一种全自动动物舌头仿真运动装置的制作方法
1.本实用新型涉及生物机模型仿真动作领域,尤其涉及一种全自动动物舌头仿真运动装置。
背景技术:
2.近年以来,国内外的文旅行业经历了飞跃式的发展,各种大中型仿生游园机械设备逐渐进入人们的视野,开始大量进入主题乐园,参与到与游客的互动活动中。但由于众多设备生产厂家能力高低不同,其设计生产的设备也良莠不齐,大量造型单一、动作呆板的机械模型充斥市场。
3.通过调研发现,现有的游园机械设备中,很多设备的口部仅有开合动作,而动物灵活的舌头却固定在口腔内,没有参与互动表演,无法给广大游客提供精致的仿真动作表演或具有优良感官的互动体验,导致仿生游园机械设备在实际应用中的表现力大打折扣,难以达到乐园经营方的引进初衷。
技术实现要素:
4.本实用新型的目的在于提供一种全自动动物舌头仿真运动装置,从而解决现有技术中存在的前述问题。
5.为了实现上述目的,本实用新型采用的技术方案如下:
6.一种全自动动物舌头仿真运动装置,包括舌体模型和驱动系统;所述舌体模型包括水平段模型和弯曲段模型,所述水平段模型的前端与所述弯曲段模型的后端相接;所述驱动系统包括水平段驱动单元和弯曲段驱动单元,所述水平段驱动单元与所述水平段模型相连,通过所述水平段驱动单元带动所述舌体模型的前后移动,所述弯曲段驱动单元与所述弯曲段模型相连,通过所述弯曲段驱动单元带动所述弯曲段模型进行弯曲和展平。
7.优选的,所述弯曲段驱动单元包括驱动电机、拉索和弹性钢板,所述弯曲段模型固定安装于所述弹性钢板上方,所述拉索的钢丝绳两端分别连接于所述弯曲段模型的舌尖位置和所述驱动电机,通过所述驱动电机拉紧所述拉索的钢丝绳带动所述弯曲段模型向上翘起,当所述驱动电机处于原始状态时,通过所述弹性钢板带动所述弯曲段模型恢复水平伸直。
8.优选的,所述水平段驱动单元包括减速电机、链轮、链条和牵引座;所述链轮固定安装于固定架上,并与所述链条配合;所述减速电机与所述链轮相接,带动所述链轮转动;所述链条与所述牵引座固定相连,所述水平段模型固定安装于所述牵引座上方,所述弹性钢板的末端与所述牵引座的前端固定相连,通过所述减速电机的转向带动所述舌体模型的前后移动。
9.优选的,所述水平段模型包括单元模型和四连杆曲柄滑块机构,所述单元模型并排安装于收缩状态下的所述四连杆曲柄滑块机构上方;第一节所述四连杆曲柄滑块机构的中间转轴为用于固定支撑所述舌体模型的立轴,最后一节所述单元模型的前端安装于l型
弯板的竖直面,所述l型弯板的水平面上方安装所述弹性钢板。
10.优选的,所述水平段驱动单元包括减速电机、连杆、导轨和导轮;所述导轨安装于固定架上,与所述水平段模型相平行,所述导轮安装于所述l型弯板的水平面下方,与所述导轨相接,沿所述导轨前后移动;所述连杆的关节轴承一端与所述减速电机相连,另一端与所述四连杆曲柄滑块机构的外转轴铰接,通过所述减速电机的转动方向带动所述舌体模型的水平段进行伸缩。
11.优选的,所述水平段模型包括单元模型、伸缩杆和拉簧,所述单元模型的两侧设有伸缩杆安装孔,所述结构单元的中间位置设有拉簧孔;两根所述伸缩杆分别顺序穿过每一个所述单元模型两个的所述伸缩杆安装孔,相邻的两个所述单元模型之间安装所述拉簧。
12.优选的,所述水平段驱动单元包括减速电机、链轮、链条和牵引架;所述链轮固定安装于固定架上,并与所述链条配合;所述减速电机与所述链轮相接,带动所述链轮转动;所述链条与所述牵引架固定相连,所述水平段模型首端的所述结构单元固定安装于固定架,所述舌体模型末端的所述单元模型固定安装于所述牵引架上方;所述弹性钢板的末端与所述牵引架固定相连,通过所述减速电机的转向带动所述牵引架前后移动。
13.优选的,所述舌体模型的弯曲段内部上方设有圆孔,所述拉索的钢丝绳从所述圆孔内部穿过固定于所述舌体模型的舌尖内部。
