人体胸腔心肺复苏模拟方法与流程
1.本发明涉及诸如心肺复苏按压效果的模拟、测试。具体地,本发明涉及人体胸腔心肺复苏模拟方法。
背景技术:
2.心脏骤停,是指心脏射血功能突然停止,造成全身血液循环中断、呼吸停止和意识丧失。据相关统计数据显示,在我国每年约有180万人死于猝死,其中院外猝死达72%-80%,因此及时有效的心肺复苏是心脏病突发患者得以生存的第一个环节。心脏骤停在4分钟内进行抢救为最佳时机,在院外如果等待医生或救援人员赶来,往往为时已晚。传统的心肺复苏主要是采用胸外人工用手按压的方式(罕见开胸手术时直接心脏按压),但是该方法易造成按压疲劳、按压力度不恒定,按压节律不规整等特点,特别是需要长时间按压时,易造成病人抢救成功率的下降,同时操作手法不正确易造成病人胸骨损伤。在公共场合、人流量较大的地方以及医院等要求具备急救手段的场所配备电动心肺复苏设备显得较为急迫。
3.目前市场上所广泛使用的心肺复苏机产品大致分为三类,第一类产品是基于心泵理论机制的直接在心脏外部的胸骨上进行按压,以实现在单个点上按压心脏的效果,使心脏产生泵血,第一类产品的应用可参考专利申请文献us20120238922a1公开的一种用于病人复苏的设备,采用单点按压的柱塞驱动装置对人体胸腔进行按压,基于按压效果的要求,其按压深度必须达到50mm,很容易将人体胸腔内的胸部肋骨压断;第二类产品是基于胸泵理论机制的对患者整个胸廓进行挤压,实现通过胸廓的内部挤压产生心脏泵血,第二类产品的应用可参考专利申请文献cn108430427a公开的自动化胸部按压装置,其特点是通过绷带收缩挤压胸腔以达到较好进行心肺复苏的目的,在实际应用中,发现第二类产品使用时存在容易将胸腔两侧的肋骨压断的风险。第三类产品则是结合了心泵理论机制和胸泵理论机制,既包含了单点进行的按压同时也包含了对胸廓的挤压,第二类产品的应用可参考专利申请文献us7060041b1开的胸腔按压装置,该装置的技术特点是,既有按压,同时按压的时候绷带还会对胸腔产生挤压,在胸腔整体下压的同时也让胸腔进行整体的收缩,胸腔收缩的效果好一点(血流灌注效果好,冠状动脉灌注压指标),对人体损伤小(相当于将人体包裹起来,从单点按压到多点包裹施压)。
4.在心肺复苏领域内,检测心肺复苏效果好坏的有三大指标,分别为冠状动脉灌注压(cpp)、动脉舒张压、呼气末二氧化碳浓度(etco2),对于达到这些指标的实现需要在胸外按压的过程中,由心肺复苏机进行高质量的心肺复苏作业,以提高患者存活的机会。因此,如何对心肺复苏机产品进行性能测试及性能研究都显得非常重要;随着科学技术的发展及在心肺复苏领域的不断研究,心肺复苏机产品不断迭代更新,对心肺复苏机产品进行测试、研究的测试设备、测试方法也在不断更新中,目前的心肺复苏机产品种类繁多、心肺复苏效果参差不齐,需要采用较为可靠的方式来对心肺复苏机产品进行性能测试及性能研究。现在心肺复苏机产品的测试方法大多只针对单点按压参数进行测试,满足不了多样化的心肺复苏机产品测试;特别是上述第三类产品的研究测试,现有技术手段难以比较直观、有效地
获取此类产品的心肺复苏效果。
5.有鉴于此,需要重新设计、研究出一种能够用来模拟人体胸腔实际情况的能适用于各种心肺复苏场合、各种心肺复苏产品的方法,以配合用来直观、有效地获取此心肺复苏效果的测试数据。
技术实现要素:
6.为达到上述目的,本发明提供了人体胸腔心肺复苏模拟方法。
