地使变形处理的灵敏度变钝 (抑制)的控制。该控制有几种方式。以下,按顺序进行说明。
[0182]
参照图6。图6中的(a)~(c)是表示设置使基于再次检测的视点位 置的变形处理无效化的期间的控制的一个例子的时序图。如图6中的(a) 所示,在时刻t10~t11的期间,视点a的位置位于视点区eb的部分区域z (n、m)(n、m是确定视点区内的部分区域的自然数),在时刻t11~t12 产生视点丧失(视点丢失),之后,在时刻t12,再次检测视点a位于视点 区eb的部分区域z(r、s)(其中,r、s是确定视点区内的部分区域的自然 数,这里所确定的部分区域与z(n、m)不同)。此外,视点丧失期间(视 点丢失期间)标记为t0。
[0183]
另外,如图6中的(c)所示,在本实施方式中,将变形参数的更新周 期的值固定为rt1,不进行变更。
[0184]
如图6中的(b)中实线所示,在视点丢失期间(时刻t11~t12),变形 参数维持视点丢失发生之前的参数值wp1。作为代替方案,如虚线所示,也 可以考虑将视点丢失期间的参数值维持为与视点区eb的中心位置对应的值, 但在该情况下,在视点丢失期间驾驶者也观察虚像的情况下,存在伴随参数 值的变更而虚像的外观变化从而产生不协调感的情况,因此不采用该代替方 案。
[0185]
另外,在时刻t12,再次检测视点a的位置,但不立即进行向与再次检 测的位置对
应的参数的切换,在从再次检测时刻t12起的规定期间(这里, 到时刻t13为止的期间),维持参数值wp1,在时刻t13,参数值被变更为 基于再次检测的位置的值wp2。时刻t12~t13的期间是无效化期间ta,在 该无效化期间ta内,视点位置被再次检测至少一次时,基于该再次检测的 位置的参数的变更(参数的应用)被无效化,实施使用了所维持的原来的参 数的变形。
[0186]
通过设置无效化期间,参数被固定一小段时间,不进行瞬间的变形参数 的切换。另外,在该无效化期间,即使视点位置不稳定,例如通过视点区的 多个部分区域而移动,也不进行基于视点位置的连续的再次检测的参数的变 更。由此,变形处理稳定化。因此,例如,驾驶者的视点a离开了视点区后 再次返回到视点区内时,能够抑制虚像v的外观瞬间变化而产生不协调感的 情况。
[0187]
接着,参照图7。图7中的(a)~(d)是表示设置使基于再次检测的 视点位置的变形处理无效化的期间的控制的其他例子(并用参数更新周期的 变更处理的情况等)的时序图。
[0188]
如图7中的(a)所示,在时刻t1~t3,发生视点丧失(视点丢失)。 视点丧失期间(视点丢失期间)标记为t1。另外,如图7中的(a)所示, 视点丢失期间t1在与规定的阈值(用于判定视点丢失期间的长短的阈值) th进行比较时,大于或等于阈值th。换而言之,在图7的例子中,th≤t1 成立(其中,在图7中的(a)中,作为具体例,表示了th《t1的情况)。
[0189]
另外,如图7中的(b)所示,时刻t3~t4是无效化期间ta。变形参数 wp1可以存在瞬时(在时间t4)切换到wp2的情况,或者如虚线的特征线 tk1或tk2所示,存在随着时间逐渐切换的情况。此外,tk1、tk2与图7 中的(d)的特性线g1、g2对应(后述)。在实施特性线tk1、tk2这样的 参数的切换时,参数值向wp2的切换完成的时刻成为从时刻t4进一步延迟 了时间(期间)tb的时刻即时刻t5(这一点也在后面叙述)。
[0190]
另外,在图7的例子中,也提及变更变形参数的更新周期的处理。图7 中的(c)表示将变形参数的更新周期固定为rt1,不进行更新周期的变更 的情况。图7中的(d)在时刻t3~t4的无效化期间ta中,实施(并用)将 变形参数的更新周期从rt1变更为rt2(具体而言,延长更新周期)这样的 变形参数的更新周期的变更处理。
[0191]
例如,如果图像(虚像)的帧速率是60fps(帧每秒),则在每秒内实施 60帧的图像处理(图像显示处理)(换而言之,一帧期间是1/60秒)。作 为一个例子,假设变形参数的更新也通常是对每一帧实施的情况。
[0192]
