一种吊牌穿绳控制系统的制作方法
1.本发明属于智能制造技术领域,特别涉及一种吊牌穿绳控制系统。
背景技术:
2.吊牌常用于服装等领域,吊牌上的平面设计能够记载广告、成分说明、洗涤指导、条形码、认证标志等内容。如图1-图4所示,吊粒绳2在中部设有吊粒插座2a,吊粒绳2一端的吊粒插头2b穿过多个吊牌并插在吊粒插座2a上。目前,吊牌的穿绳主要是采用人工操作,成本高,而且容易漏掉吊牌。
技术实现要素:
3.本发明实施例之一,一种吊牌穿绳控制系统,该系统包括,
4.吊牌穿绳机构,用于将具有吊粒插座和吊粒的吊粒绳具有吊粒一端穿过吊牌的穿孔,然后将吊粒插入吊粒插座,完成吊牌穿绳工序;
5.吊粒绳输送机构,用于将吊粒绳输送至所述吊牌穿绳机构;
6.吊牌转移机构,用于将待穿绳吊牌输送至所述吊牌穿绳机构;
7.吊牌输入机构,用于将待穿绳吊牌输送至所述吊牌转移机构;
8.吊牌输出机构,用于将已穿绳吊牌输送至下一工序工位,
9.主控制器,连接所述吊牌穿绳机构、吊粒绳输送机构、吊牌转移机构、吊牌输入机构、吊牌输出机构,并输出控制指令,控制所述各机构的执行动作和顺序。
附图说明
10.通过参考附图阅读下文的详细描述,本发明示例性实施方式的上述以及其他目的、特征和优点将变得易于理解。在附图中,以示例性而非限制性的方式示出了本发明的若干实施方式,其中:
11.图1为当前常见的吊粒绳的示意图;
12.图2为吊牌的示意图;
13.图3-a为吊粒插座的截面图;
14.图3-b为吊粒插座及偏心穿过吊粒插座的吊粒绳立体图;
15.图4为吊粒绳穿过吊牌后的立体图;
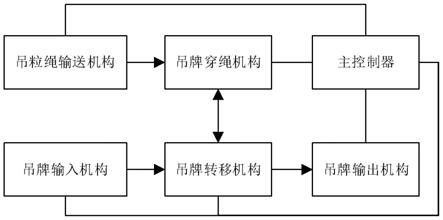
16.图5是根据本发明实施例之一的控制系统组成示意图。
17.其中,100——吊粒绳,101——吊粒插座,1011——插座凹部,1012——插座过绳孔,102——吊粒插头,
18.200——吊牌,201——吊牌穿孔。
具体实施方式
19.本发明的目的是提供一种高效率的吊牌自动穿绳控制系统,以解决现有吊牌只能
依靠人工穿绳的问题,同时,本发明还要解决在自动穿绳过程中,如何准确的将吊粒插头插到吊粒插座中的难题。
20.根据一个或者多个实施例,如图5所示,一种吊牌穿绳控制系统,该系统包括:吊牌穿绳机构、吊粒绳输送机构、吊牌转移机构、吊牌输入机构、吊牌输出机构,以及主控制器。
21.吊牌穿绳机构,用于将具有吊粒插座和吊粒插头的吊粒绳具有吊粒插头一端穿过吊牌的穿孔,然后将吊粒插入吊粒插座,完成吊牌穿绳工序;
22.吊粒绳输送机构,用于将吊粒绳输送至所述吊牌穿绳机构;
23.吊牌转移机构,用于将待穿绳吊牌输送至所述吊牌穿绳机构;
24.吊牌输入机构,用于将待穿绳吊牌输送至所述吊牌转移机构;
25.吊牌输出机构,用于将已穿绳吊牌输送至下一工序工位,
26.主控制器,连接所述吊牌穿绳机构、吊粒绳输送机构、吊牌转移机构、吊牌输入机构、吊牌输出机构,并输出控制指令,控制所述各机构的执行动作和顺序。这里的主控制器,可以采用plc。
27.所述吊牌穿绳机构在穿绳动作中,由位于吊牌穿孔上方的导杆下压穿过所述吊牌穿孔,将被横位于所述吊牌穿孔上方的吊粒绳带着穿过所述吊牌穿孔,同时,
28.位于所述吊牌穿孔下方,依次设有状态受控的第二夹爪、导向夹爪和吸入器,
29.具有负压的吸入器将已经穿过所述吊牌穿孔的吊粒绳吸入吸入器中,这时,由导向夹爪夹住所述吊粒绳的吊粒插头,然后
30.第二夹爪将吊粒绳的一部夹住并牵引,以引正所述吊粒插头和吊粒插座,然后,
31.将所述吊粒插入所述吊粒插座。