7.本发明提出的人体胸腔心肺复苏模拟方法,包含:锚定一个区域作为心肺复苏模拟的中心区域;将能够用来承受外部按压力和/或挤压力后沿预定的移动路径移动的移动部围绕该中心区域布置,预定的移动路径经由弹性作用和导向支撑来实现人体胸腔的变化模拟;在初始状态下,使所有的所述移动部环绕分布于环形曲面或者环形轮廓之位置上,且使各所述移动部在其移动路径远离中心区域的一端具有用于限制该移动部移动范围的截止端点;使用提供所述弹性作用的弹性部给移动部提供一个指向远离中心区域的弹力作用,在初始状态下,使移动部在弹性部的弹力作用下抵靠于所述截止端点处;向移动部施加外部按压力和/或挤压力,使移动部在承受外部按压力和/或挤压力时均能沿着各自的移动路径靠近或者远离所述中心区域,并使所有所述移动部的移动路径呈放射状围绕在所述中心区域;在外部按压力和/或挤压力的释放过程中,通过弹性部迫使所述移动部在其移动路径靠近中心区域的一端朝向截止端点处位移,直至移动部达到该截止端点处;在使用状态下,针对各个所述移动部,重复施加和释放外部按压力和/或挤压力,以此实现人体胸腔心肺复苏模拟。
8.本发明的有关内容的进一步说明如下:1.通过本发明的上述技术方案的实施,针对人体胸腔心肺复苏的真实场景,设计、研究了一种人体胸腔心肺复苏模拟方法,通过移动部的布置,来为模拟方法提供能够完美模拟人体胸腔的轮廓,其移动路径的设置、移动范围限制的设置,均能准确、直观得模拟人体胸腔在受到按压、挤压时的变化情况,通过弹性部为用来给移动部提供一个指向远离中心区域的弹力作用,同样也是用来模拟人体胸腔在被按压、挤压时向下、向内收缩时的人体组织弹性,以及在按压、挤压释放时人体胸腔扩张的作用力和具有扩展范围的模拟;本发明的这种模拟方法,能够直观、可靠、有效得展示、模拟人体胸腔的多方向心肺复苏按压的过程,可以通过对移动部的直接观察,能够直观地反映出人体胸腔的收缩情况,比如胸腔总体收缩幅度和胸腔不同位置的收缩幅度,也可以通过测试手段来获得几个结构的位移、加速度、受力等信息,以形成更加有效、可靠的试验参数。
9.2.在上述的技术方案中,定义人体仰卧时胸腔轮廓的竖直方向为上、下方向,定义人体仰卧时从头到脚的方向为前、后方向,该模拟方法中用于模拟人体胸腔轮廓或用来呈现环形形状(圆形、椭圆形等),至少包括一块位于顶部上方的移动部、至少两块分别位于顶部下方两侧的移动部,在其中一种情况下,位于顶部的移动部用来承受按压机的按压力,位于两侧的移动部用来承受联动绷带的挤压力,这种设置可组成为较为简单的人体胸腔轮
廓。
10.3.在上述的技术方案中,在初始状态下,使所有的所述移动部环绕分布于环形曲面或者环形轮廓之上,其中:当所述移动部环绕分布于环形曲面时,所示环形曲面为椭圆柱状、圆柱状或者模拟人体胸腔的轮廓形状;当所述移动部环绕分布于环形轮廓时,所示环形轮廓为椭圆、圆形、或者模拟人体胸腔截面的轮廓形状;该模拟方法中的移动部布置方式,使模拟过程中的模型应用更贴合人体结构的外形模拟及弹性模拟。
11.4.在上述的技术方案中,在重复施加和释放外部按压力和/或挤压力的过程中,采集、观察移动部和/或弹性部的数据变化信息;所述数据变化信息至少包含以下数据中的一种或多种:所述移动部的位移数据、所述移动部的受力数据、所述移动部与所述导向支撑部之间的相对位移数据、所述弹性部的受力数据、所述移动部的连续/间隔图像信息;可以采用测距传感器、运动传感器、力传感器或视觉采集机构来获取所述数据变化信息,视觉采集机构可以是工业相机、摄像头等。
12.5.在上述的技术方案中,各所述移动部在承受外部按压力或挤压力沿着各自的移动路径靠近或者远离所述中心区域时,根据所承受外部按压力或挤压力的不同、或者弹性部的弹性作用力的不同,各所述移动部具有不同的移动距离。
13.6.在上述的技术方案中,所述移动路径为从中心区域朝向截止端点发散的路径,该路径的形状为以下的至少一种或至少两者的组合:直线、曲线、折线,该移动路径可由导向支撑部的构造来确定,使用提供所述导向支撑的导向支撑部来为移动部做沿移动路径上的导向和支撑,该导向支撑部为能够使所述移动部滑动耦合于一与移动路径形状一致的刚性件,使该导向支撑部位于中心区域的内侧或外侧。
14.7.在上述的技术方案中,使至少一处相邻的两个所述移动部之间通过轴铰接,通过轴铰接的所述移动部之间滑动连接,以使其中轴铰接的其中至少一个移动部沿移动块靠近或远离中心区域的移动路径的垂直方向具有移动的自由度;在另外一种方式中,使至少一处相邻的两个所述移动部之间通过软性材料柔性连接;以此来更加真实得模拟人体胸腔侧边的情况。