在此,如果在视点丢失之后的无效化期间每两帧实施参数更新,则更新 周期为2/60秒,另外,如果每三帧实施参数更新,则更新周期为3/60秒, 从而更新周期变长。这样,通过切换为以多个帧为单位的更新,可以延长(增 大)更新周期。由于更新周期变长,更新后的变形参数向图像(虚像)的反 映变慢。换而言之,更新后的参数反映在显示上的灵敏度会钝化。若经过了 无效化期间,变更后的参数的更新周期就会恢复到原来(从rt2恢复到rt1), 但是将更新周期恢复到原来在现实中不是瞬间完成的,需要一定的时间,因 此即使变形参数被切换,该切换后的参数在现实显示中的反映也会延迟。
[0193]
因此,适当地设置一定时间幅度的延迟(具有驾驶者能够感知到延迟现 实显示中的外观变化的长度的延迟(换而言之,有效地稍微延长无效化期间 的幅度的延迟))是容易的。还能够期待时刻控制电路的设计容易化等效果。
[0194]
另外,可变地控制参数更新周期的增大程度,或者,在将增大的更新周 期恢复为原来时的时刻等方面进行研究等,从而控制的变形幅度扩大,灵活 的应对也成为可能。现实显示控制中的延迟量也容易设定得相当宽。
[0195]
图7中的(d)示出了将增大后的更新周期恢复到原来时的时刻的变形 例。在图7中的(d)中,如虚线(粗线)的特性线g1所示,也可以将使更 新周期恢复的时刻从时刻t4变更为时刻t5。在该情况下,对参数的显示的反 映的灵敏度钝化的期间延长。在该情况下,除了延迟参数的切换而设置无效 化期间之外,还延迟将更新周期恢复为原来的(从rt2恢复为rt1)时刻, 进一步延迟更新后的参数在现实的显示中的反映,由此生成必要的延迟变得 更容易,减轻时刻电路等的负担。
[0196]
另外,在图7中的(d)中,如虚线(细线)的特性线g2所示,从时刻 t4开始恢复更新周期的处理,但之后,也可以具有时间上的富余,一点一点 地使更新周期恢复。例如,在将参数更新周期从1/15秒(=rt2)返回到1/60 秒(=rt1)时,不立即返回,而是实施以规定时间为单位阶段性地逐渐切换 为1/30秒、1/45秒、1/60秒的控制。通过在时间轴上逐渐切换更新周期的控 制,能够更高精度地管理反映到变更后的参数显示上的延迟。
[0197]
接着,参照图8。图8中的(a)、(b)是表示设置使基于再次检测的 视点位置的变形处理无效化的期间的控制的另一个例子(视点丢失期间比阈 值短的情况下的第一控制例)的时序图。
[0198]
在图8的例子中,控制部(图5中的符号184或185)例如使用计时器 190对丧失视点的视点丢失时间(视点丢失时间:在某些情况下被简称为丢 失时间)进行计时,并且在视点丢失时间短于预定阈值th的情况下实施控 制,使得进行无效化的期间(无效化期间)长于丢失时间比阈值th长的情 况(例如,图7的示例)。
[0199]
在图8中,视点丢失时间t10(时刻t1~t6)小于阈值th。视点丢失在 时刻t1发生,在时刻t6再次检测视点a的位置。在先前说明的图7的例子 中,在再次检测之后设置无效化期间ta,但在图8的例子中,无效化期间进 一步延长期间td。无效化期间为te(=ta+td)的期间。
[0200]
通过将不改变变形参数而固定并将图像(虚像)的外观保持一定的期间 设定得更长,能够提示驾驶者视点丢失后的再次检测成功,并使其认识到当 前正在实施其对应处理。换而言之,通过延长变形参数的固定期间并经过时 间更新的变形参数来进行图像处理,即使在图像(虚像)的外观发生变化的 情况下,也使驾驶者认识到这种变化并不是随着驾驶者眼睛的移动而突然产 生的,而是时间上更加充裕的变化。
[0201]
由此,驾驶者容易感知到,虽然由于自身的眼睛的移动而发生了视点位 置的丢失,但是hud装置的系统成功地再次检测了视点位置,并且实施了 与视点丢失相对应的处理。
[0202]
换而言之,在hud装置侧(系统侧),可以向作为用户的驾驶者演示 视点丢失后的处理被正确地实施。这给驾驶者带来安心感和精神上的稳定感, 从而达到不易产生不协调感或减轻不协调感的效果。
[0203]
接着,参照图9。图9中的(a)、(b)是表示设置使基于再次检测的 视点位置的变形处理无效化的期间的控制的另一个例子(视点丢失期间比阈 值短的情况下的第二控制例)的时序图。
[0204]