32.所述导向夹爪上设有导向槽,该导向槽的一端为楔形部,使得被所述导向夹爪夹住的吊粒插头在牵引下滑入该楔形部中,从而被引正为预设的姿态。
33.所述第二夹爪被设置在一翻转缸上,在完成对所述吊粒插头和吊粒插座的引正后,所述第二夹爪在所述翻转缸的带动下翻转,使得所述吊粒插头对准所述吊粒插座,然后将该吊粒插头插入所述吊粒插座。
34.所述吊粒绳在被所述第二夹爪牵引时,所述吊粒绳上的吊粒插座被置于一个夹持槽内,在牵引力作用下,所述吊粒插座被引正为预设姿态。
35.所述吊粒插座的结构为,吊粒绳从所述吊粒插座一端偏心位置穿过,内空的吊粒插座孔位于所述吊粒插座的另一主半部。
36.其中,穿绳流程中的控制方法包括以下方面:
37.1、为保证被穿对象即吊粒的位置恒定,圆柱形吊粒上的绳子是偏心的,利用了这一结构,让水平x轴伺服在往前牵引至设定位置的时候,配合气缸向下紧贴平台,再加上绳子具备一定的张力的情况下,促使吊粒每次都能停在同一个位置,且每次的姿态保证一致,即被穿物体准确就位。此处需要伺服准确的位置控制。
38.2、吊粒绳的张力控制,采用了直驱电机带减速比,配合光电检测和机械弹簧,用最经济的成本且简单的方法实现了该张力要求,控制过程是这样的,放绳盘的绳子在被牵引的过程中,弹簧被压迫且发生偏移后光电信号被触发,此时直驱电机自动启动,弹簧被释放后光电信号消失,继而自动关闭电机,整个过程自动执行,张力被维持在一定范围之内,完全满足牵引的需求。
39.3、为保证夹子准确夹在柔性绳子端部的硬塑料穿物上(带倒钩,一旦穿进不会滑出)。这里也存在两个问题,一是夹的位置,二是穿物的姿态。所以整个过过程包含了,垂直方向y轴的精确位置运动,配合用于夹绳子的两个不同功能的夹子由气缸控制。首先大夹子夹住绳子,同时y轴下移,穿物在大夹内部被螺旋机械结构在一定压力的情况下自动纠正姿态(注意它不是圆形或正方形截面,而是长方形)。接近目标位置前小夹子辅助轻夹住,y继续下移,位置到后,小夹重夹。该位置设定配合了一定绳子张力和气压压力调节。它最终保证了穿物的姿态。
40.4、被穿物和穿物的姿态位置都保证了之后,穿物在y轴方向准确定位到与被穿物吊粒相同高度即可准确成功穿入。
41.根据一个或者多个实施例,一种吊牌穿绳方法,包括如下步骤:
42.s1、所述吊粒绳输送装置夹持住吊粒绳张紧机构的吊粒绳的一端向前输送后,由所述吊粒插座夹持装置将吊粒绳中部的吊粒插座夹持并固定;
43.s2、导杆向下移动将所述吊粒绳穿过吊牌孔;
44.s3、利用所述定位插接装置引正所述吊粒插座和所述吊粒插头的方向,随后将所述吊粒插头插接在所述吊粒插座上;
45.s4、所述吊粒绳输送装置向后滑动,将完成穿绳的吊粒绳后端切断。
46.步骤s2具体包括:
47.s21、由吸入器将所述吊粒绳吸入并绷直所述吊粒绳;
48.s22、所述吊粒插头导向夹爪将吊粒绳夹在纵向导向槽中,吊粒插头导向夹爪相对于静止的吊粒绳下移直至吊粒插头卡在楔形定位槽中以引正吊粒插头的方向;s23、松开所述吊粒插座夹持装置,第二夹爪夹持住吊粒插头尾部的吊粒绳,定位插接装置整体下移下拉吊粒绳以带动所述吊粒插座在所述吊粒插座夹持装置中向前滑动至靠近所述吊粒插座夹持装置前端开口,以引正所述吊粒插座方向;s24、所述吊粒插座夹持装置向前滑动并将引正后的所述吊粒插座夹持并固定;s25、定位插接装置在两轴轨道上进行两轴滑动并由所述翻转缸带动第二夹爪翻转以将所述吊粒插头插接在所述吊粒插孔内。
49.根据一个或者多个实施例,一种吊牌穿绳控制系统,包括:吊牌穿绳机构、吊粒绳输送机构、吊牌转移机构、吊牌输入机构、吊牌输出机构,以及主控制器。