15.8.在上述的技术方案中,在使用弹性部的过程中,可以使所有弹性部的弹性系数相一致,能够推测到按压机作用于人体的时候,什么位置受到的按压力大;也可以将各弹性部的弹性系数设置的不同,可使得每个弹性部的弹性系数对应于不同部位的人体;还可以将位于前方的弹性部的弹性系数大于位于后方的弹性件的弹性系数,来模拟人体仰卧时位于前方的肋骨低于位于后方的肋骨的这一实际情况。
16.本发明提供了优于现有技术的若干优点,所述若干优点包括:1、在一些实施方式中,针对人体胸腔心肺复苏的真实场景,设计、研究了一种人体胸腔心肺复苏模拟方法,通过移动部的布置,来为模拟过程提供能够完美模拟人体胸腔的轮廓,其移动路径的设置、移动范围限制的设置,均能准确、直观得模拟人体胸腔在受到按压、挤压时的变化情况,通过弹性部为用来给移动部提供一个指向远离中心区域的弹力作用,同样也是用来模拟人体胸腔在被按压、挤压时向下、向内收缩时的人体组织弹性,以及
在按压、挤压释放时人体胸腔扩张的作用力和具有扩展范围的模拟;本发明的这种模拟方法,能够直观、可靠、有效得展示、模拟人体胸腔的多方向心肺复苏按压的过程。
17.2、在一些实施方式中,本发明技术方案中的通过该模拟方法的实施,可以通过对移动部的直接观察,能够直观地反映出人体胸腔的收缩情况,比如胸腔总体收缩幅度和胸腔不同位置的收缩幅度,以此来直观、可靠得展现模拟人体胸腔在受到按压力或挤压力时的最直观的收缩情况。
18.3、现有技术的测试方法是用基于单点按压的测试的,而本发明的上述技术方案则是考虑到若是采用按压机加上绷带的方式则会对人体胸腔产生多向按压的情况,最大化模拟了人体胸腔在受到多点按压/挤压时的模拟效果,稳定、可靠,可适用于各种人体胸腔心肺复苏场景。
附图说明
19.图1a至图1c是根据本发明的第一实施方式的各个视图;图2a至图2c是根据本发明的第二实施方式的各个视图;图3a至图3d是根据本发明的第三实施方式的各个视图;图4a至图4c是根据本发明的第四实施方式的各个视图;图5a是根据本发明的第五实施方式的视图;图6a是根据本发明的第六实施方式的视图;图7a是根据本发明的第七实施方式的视图;图8a是根据本发明的第八实施方式的视图;图9a是根据本发明的第九实施方式的视图;图10a是根据本发明的第十实施方式的视图;图11a是根据本发明的第十一实施方式的视图;图12a是根据本发明的第十二实施方式的视图。
20.图中各部件如下:101 中心区域1 移动部11 金属片12 接触表面13 被观察面11 连接体12 自适应体13 伸出块14 轴铰接15 柔性连接2 弹性部3 导向支撑部31 中心块312 安装孔
3122 活动空间3123 连接转轴32 导向柱33 内框架34 外框架35 连接块36 滑道块361 滑道362 复位弹簧37 转动块4 数据采集部5 限位结构51 直线轴承52 固定螺母6 心肺复苏机61 按压机头62 绷带。
具体实施方式
21.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图对本技术的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本技术。但是本技术能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本技术内涵的情况下做类似改进,因此本技术不受下面公开的具体实施方式的限制。
22.本发明旨在针对人体胸腔心肺复苏的真实场景,设计、研究了一种人体胸腔心肺复苏模拟方法,在该模拟方法中,可通过观察、检测模拟器中作用部件的位移等参数变化,能够直观的反映出人体胸腔的收缩情况,包括胸腔总体收缩幅度和胸腔不同位置的收缩幅度,以及人体心肺复苏过程中的其他参数,由此,可以测试市面上多种带绷带的按压机的收缩情况。