在图9的例子中,控制部(图5中的符号184或185)例如使用计时器 190对丧失视点的视点丢失时间(视点丢失时间:在某些情况下被简称为丢 失时间)进行计时,并且在视点丢失时间短于预定阈值th的情况下实施控 制,使得进行无效化的期间(无效化期间)短于丢失时间比阈值th长的情 况(例如,图7的例子)。图9中的控制方向与图8的情况相反。但是,由 于所得到的效果不同,因此图8、图9的各例能够根据期待的效果选择性地 应用。
[0205]
在视点丢失时间较短时,考虑到视点位置的变化较小(视点的移动距离 较短),因此在图9的例子中,与视点丢失时间比阈值th长时(图7的例 子)相比,将根据新的变形参数的变形处理的无效化时间设定得较短。如图 9中的(b)所示,在时刻t9,变形参数从wp1切换到wp2。时刻t6~t9的 期间tf成为无效化期间。图9的无效化期间tf设定为比图7的无效化期间 ta短。
[0206]
由此,例如,在实施必要最小限度的无效化(时刻延迟)之后,迅速地 显示与视点位置对应的合适的变形校正图像(虚像),能够实现减轻不协调 感、抑制不协调感的产生。
[0207]
换而言之,当视点丢失期间较短时,推定为视点位置的移动距离小,因 此,能够推定为在变形参数的更新的前后的虚像的失真的形态中很少存在较 大的差异,考虑到这一点,防止视点位置的再次检测之后的(换而言之,在 相当短的时间内的)虚像的外观的急剧变化,之后迅速地恢复到通常的视点 追随变形控制,能够可靠地获得视觉辨认的改善效果。
[0208]
接着,参照图10。图10是表示对应车速可变地控制使基于再次检测的 视点位置的变形处理无效化的期间的情况下的特性例的图。在图10的例子中, 根据车辆1的车速自适应地控制视点丢失后的无效化期间。
[0209]
先前说明的图5的速度检测部182也作为低速状态判定部发挥功能。当 通过该低速信息判定部182判定为车辆1处于低速状态(停止状态,或者低 速行驶状态)时(例如,使用车速判定用的阈值进行判定),控制部(184、 185)进行如下控制:使根据新参数的变形处理无效化的期间(无效化期间) 比快于低速状态的状态下的无效化期间长。
[0210]
在图10中,车速为0~u1的低速状态时的无效化期间ta、te、tf(分 别与图7中的(b)、图8、图9对应)的值为n1,在u1~u2的中速状态 下,该值小于n1,在车速为大于或等于u2的高速状态下也同样。
[0211]
在低速状态下,驾驶者(用户)对前方等视觉的变动敏感,并且容易察 觉这种变动。因此,此时,提供一种更大程度地延迟视点丢失后的新参数在 图像上的反映,不容易因显示外观的瞬时变化而产生不协调感的对策。当车 速离开低速状态并且变快时,实施的控制侧重于减小无效化期间ta、te、tf (能够包括消除无效化期间的情况),并且基于丢失后再次检测的视点位置 更快地校正图像失真。由此,能够对应车速进行更灵活、适当的变形控制。
[0212]
另外,在图10的控制例中,控制部(图5的符号184或者185)对应车 辆1的车速变更无效化变形处理的期间(无效化期间),在这种情况下,当 车辆1的速度大于或等于第一速度值u1(u1》0),并且小于或等于比第一 速度值大的第二速度值u2的范围内时,实施控制以使无效化变形处理的期 间(无效化期间)随着车速加快而相对于车速减少(由特性线q2、q3、q4 表示的控制,此为第一控制)。另外,这时,在车速小于第一速度u1以及 超过第二速度u2的范围内不实施控制,将无效化期间的值固定为n1或n2。 由此,能够不赋予hud装置的
系统过度的负担。
[0213]
另外,在实施由特性线q3表示的控制的情况下,车速在接近第一速度 值u1的范围内,实施使无效化期间减少时的减少程度缓慢的控制,并且随 着车速远离第一速度值u1而减小程度加剧的控制。
[0214]
换而言之,当处于驾驶者容易感觉到图像(虚像)的视觉变化的低速状 态(换而言之,车速处于接近第一速度值u1的范围内)的情况下,以抑制 变形参数的急速更新的方式,实施使无效化期间减小的程度变缓的控制(此 为第二控制)。在这种情况下,实现了更高精度的控制。
[0215]