50.吊粒绳输送机构,包括吊粒绳绳盘,连续串联的吊粒绳被盘在绳盘上。绳盘的盘轴与交流电机701输出转轴连接,绳盘在交流电机701的驱动下转动,放出吊粒绳。该吊粒绳输送机构,还包括一个可以水平移动的电动滑台702。在该电动滑台702上设有由垂直气缸703驱动的操作台。在该操作台上,设有吊粒绳剪刀704,该吊粒绳剪刀704的动作由气缸705控制。在操作台上还设有吊粒绳夹子706,该吊粒绳夹子706的动作由气缸707控制。当吊粒绳夹子706夹住吊粒绳,把吊粒绳夹持到吊牌穿绳机构,用来完成穿绳的工序。而吊粒绳剪刀704则用来将串联的吊粒绳剪断。
51.吊牌输入机构,包括有多个储牌槽,用来放入需要穿绳的吊牌。储牌槽的大小是可以调节的,用来存放尺寸不同的吊牌。储牌槽的设置角度可以是45度倾斜向下的,接近垂直状态,当最底层的吊牌被抽走之后,有利于位于上层的吊牌依靠重力自动向下移动到下层。当然,这个储牌槽也可以用储牌盒来代替的。对应每个储牌槽,都有一个对应的吸盘。吸盘可以进行伸缩,由气缸601负责驱动伸缩动作,当吸盘通过伸缩动作靠贴在储牌槽里最底下
吊牌的牌面,吸盘在气缸602作用下产生吸力,吸住了该吊牌。可见每个吸盘都有自己对应的气缸601和气缸602。同时,每个吸盘都被设计为安装在一个可以转动的横轴上,该横轴在气缸603的驱动下转动,带动其上的吸盘进行翻转动作,吸盘在吸住吊牌后通过翻转动作将吊牌从储牌槽中抽出,放到可以水平移动吊牌的电动滑台605上,该电动滑台605是电缸驱动的,这时候,吸盘的吸力被关闭,吸盘复位。
52.由于吊牌输入机构设有多个储牌槽,当第一张吊牌从第一个储牌槽中被放置到电动滑台605上,被电动滑台605移动到第二个储牌槽的下方,由对应第二个储牌槽的吸盘放到第一张吊牌上。这样第一张吊牌与第二张吊牌就叠加了。两张吊牌的穿孔也是对合的。依此类推,根据需要,可以有多张吊牌被叠合在一起。
53.在电动滑台605上设有定位销,该定位销由气缸604驱动上下伸缩,当定位销伸长时,定位销正好穿过吊牌的穿孔,将吊牌固定在电动滑台601上,保证吊牌不至于偏移位置。
54.吊牌转移机构的组成核心是一个旋转电缸301,这这个旋转电缸301上设有4个夹子,即夹子302、303、304和305,分别由气缸306、307、308和309控制其夹紧和放开的动作。这几个夹子可以对称分布在所述选装电缸301的4个方向上,并且在旋转电缸301的驱动下是同步转动的。当夹子302从吊牌输入机构中电动滑台605上夹取到已经叠加完成的一组吊牌,在旋转电缸301的驱动下,该夹子302转到了吊牌穿绳机构中,准备进行吊牌的穿绳工序。同时,已经在吊牌穿绳机构中完成穿绳的吊牌组,被夹子303夹取转送到吊牌输出机构中。
55.吊牌输出机构,包括一个可垂直移动的滑台401,该滑台401由气缸402驱动上下移动。在该滑台401上设有吊牌输出夹子403,该夹子403的夹放动作由气缸404驱动,该夹子403的伸缩动作由气缸405驱动。当吊牌转移机构中的夹子303将穿绳完成的吊牌送至吊牌输出机构后,由夹子403从夹子303手中接过吊牌,由滑台401送至吊牌输出机构的输送带上,该输送带可以由步进电机406驱动。