23.本发明的重要特征是其提供模拟人体胸腔不同位置收缩幅度等参数的能力。本质上是,所提及的方法中可由绷带及按压头对移动部提供有效压力,从而获得更好的、更接近实际情况的收缩情况,同时对于该方法的应用能够找到以实现更好的接触的平衡位置。这在考虑到人体胸腔组织的形状的可变性以及对更好地接合以进行更有效、精确的测试的需要时是特别有利的。同时定义人体仰卧时胸腔轮廓的竖直方向为上、下方向,定义人体仰卧时从头到脚的方向为前、后方向。
24.本发明的一种人体胸腔心肺复苏模拟方法,用于心肺复苏机或模拟人在施加外部按压力、挤压力时的模拟、测试,特别是能用于心肺复苏机使用效果的观察、检测,该方法包括:锚定一个区域作为心肺复苏模拟的中心区域;将能够用来承受外部按压力和/或挤压力后沿预定的移动路径移动的移动部围绕
该中心区域布置,预定的移动路径经由弹性作用和导向支撑来实现人体胸腔的变化模拟;在初始状态下,使所有的所述移动部环绕分布于环形曲面或者环形轮廓之位置上,且使各所述移动部在其移动路径远离中心区域的一端具有用于限制该移动部移动范围的截止端点;使用提供所述弹性作用的弹性部给移动部提供一个指向远离中心区域的弹力作用,在初始状态下,使移动部在弹性部的弹力作用下抵靠于所述截止端点处;向移动部施加外部按压力和/或挤压力,使移动部在承受外部按压力和/或挤压力时均能沿着各自的移动路径靠近或者远离所述中心区域,并使所有所述移动部的移动路径呈放射状围绕在所述中心区域;在外部按压力和/或挤压力的释放过程中,通过弹性部迫使所述移动部在其移动路径靠近中心区域的一端朝向截止端点处位移,直至移动部达到该截止端点处;在使用状态下,针对各个所述移动部,重复施加和释放外部按压力和/或挤压力,以此实现人体胸腔心肺复苏模拟。
25.在本发明的上述方法中,外部的按压力或挤压力可由心肺复苏机6中的按压机头61加绷带62的方式所产生,以布置至少包括一块位于顶部的移动部1、至少两块位于顶部下方两侧的移动部1为例,心肺复苏机6中的按压机头61安装于位于顶部的移动部处,绷带62裹覆于位于两侧或其余部位的移动部,在按压机头61施加按压力时,按压机头61带动绷带62对移动部施加一定的按压力和挤压力,也可以由模拟人在收到心肺复苏作业时受到的按压力或挤压力产生,中心区域101可视为用来模拟人体胸腔中承受实际挤压作用的主要部位或模拟人体胸腔中心部位的区域,该中心区域101大致位于该移动部的内部中心处;截止端点则是用来限制移动部1移动范围的限位点,该截止端点可视为人体组织在未进行心肺复苏的按压作业时的自然放松状态,人体胸腔自然支撑、展开,该截止端点可由限位结构5实现限位。
26.在本发明的各实施方式中,对于该方法的应用,具有初始状态和使用状态,下面结合该方法实际应用的两种状态对进行描述:初始状态在初始状态下,不向移动部1施加外部的按压力和/或挤压力,移动部1在弹性部2的作用下,被弹性部2被抵顶于或者被拉到这个截止端点处,移动部1受弹性部2的约束和截止端点的约束,呈现位于远离中心区域101且处于最远点的位置。
27.使用状态在使用状态下,针对各个所述移动部,重复施加和释放外部按压力和/或挤压力,以此实现人体胸腔心肺复苏模拟;举例来说,模拟器可套设在心肺复苏机或模拟人上,当外部给模拟器施加外部的按压力和/或挤压力时,各移动部1在按压力和/或挤压力以及弹性部2的弹性力的共同作用下,沿着移动路径靠近所述中心区域101,此时移动部1处于收缩的状态,呈现位于靠近中心区域101近端的位置;在按压力和/或挤压力的施加、释放过程中,模拟器会有个从收缩状态过渡到初始状态的过程,此时移动部1则呈位于截止端点和以靠近或远离中心区域101趋势的中间位置。
28.在模拟器呈现初始状态时,所有的所述移动部1环绕分布于环形曲面或者环形轮廓之上。当所述移动部1环绕分布于环形曲面时,所示环形曲面为椭圆柱状、圆柱状或者模