另外,在实施由特性线q4表示的控制的情况下,车速在接近第一速度 值u1的范围内,实施使无效化期间减少时的减少程度变缓的控制,并且随 着车速远离第一速度值u1而减小程度加剧的控制,并且随着车速接近第二 速度值u2而减小程度变缓的控制(逆s形特性的控制,将其作为第三控制)。 在该第三控制中,除了上述第二控制之外,还实施随着接近第二速度值u2 而使无效化期间减少的程度变缓的控制,通过在达到第二速度值u2时停止 减少并使其成为一定,从而抑制变化急速(突然)到顶而产生不协调感。因 此,能够进一步改善虚像的视觉辨认性。
[0216]
接着,参照图11,。图11示出了与视点丢失相对应的变形图像校正控制 的过程例(第一控制例:对应于图6、图7)的流程图。监视视点位置(步骤 s1),判断有无视点丧失(视点丢失)(步骤s2)。
[0217]
在步骤s2中为“否”时,返回步骤s1。在为”是”时,维持视点丧失 之前的变形参数(步骤s3)。接着,判定在视点丧失后是否再次检测视点位 置(步骤s4)。在为“否”时,返回步骤s3,在为“是”时跳转至步骤s5。
[0218]
在步骤s5中,实施向与再次检测后的视点位置对应的变形参数的更新 (切换)的延迟处理(无效化处理),由此,使使用了与再次检测后的视点 位置对应的参数的至少一次变形处理无效化。此时,也可以并用延长参数更 新周期的参数更新周期变更处理(图7(d)的处理)。
[0219]
在步骤s6中,判定是否经过了规定时间(无效化期间)ta。在为“否
”ꢀ
时,返回步骤s5,在为“是”时跳转至步骤s7。
[0220]
在步骤s7中,实施向与再次检测后的视点位置对应的变形参数的更新 (切换)。无效化期间原则上在此时结束(但是,在实施图7中的(b)的 特性线tk1、tk2的控制时,也能够设计控制部,将实质的无效化期间延长 到参数完全切换的时刻)。在此,在步骤s5中没有变更参数更新周期时, 步骤s7中的处理结束,跳转到步骤s8。
[0221]
另外,在步骤s5中变更了参数更新周期时,在步骤s7中,也并行将参 数更新周期恢复到原来的处理。作为返回的方法,考虑图7中的(b)所示 的三种方法(以下的(1)~(3)中的任一种)。
[0222]
(1)在参数的切换的时刻(换而言之,与参数的切换同步地)将参数更 新周期恢复到原来(图7中的(b)的实线所示的处理)。
[0223]
(2)在参数的切换后也暂时维持参数更新周期,然后恢复到原来(根据 图7中的(b)的特性线tk1的处理)。
[0224]
(3)使参数更新周期的值一边随着时间经过而变化一边恢复到原来(图 7中的(b)
的特性线tk2的处理)。
[0225]
接着,在步骤s8中,判定图像校正是否结束。在为“是”时结束,在 为“否”时返回步骤s1。
[0226]
接着,参照图12。图12是表示与视点丢失对应的变形图像校正控制的 过程例(第三控制例:与图8、图9对应)的流程图。在图12中,除了图11 的步骤以外,还追加了图中粗线所示的步骤s4-1、s4-2。其他与图11相同, 因此省略对共同的处理的说明。
[0227]
在步骤s4-1中,判定视点丢失期间(视点丢失期间)是否短于阈值。在 为“否”时,跳转至步骤s5。
[0228]
当为“是”时,在步骤s4-2中,作为无效化期间(参数的切换的延迟时 间),采用te(ta)(图8的情况),或者采用tf(《ta)(图9的情况)。 此外,在步骤s6中,判定是否经过了相当于te、tf中的任一个的时间。
[0229]
接着,参照图13。图13示出了与视点丢失对应的变形图像校正控制的 过程例(第三控制例:与图10对应)流程图。
[0230]
在步骤s10中,检测车速。在步骤s12中,判定车辆的行驶状态(包含 停止)。例如,实施低速、中速、高速的各状态的判别。
[0231]
在步骤s12中监视视点,在步骤s13中判定有无视点丧失(视点丢失)。 若为“否”的情况,返回步骤s12,“是”的情况则跳转至步骤s14。
[0232]
在步骤s14中,实施如先前说明的图11的控制例1,或图12的控制例 2那样的变形处理。接着,在步骤s15中,判定图像校正是否结束。在为“是
”ꢀ
时结束,在为“否”时返回步骤s10。
[0233]
接着,参照图14。图14中的(a)是表示根据路面重叠hud的显示例 的图,图14中的(b)是表示根据倾斜面hud的显示例的图,图14中的(c) 是表示hud装置的主要部分的结构例的图。