56.吊牌穿绳机构,包括一个吊粒插座夹持器504,该夹持器位于夹持器平台501上。夹持器平台501在气缸502和气缸503的作用下在水平上移动,夹持器504对于吊粒插座的夹持动作又气缸505驱动控制。吊牌穿绳机构还包括吸管508和一个垂直运动的导杆506。该导杆506的头部设有一个叉子,该导杆506由气缸507控制驱动。当吊粒绳输送机构中的吊粒绳夹子706夹住吊粒绳,把吊粒绳夹持并且穿过夹持器504后,这时吊粒绳已经位于待穿绳吊牌组的穿孔上方了。接着,导杆506在气缸507驱动下,向下运动,导杆506头部的叉子将吊粒绳穿过吊牌组的穿孔。
57.吸管508位于待穿绳吊牌组穿孔的下方,由气缸509控制启动和关闭。在导杆506将吊粒绳穿过吊牌组穿孔的同时,气缸509启动吸管508吸气,将吊粒绳以及吊粒插头吸过吊牌组的穿孔。
58.吊牌穿绳机构,包括一个垂直牵引电缸510,可以上下移动。在该牵引电缸510上设有小夹子511和大夹子512。小夹子511由气缸513控制夹放。大夹子512由气缸514控制夹放。小夹子511上设有一个导形槽,用来将吊粒插头导入预设的姿态,同时,该小夹子511被设置在一个翻转气缸515上。当吊粒插头被穿过吊牌租的穿孔后,大夹子512夹住吊粒绳和吊粒插头后,在牵引电缸510作用下向下牵拉吊粒绳和吊粒插头。然后,通过小夹子511夹住吊粒插头,上移到夹持器边。这时,吊粒插座在牵引作用下已经调整好姿态并且被夹持器504夹
住,吊粒插头也在小夹子511的导形槽作用下调整好了姿态。小夹子511在翻转气缸515的作用下翻转后,吊粒插头呈现为水平状,这时小夹子511在气缸516作用下前推,将吊粒插头插入吊粒插座中。
59.在本实施例中,吊粒自动穿绳工艺的特点包括,
60.1、放绳盘主动放吊粒绳,要求保持一定的张力和位置。
61.2、逐个取吊牌,要求精确定位,且张数及牌位可自由设定。
62.3、夹子夹住吊粒绳子x水平方向运动,要求多点定位执行相关动作。
63.4、旋转电缸完成精确送吊牌,要求90度定位,且4个夹子在线切换角色。
64.5、通过真空吸管改变绳子为垂直方向。
65.6、夹子夹住绳子y垂直方向运动,要求多点定位执行相关动作。
66.7、收吊牌定位移动,要求吊牌错位叠,可设间隔。
67.吊牌穿绳控制系统开可以实现的功能包括,
68.1、放绳盘具备空盘报警,绳子打结堵转报警。
69.2、缺牌、掉牌报警。
70.3、旋转电缸上有4组夹子,间隔90度,每完成一个产品,转动90度,同时每个夹子顺序切换角色(送料、穿绳、收料、空闲)。
71.4、取吊牌、吊牌穿绳、收吊牌3个流程可独立运行,也可自由组合运行,且互不干扰。
72.5、处于工艺调试状态时,每个流程可单步进行操作。
73.6、处于设备维修状态时,每个设备可单独进行操作。
74.7、人机界面上除了必须的操作功能、工艺参数输入等,还配置了检测元件的输入监控,报警信息自动弹出,同时输出外部三色信号灯。
75.8、产量统计和预设。
76.本发明系统颠覆了传统由人工完成吊牌穿绳的时代。从储牌盒、放绳盘开始,实现了一键启动,完成取牌、送牌、穿绳、收牌,自动循环的整个流程。且在诸多环节都设置了光电、接近、张力传感器等,从而既准确又安全的实现了工艺要求。穿错、穿漏错误率几乎达到0。机器可24小时不间断使用,1个工人可以同时掌管3台,从而既提高了生产效率,也减轻了人力劳动强度,还增加了员工的收入回报。
77.值得说明的是,虽然前述内容已经参考若干具体实施方式描述了本发明创造的精神和原理,但是应该理解,本发明并不限于所公开的具体实施方式,对各方面的划分也不意味着这些方面中的特征不能组合,这种划分仅是为了表述的方便。本发明旨在涵盖所附权利要求的精神和范围内所包括的各种修改和等同布置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1