拟人体胸腔的轮廓形状,环形曲面为椭圆柱状时,椭圆柱状环形曲面是指沿一个轴向方向上分成无穷个椭圆截面,无穷个椭圆沿该轴向形成连续的、光滑的环形曲面;圆柱状环形曲面是指沿一个轴向方向上分成无穷个圆形截面,无穷个圆形沿该轴向形成连续的、光滑的环形曲面;模拟人体胸腔的轮廓形状则是指,该移动部1按照人体胸腔的形状,排布成类似于人体胸腔轮廓结构的曲面形状;当所述移动部1环绕分布于环形轮廓时,所示环形轮廓为椭圆、圆形、或者模拟人体胸腔截面的轮廓形状。
29.在本发明的上述方法中,所述移动部1为用来承受外部按压力或挤压力后产生移动的结构,多个移动部1围绕中心区域101布置;各移动部1在承受外部按压力或挤压力时均能沿着各自的移动路径靠近或者远离所述中心区域101,所有所述移动部1的移动路径呈放射状围绕在所述中心区域101;且各所述移动部1在其移动路径远离中心区域101的一端具有用于限制该移动部1移动范围的截止端点;所述弹性部2为用来给移动部1提供一个指向远离中心区域101的弹力作用的结构;所述弹性部2弹性作用于移动部1,在初始状态下,移动部1在弹性部2的弹力作用下抵靠于截止端点处。
30.以该模拟方法中应用到移动部1、弹性部2、导向支撑部3及一套数据采集部4为例,参考以下实施方式所述,为了将移动部1、弹性部2应用至该人体胸腔心肺复苏模拟方法,本发明的各种实施方式包括:1、应用有多个移动部1、弹性部2、导向支撑部3及一套数据采集部4(不包含力传感器)的心肺复苏模拟方法;2、应用有多个移动部1、弹性部2、导向支撑部3及一套数据采集部4加上能自适应变化特征的的心肺复苏模拟方法;3、应用有多个移动部1、弹性部2、导向支撑部3及一套数据采集部4加上能自适应变化的特征,再加上有助于更好得模拟人体胸腔组织的心肺复苏模拟方法;4、应用有多个移动部1、弹性部2、导向支撑部3及一套数据采集部4且导向支撑位于中心,加上能自适应变化的特征,再加上有助于更好得模拟人体胸腔组织的特征,以及加上能避免移动部1收缩的时候互相干涉的特征的心肺复苏模拟方法;5、应用有多个移动部1、弹性部2、导向支撑部3及一套数据采集部4且导向支撑位于中心,且其中的部分导向、移动部1具有与导向的垂直方向转动自由度特征的心肺复苏模拟方法;6、应用有多个移动部1、弹性部2、导向支撑部3及一套数据采集部4且导向支撑位于外框架34的的心肺复苏模拟方法;7、以及其他可能存在的各种实施方式。
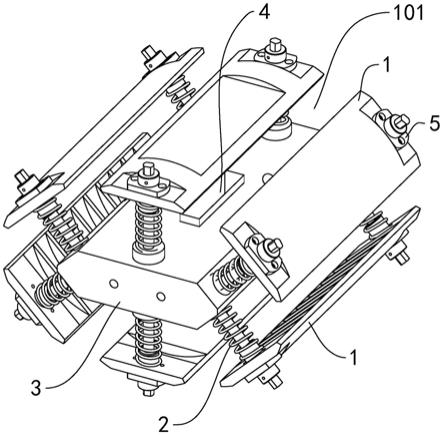
31.第一实施方式考虑到本发明的特定实施方式,并且第一实施方式在图1a至图1c中示出。
32.在此,如图1a至图1c所示,提供了第一实施方式,第一实施方式中的该人体胸腔心肺复苏模拟方法中应用到了按照人体胸腔轮廓围绕的移动部1、弹性部2、导向支撑部3。导向支撑部3包括位于中心区域101的中心块31以及定位安装在中心块31上并且朝向移动部1方向延伸的导向柱32;移动部1用于与心肺复苏机的绷带或按压头紧贴,用于模拟人体胸腔,该人体胸腔心肺复苏模拟方法中至少应用到一块位于顶部的移动部1、至少两块位于顶部下方两侧的
移动部1。移动部1按照人体胸腔轮廓或中心区域101围绕布置,将该轮廓的内部位置定义为中心区域101,移动部1朝向中心区域101内收缩。各所述移动部1在其移动路径远离中心区域101的一端具有用于限制该移动部1移动范围的截止端点,该截止端点为设置在导向柱32顶部的限位机构,该限位机构限制了移动部1向外侧移动的范围。限位机构应用到套设在导向柱32上可沿导向柱32滑动的直线轴承51和套设固定在导向柱32顶部的固定螺母52,移动部1装配到直线轴承51上,直线轴承51具有用于对移动部1远离中心区域101的限位部,固定螺母52具有与该限位部进行限位配合的限位面,但是本发明不限于此,所述限位方向可以是以所述导向柱32的轴向为导向,同时应知晓的是其他能够实现为移动部1移动限位的结构也都是限位结构5的等同替换。
33.本模拟方法中应用到的弹性部2配置为至少为移动部1在收缩状态和初始状态之间变化时提供弹性位移,在其中一种情况下,弹性部2还能用于测算受力情况。