[0234]
图14中的(a)表示根据与显示部(图5的符号116或图14中的(c) 的符号161)的图像显示面(图5的符号117或图14中的(c)的符号163) 对应的虚拟的虚像显示面ps以与车辆1的前方的路面41重叠的方式配置的、 路面重叠hud的虚像显示例。
[0235]
图14中的(b)表示根据以虚像显示面ps的靠近车辆1侧的端部即近 端部与路面41的距离小,远离车辆1侧的端部即远端部与路面41的距离变 大的方式,虚像显示面ps相对于路面41倾斜地配置的、倾斜面hud的虚 像显示例。
[0236]
它们使用与路面41重叠的较宽的虚像显示面ps或相对于路面41倾斜 设置的较宽的虚像显示面ps,例如在车辆1的前方5m~100m的范围内能够 进行各种显示,hud装置大型化从而视点区eb也大型化,优选在比以往更 宽的范围内高精度地检测视点位置,进行使用了适当的变形参数的图像校正。 但是,如果发生视点丢失,则该高精度的变形参数的切换控制反而会使视点 的再次检测后的图像(虚像)的视觉辨认性降低。因此,本发明的控制方式 的应用是有效的。
[0237]
接着,参照图14中的(c)。图14中的(c)的hud装置107具有: 控制部171、投光部151、作为具有图像显示面163的显示部的屏幕161、反 射镜133、将反射面设计为自由曲面的曲面镜(凹面镜等)131、和驱动显示 部161的致动器173。
[0238]
在图14中的(c)的例子中,hud装置107在对应驾驶者的视点a的 高度位置调整视
点区eb的位置时,不移动作为将显示光投影到挡风玻璃2 上的光学部件的曲面镜131(不设置曲面镜131用的致动器),而是通过变 更图像的显示光51在光学部件131上的反射位置来应对。
[0239]
换而言之,在对应驾驶者的眼睛(视点)的高度位置来调整视点区eb 的高度位置的情况下,不使用例如致动器来使将光投影到被投影部件2上的 光学部件131转动,而是通过变更该光学部件131中的光的反射位置来应对。 此外,高度方向是指图中的y方向(是沿着路面41的垂线的方向,从路面 41离开的方向为正的方向)。此外,x方向是车辆1的左右方向,z方向是 车辆1的前后方向(或前方方向)。
[0240]
近年来的hud装置,有以例如在车辆前方相当大的范围内显示虚像为 前提而开发的倾向,这种情况下,装置必然会变得大型化。当然,光学部件 131也变得大型化。当使用致动器等转动该光学部件131时,由于误差,反 而可能导致视点区eb的高度位置的控制精度降低,为了防止这种情况,通 过变更光线在光学部件131的反射面反射的位置来应对。
[0241]
在这样的大型光学部件131中,通过将其反射面作为自由曲面进行最佳 设计等,尽量使虚像的失真不明显化,但是,如上所述,例如在驾驶者的视 点a位于视点区eb的周边的情况等下,有时有无论如何失真都明显化的情 况。
[0242]
因此,在这种情况下,通过实施控制以在规定范围内暂时无效化与再次 检测之后的视点位置对应的参数的应用(延迟),能够防止由于虚像的失真 引起的外观的改变而导致的不协调的感觉,并且能够有效地利用上述控制以 提高视觉辨认性。
[0243]
如上所述,根据本发明,当实施根据驾驶者的视点位置更新变形参数的 视点位置追随变形控制时,能够有效地抑制由于在视点丧失(视点丢失)发 生之后伴随变形参数的更新而导致的图像的外观的瞬时改变对驾驶者造成的 不协调感。
[0244]
本发明可用于单目型hud装置和视差型hud装置中的任一种,在单目 型hud装置中,相同图像的显示光入射到左眼和右眼,在视差型hud装置 中,具有视差的图像入射到左眼和右眼。
[0245]
在本说明书中,车辆这一术语在广义上也可以解释为交通工具。此外, 关于导航的术语(例如标志等)也应被广义地解释,例如,考虑到有助于车 辆运行的广义导航信息的观点等。另外,hud装置也包括作为模拟器(例如 航空器的模拟器)使用的装置。
[0246]
本发明并不限定于上述例示的实施方式,另外,本领域技术人员能够容 易地将上述例示的实施方式变更至权利要求书所包含的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1