14.本实用新型的有益效果是:本实用新型公开了一种全自动动物舌头仿真运动装置,通过将舌头模型进行功能划分,可以灵活的模拟舌头的运动动作,解决了目前机械模型中舌头不能配合设备整体动作的问题,解决了机械模型的舌头的动作僵直、呆板的问题;本实用新型在整体设备的嘴部闭合时收回口腔内部,从而增加机械模型整体设备进行表演时的灵活性、观赏性和趣味性。
附图说明
15.图1是固定式舌头仿真运动装置结构图;
16.图2是固定式舌体模型结构图;
17.图3是固定式水平段模型驱动结构图;
18.图4是固定式弯曲段模型驱动结构图;
19.图5是固定式水平段驱动单元连接结构图;
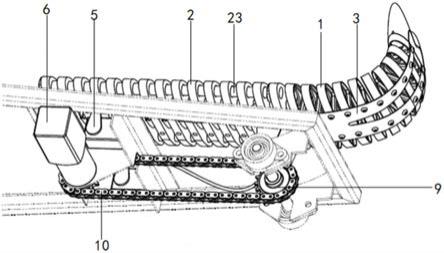
20.图6是连杆传动式舌头仿真运动装置结构图;
21.图7是连杆传动式水平段模型结构图;
22.图8是连杆传动式弯曲段模型结构图;
23.图9是导轨导轮组合结构图;
24.图10是连杆传动式水平段模型驱动结构图;
25.图11是连杆传动式水平段驱动单元结构图;
26.图12是连杆传动式弯曲段模型驱动结构图;
27.图13是伸缩杆式舌头仿真运动装置结构图;
28.图14是伸缩杆式水平段模型结构图;
29.图15是伸缩杆式弯曲段模型结构图;
30.图16是伸缩杆式水平段驱动单元结构图;
31.图17是伸缩杆式弯曲段驱动单元结构图。
32.图中,1—弯曲段模型,2—水平段模型,3—弹性钢板,4—拉索,5—驱动电机,6—减速电机,7—牵引座,8—牵引架,9—链轮,10—链条,11—连杆,12—导轨,13—导轮,14—固定座,15—k型附板,16—l型弯板,21—单元模型,22—四连杆曲柄滑块机构,23—伸缩杆,24—拉簧。
具体实施方式
33.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本实用新型,并不用于限定本实用新型。
34.一种全自动动物舌头仿真运动装置,包括舌体模型和驱动系统;所述舌体模型包括弯曲段模型和水平段模型,所述弯曲段模型前端与所述水平段模型后端相接,所述驱动系统包括弯曲段驱动单元和水平段驱动单元;所述弯曲段驱动单元与所述弯曲段模型相配合,控制所述弯曲段模型的弯曲与展平,所述水平段驱动单元与所述水平段模型相配合,控制所述水平段模型的前后移动。
35.所述弯曲段驱动单元通过驱动电机和弹性钢板带动所述水平段模型进行弯曲和伸直;所述弯曲段驱动单元包括驱动电机、拉索和弹性钢板,所述弯曲段模型固定安装于所述弹性钢板上方,所述拉索两端的钢丝绳两端分别连接于所述弯曲段模型的舌尖位置和所述驱动电机,通过所述驱动电机拉紧所述拉索的钢丝绳带动所述舌体模型弯曲段向上翘起,所述驱动电机处于原始状态时,通过所述弹性钢板带动所述弯曲段模型水平伸直。
36.所述水平段驱动单元与所述水平段模型相配合,通过减速电机带动所述水平段模型进行前后伸缩;所述水平段驱动单元包括三种基础结构,其一包括减速电机、链轮、链条和牵引座,所述水平段模型安装于所述牵引架上方,所述减速单机与所述链轮相连,所述链条与所述链轮相啮合,所述链条通过k型附板与所述牵引座固定相连,通过所述减速电机的转动方向带动所述牵引座沿所述链条前后移动,从而实现所述水平段模型前后移动来模拟舌头的伸缩运动。其二包括减速电机、连杆、导轨和导轮,与之相配合的所述水平段模型包括单元模型和四连杆曲柄滑块机构,所述单元模型并排安装于收缩状态的所述四连杆曲柄滑块机构上方;第一节所述四连杆曲柄滑块机构的中间立柱固定安装于固定架,最后一节所述单元模型通过l型弯板与所述导轮固定相连,所述导轨固定安装于所述舌体模型下方,所述导轮与所述导轨相接,所述减速电机与所述连杆相连,所述连杆与所述四连杆曲柄滑块机构的外转轴铰接,通过所述减速电机的转动方向带动所述四连杆曲柄滑块机构进行收缩和伸长,带动所述导轮沿所述导轨移动,从而实现水平段模型的伸缩来模拟舌头的伸缩运动。其三包括减速电机、链轮、链条和牵引架,与之相配合的所述水平段模型包括单元模型、伸缩杆和拉簧,相邻的两个所述单元模型的中间位置之间均安装所述拉簧,两根所述伸缩杆分别穿过每一个所述单元模型两侧的伸缩杆安装孔;所述单元模型的首端固定于所述固定架,末端固定于所述牵引架上方,所述减速单机与所述链轮相连,所述链条与所述链轮相啮合,所述链条通过k型附板与所述牵引架固定相连,通过所述减速电机的转动方向带动所述牵引架沿所述链条前后移动,从而带动所述水平段模型的伸缩来模拟舌头的伸缩运动。