34.本模拟方法中应用到的导向支撑部3用于为移动部1在收缩及展开时提供导向和支撑作用,收缩时朝向中心区域101内导向,展开时朝向中心区域101外侧导向。
35.本模拟方法中应用到的数据采集部4设置在所述移动部1、弹性部2、导向支撑部3中的其中至少一个对应位置上,所述数据采集部4被配置成用于获取移动部1在沿移动路径移动时的数据信息。所述数据采集部4包含测距传感器、运动传感器、力传感器中的一种或多种;所述数据采集部4获取的数据信息至少包含以下数据中的一种或多种:所述移动部1的位移数据、所述移动部1的受力数据、所述移动部1与所述导向支撑部3之间的相对位移数据、所述弹性部2的受力数据。数据采集部4可安装在移动部1上,也可安装在弹性部2或导向支撑部3上。在本模拟方法的应用中,可以通过对移动部的直接观察,能够直观地反映出人体胸腔的收缩情况,比如胸腔总体收缩幅度和胸腔不同位置的收缩幅度,以此来直观、可靠得展现模拟人体胸腔在受到按压力或挤压力时的最直观的收缩情况,采集以上各种数据可以量化该模拟器在模拟人体胸腔心肺复苏时的收缩情况,并且有利于数据处理做进一步研究。
36.应该注意的时,该模拟方法中的移动部1为多个,在第一实施方式中,移动部1围绕按照人体胸腔的轮廓对称分布(或呈椭圆柱状),移动部1的数量为6个,分别位于上、下、左上、左下、右上、右下位置,6个移动部1围绕中心区域101形成的人体胸腔轮廓外周进行定位,移动部1具有朝向中心区域101外侧的接触表面12,该接触表面12用于与心肺复苏机的按压作用部位贴合。具体的,移动部1为一金属片11,金属片11的外侧设置有用于与心肺复苏机贴合接触的接触表面12,位于上、下位置的金属片11的接触表面12为平整面,位于左上、左下、右上、右下位置的金属片11的接触表面12为弧形面。移动部1作为模拟人体轮廓的部件,也还可以是金属、塑料、高分子材料等各种材料制得。
37.本模拟方法中对于弹性部2和导向支撑部3的布置,弹性部2被布置成单独作用于各移动部1,也可由多个弹性部2作用于一个移动部1,导向支撑部3被布置成单独作用于移动部1的导向并且被布置成对所有的弹性部2进行支撑。弹簧上位为弹性部2,弹性部2除弹簧外还有其他弹性部2件的大致应用,可以是弹性片、气囊弹簧、板簧、拉簧等,所采用的弹簧可以是圆柱螺旋弹簧、圆锥螺旋弹簧或波形弹簧等。
38.本模拟方法中,移动部1在弹性部2的作用下,在外部心肺复苏机未工作的状态下,移动部1受弹性部2影响,多个移动部1相互展开呈初始状态,并通过移动部1上与绷带的接
触表面12以紧贴的方式来贴合心肺复苏机的安装(其中的一种心肺复苏机中,接触位置应用到心肺复苏机的按压机头以及与该按压机头联动的绷带)。
39.第二实施方式图2a至图2c示出了根据本发明的一个实施方式的另外的人体胸腔心肺复苏模拟方法,为第二实施方式。第二实施方式与第一实施方式的其他应用方式、步骤大致相似,有区别的是,在此第二实施方式中,所述施加外部按压、挤压力的部件与接触表面12以自适应方式来贴合被接触处的各种形状变化,至少一个所述移动部1件能够沿着环形轮廓或者环形曲面的横截面轮廓的切线方向移动,移动部1可以有一个旋转的自由度;位于顶部下方两侧的移动部1在沿导向支撑部3的导向方向位移的同时还具有沿前后轴线转动的自由度。
40.在第二实施方式中,在本模拟方法中配置有六个移动部1的情况下,可以是左上、右上、左下、右下四个移动部1设置旋转自由度。位于顶部下方两侧的移动部1应用到连接体11和自适应体12,所述连接体11与所述导向支撑部3配合连接,所述自适应体12可转动得定位安装在装配体上,所述连接体11和自适应体12具有沿导向支撑部3的导向方向位移的前后方向设置的轴线。这样设置的目的是,为了使得移动部1与绷带自适应,更真实的模拟人体胸腔中在受压时产生的人体组装形变。
41.第三实施方式图3a至图3d示出了根据本发明的一个实施方式的另外的人体胸腔心肺复苏模拟方法,为第三实施方式。第三实施方式与第二实施方式的其他应用方式、步骤大致相似,有区别的是,在此第三实施方式中,至少一个所述移动部1能够沿着一垂直于其移动路径且大致平行于中心区域101的转动轴转动,具体的,其中位于左上和右上的导向杆相对于与中心块31的连接处可转动,所述导向支撑部3应用到位于中心区域101中心的中心块31以及定位安装在中心块31上并且朝向移动部1方向延伸的导向柱32,所述中心块31在朝向各移动部1的方向上各自设置有导向安装面311,在垂直于该导向安装面311的方向上开设有安装孔312,安装孔312用于导向柱32的定位安装,位于左上和右上的安装孔312中具有供导向柱32转动的活动空间3122,在其中位于两侧的导向柱32可转动得与中心块31定位连接(导向柱32伸入安装孔312的部位处设置连接转轴3123),其目的之一也是为了能更好得模拟人体胸腔的真实情况。
42.第四实施方式图4a至图4c示出了根据本发明的一个实施方式的另外的人体胸腔心肺复苏模拟方法,为第四实施方式。第四实施方式与第一实施方式的其他应用方式、步骤大致相似,有区别的是在此第四实施方式中,模拟方法中应用到的至少一处相邻的两个所述移动部1之间通过轴铰接14,如附图4a所示,其中位于右上、右下的两个移动部1之间以及位于左上、左下的两个移动部1之间均通过轴铰接14。
43.为了避免铰接的移动部1收缩的时候互相干涉,影响滑动的顺畅,还应该允许左上、右上的移动部1有一定的避让空间;具体的,位于顶部下方两侧的移动部1的数量分别为两块,在这其中的位于上方的移动部1伸出有伸出块13,此处的导向支撑部3应用到连接块35、滑道块36和导向柱32,连接块35滑动设置于导向柱32,滑道块36与连接块35可转动连接,在滑道块36上设置有滑道,伸出块13滑动设置于滑道块36的滑道上,在滑道中设置有用于复位的复位弹簧362;在这其中的位于下方的移动部1与位于上方的移动部1通过轴铰接
14,此处的导向支撑部3应用到转动块37、导向柱32,位于下方的移动部1与转动块37可转动得连接,转动块37滑动设置于导向柱32上。
44.第五实施方式图5a示出了根据本发明的一个实施方式的另外的人体胸腔心肺复苏模拟方法,为第五实施方式。第五实施方式与第一实施方式的其他应用方式、步骤大致相似,有区别的是在此第五实施方式中,本模拟方法中应用到的至少一处相邻的两个所述移动部1之间通过软性材料柔性连接15, 如附图5a所示,其中位于右上、右下的两个移动部1之间以及位于左上、左下的两个移动部1之间均软性材料柔性连接15,以此来更加真实得去模拟人体胸腔的皮肤组织。
45.第六实施方式图6a示出了根据本发明的一个实施方式的另外的人体胸腔心肺复苏模拟方法,为第六实施方式。第六实施方式与第三实施方式或第一实施方式的其他应用方式、步骤大致相似,有区别的是在此第六实施方式中,本模拟方法中应用到的所有所述移动部1之间均通过软性材料柔性连接15,各移动部1受软性材料作用使得各移动部1之间联动。
46.当第六实施方式采用与第三实施方式大致相似的其他应用方式、步骤时,所述施加外部按压、挤压力的部件与接触表面12以自适应方式来贴合被接触处的各种形状变化,至少一个所述移动部1件能够沿着环形轮廓或者环形曲面的横截面轮廓的切线方向移动,移动部1可以有一个旋转的自由度,且至少一个所述移动部1能够沿着一垂直于其移动路径且大致平行于中心区域101的转动轴转动,具体的,其中位于左上和右上的导向杆相对于与中心块31的连接处可转动,同时所有所述移动部1之间均通过软性材料柔性连接15。
47.在第五实施方式和第六实施方式中,柔性材料可以是皮革,布面,带弹性或者略带弹性均可以,用于模拟人体皮肉组织。或者采用柔性连接15或者铰接,则多个移动部1或者每两个相邻的移动部1之间都是可以连接的,视具体需求而定。以上的几种软性连接、轴铰接方式,以及使移动部具备转动、切线移动的特征,其效果都是为了更真实的模拟人体胸腔的运动,从而进一步提高人体胸腔心肺复苏模拟的可靠性、准确性。