37.实施例1
38.本实施例中所述舌体模型的弯曲段模型的舌尖部分设置为m型,所述弹性钢板性状对应设置为m型弹性钢板,所述弯曲段模型和所述m型钢板的安装位置与性状相对应,所述驱动电机和所述拉索均设有两套,所述驱动电机分别安装于所述舌体模型下方的两侧位置,所述拉索分别连接一个所述驱动电机以及所述弯曲段模型对应侧的舌尖内部,当只有一个驱动电机转动时,只有其对应一侧的所述弯曲段模型向上翘起,当两个驱动电机都不工作时,所述弯曲段模型完全水平展开。
39.实施例2
40.本实施例中的全自动动物舌头仿真运动装置,所述舌体模型的水平段模型安装于所述牵引座上面板的上方,所述弹性钢板安装于所述牵引座前端,所述弯曲段模型安装于所述弹性钢板的上方,且所述弯曲段模型的后端与所述水平段模型的前端并排相接;所述驱动电机安装于所述牵引座内部,所述拉索的套管帽穿过所述牵引座定位于所述牵引座和所述弯曲段模型的后端,所述拉索的钢丝绳穿过所述弯曲段模型内部上方的圆孔,两端分别连接所述驱动电机和所述弯曲段模型前端的舌尖内部;通过驱动电机的转动拉紧所述拉索的钢丝绳,使所述拉索与所述弹性钢板之间产生力矩,弹性钢板受力向上弯曲,从而实现舌体弯曲翘起,在驱动电机不工作时,利用所述弹性钢板的弹性,使所述弯曲段模型展平,实现舌体的水平展开。在所述链条上安装所述k型附板,所述牵引座固定安装于所述k型附板上,利用所述减速电机的转向带动所述链轮、所述链条的转动方向,从而带动所述牵引座前后移动,从而实现所述舌体伸缩运动。
41.实施例3
42.本实施例中所述弹性钢板后端安装一个l型弯板,所述l型弯板的水平面与所述弹性钢板相接,竖直面与所述水平段模型的最后一个单元模型相接;所述导轮安装于所述l型弯板的水平面下方;所述驱动电机安装于固定架上,所述拉索定位于固定架和所述弯曲段模型的后端;所述水平段模型包括单元模型和四连杆曲柄滑块机构,通过所述减速电机的转向带动所述四连杆曲柄滑块机构进行伸缩,从而实现所述水平段模型伸缩,并利用在伸缩过程中通过所述导轮沿着所述导轨进行移动,为所述水平段的伸缩提供导向和支撑,避免发生偏移。
43.实施例4
44.本实施例中所述水平段模型的前端两个单元模型下方固定安装所述牵引架,所述弹性钢板的末端安装于所述牵引架上方,所述水平段模型下方,所述弯曲段模型安装于所述弹性钢板上方,且与所述水平段模型的最后一个所述单元模型相接,所述弯曲段模型与所述水平段模型之间的间隔与所述水平段模型拉伸状态下的相邻的单元模型之间的距离相等;所述驱动电机安装于固定架上,所述拉索定位于固定架和所述弯曲段模型的后端;所述水平段模型包括单元模型、伸缩杆和拉簧,相邻的两个所述单元模型的中间位置之间均安装所述拉簧,两根所述伸缩杆分别穿过每一个所述单元模型两侧的伸缩杆安装孔;所述链条上安装所述k型附板,所述牵引架固定安装于所述k型附板上,利用所述减速电机的转向带动所述链轮、所述链条的转动方向,从而带动所述牵引座前后移动,通过所述牵引架对所述舌体模型进行支撑,并通过所述伸缩杆进行移动导向,从而实现所述舌体伸缩运动。
45.通过采用本实用新型公开的上述技术方案,得到了如下有益的效果:
46.本实用新型公开了一种全自动动物舌头仿真运动装置,通过将舌头模型进行功能划分,可以灵活的模拟舌头的运动动作,解决了目前机械模型中舌头不能配合设备整体动作的问题,解决了机械模型的舌头的动作僵直、呆板的问题;本实用新型在整体设备的嘴部闭合时收回口腔内部,从而增加机械模型整体设备进行表演时的灵活性、观赏性和趣味性。
47.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1