48.第七实施方式图7a示出了根据本发明的一个实施方式的另外的人体胸腔心肺复苏模拟方法,为第七实施方式。
49.在第七实施方式中,该模拟方法应用到移动部1、弹性部2、导向支撑部3,导向支撑部3为用于限制移动部1移动路径的机构,弹性部2的一端作用于移动部1、另一端作用于导向支撑部3,所述导向支撑部3应用到环绕在所述移动部1内侧的内框架33,在内框架33的外围设置导向柱32,所述导向柱32上设置有所述截止端点,所述移动部1设立于所述截止端点(限位机构5)和内框架33之间,所述弹性部2套设于导向柱32且抵顶于所述移动部1和所述内框架33之间,所述弹性部2为压缩弹簧,所述弹性部2为所述移动部1施加的弹性作用方向为导向柱32轴向朝外的方向,即背离中心区域的方向。
50.第八实施方式图8a示出了根据本发明的一个实施方式的另外的人体胸腔心肺复苏模拟方法,为第八实施方式。
51.在此第八实施方式中,该模拟方法应用到移动部1、弹性部2、导向支撑部3,所述导
向支撑部3应用到环绕在所述移动部1外侧的外框架34,所述外框架34的内壁设置朝向中心区域101内部的导向柱32,所述导向柱32上设置有所述截止端点,所述截止端点(限位机构5)设立于所述移动部1和外框架34之间,所述弹性部2套设于导向柱32,所述弹性部2为拉簧,所述弹性部2的一端与所述外框架34连接,另一端与所述移动部1连接,所述弹性部2为所述移动部1施加的弹性作用方向为导向柱32轴向朝外的方向,即背离中心区域的方向。
52.第九实施方式图9a示出了根据本发明的一个实施方式的另外的人体胸腔心肺复苏模拟方法,为第九实施方式。
53.第九实施方式与第一实施方式的其他应用方式、步骤大致相似,有区别的是在此第九实施方式中,本模拟方法应用到的所述移动部1具有朝向前方或后方的被观察面13,所述数据采集部4为视觉采集单元,由视觉采集单元采集被观察面13的连续/间隔图像信息,或者直接肉眼观察模拟人体轮廓的变化。
54.第十实施方式图10a示出了根据本发明的一个实施方式的另外的人体胸腔心肺复苏模拟方法,为第十实施方式。
55.第十实施方式与第一实施方式的其他应用方式、步骤大致相似,该模拟方法应用到移动部1、弹性部2、导向支撑部3,有区别的是在此第十实施方式中,从一环形轮廓上看,第一实施方式采用的是一个弹簧,而在第九实施方式中,采用的是两个弹簧对一环形轮廓的移动部1进行弹性作用。
56.第十一实施方式图11a示出了根据本发明的一个实施方式的另外的人体胸腔心肺复苏模拟方法,为第十一实施方式。
57.第十一实施方式与第一实施方式的其他应用方式、步骤大致相似,该模拟方法应用到移动部1、弹性部2、导向支撑部3,有区别的是,从一环形轮廓上看,第一实施方式采用的是一个弹簧,而在第十一实施方式中,采用的是三个弹簧对一环形轮廓的移动部1进行弹性作用。
58.第十二实施方式图12a示出了根据本发明的一个实施方式的另外的人体胸腔心肺复苏模拟方法,为第十二实施方式。
59.第十二实施方式与第一实施方式的其他应用方式、步骤大致相似,该模拟方法应用到移动部1、弹性部2、导向支撑部3,具有,有区别的是,第一实施方式中采用的是弹簧作为弹性部2,而在第十二实施方式中,弹性部2采用的是异型弹片。
60.在上述各实施方式中,所采用的所有弹性部2的弹性系数相一致,能够推测到按压机作用于人体的时候,什么位置受到的按压力大;也可以将各弹性部2的弹性系数设置的不同,可使得每个弹性部2的弹性系数对应于不同部位的人体;还可以将位于前方的弹性部2的弹性系数大于位于后方的弹性件的弹性系数,来模拟人体仰卧时位于前方的肋骨低于位于后方的肋骨的这一实际情况。
61.上述实施方式只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发
明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1