用于连接模块化拼装座的接口板的制作方法
1.本实用新型涉及智能制造设备领域,具体涉及用于连接模块化拼装座的接口板。
背景技术:
2.智能制造设备是先进技术,标准规范,职业态度,工匠精神的承载平台,是学生学习的标杆和示范。在智能制造领域的教学设备方向,学生最终通过反复的学习操作教学设备而获得相关技能职业教育技能培养的,专业建设,课程建设,三教改革等等最终落到教学设备去表达,教学设备是教学实施的最后一公里。职业教育培养大国工匠,教学设备是培养大工工匠的重要基石。
3.国内外一些比较具有代表性的教学设备如下:
4.1、“festo didactic体系”5.festo ag&co.kg是世界上最著名的气动元件、组件和系统的生产厂商,其festo didactic体系产品与服务项目为全部自动化技术领域提供快速学习和快速记忆的解决方案:这套体系拥有气动、电子气动、液压、电子液压、电子、电动工程、传感器、机器人、数控技术、plc及现场总线技术、制造技术、工艺工程以及机电一体化。
6.还比如:“sx-815q机电一体化综合实训设备”,该设备由三向教学仪器制造股份有限公司设计制造,该设备主要由颗粒上料单元、加盖拧单元、检测分拣单元、工业机器人搬运单元和智能仓储单元组成,包括了智能装配、自动包装、自动化立体仓储及智能物流、自动检测质量控制、生产过程数据采集及控制系统等,是一个完整的智能工厂模拟装置。应用了工业机器人技术、plc控制技术、变频控制技术、伺服控制技术、工业传感器技术、电机驱动技术等工业自动化相关技术,可实现空瓶上料、颗粒物料上料、物料分拣、颗粒填装、加盖、拧盖、物料检测、瓶盖检测、成品分拣、机器人抓取入盒、盒盖包装、贴标、入库等智能生产全过程。
7.对于上述过于庞大的设备,具有的缺陷是:新技术融合过多、过复杂,教师无法迅速掌握设备;过于庞大,同工序无法给学生提供多个工位,学生不能独立操作;采购成本高,维护困难,维护成本高昂;学生的人身安全,实训安全风险高。
8.2、“汇博
‑‑
hbhx-rcps-c10”9.该实训平台主要由6关节型关节机器人单元、agv移动机器人、智能视觉统检测识别单元、码垛机器人智能仓储单元、工件流水线单元、装配流水线单元以及主控系统单元组成。
10.3、“汇博—工业机器人应用编程实训系统”11.工业机器人应用编程实训系统模块化设计,可组合进行初级、中级、高级三个1+x工业机器人应用编程等级的项目实训,依次递进,高级别涵盖低级别技能要求。用户可单桌面应用进行基础实训考核,也可以双桌面拼接实现双机器人协作实训考核。系统融入工业机器人技术、机械传动技术、电子电工技术、多种作业技术、智能传感技术、可编程控制技术、机器视觉技术、计算机技术、串口通信技术、以太网通讯技术等先进制造技术,涵盖工业
机器人、机械设计、电气自动化、智能传感、智能制造等多门学科的专业知识。
12.4、华航唯实
‑‑
工业机器人操作与运维工作站chl-kh01
13.华航唯实chl-kh01工业机器人操作与运维工作站以符合《工业机器人操作与运维职业技能等级标准》考核内容为设计标准,采用模块化配置思路,主要包括机器人单元、装配单元、视觉单元、涂胶单元、码垛单元、快换工具单元、打磨单元、焊接单元、去毛刺单元、仓库单元、人机交互单元、plc单元、离线编程单元、桌面平台单元以及气泵等。根据训练及考核任务,可快速更换不同模块,实现不同难度不同技能点的考核。部分功能采用冗余设计,学生可通过多种不同路径完成同一任务。
14.5、华航唯实
‑‑
智能制造单元系统集成平台chl-ds-11
15.华航唯实chl-kh11-z1智能制造单元系统集成应用平台,以汽车零部件(轮毂)的打磨、检测、分拣等工序为背景,采用高度模块化单元自由组合理念设计,主要包括执行单元、仓储单元、视觉检测单元、打磨单元、工具单元、分拣单元、rfid模块、总控单元等硬件单元,可快速更换组合不同单元模块。
16.现在的智能制造教学设备没有相关标准,且产业及生产销售没有门槛标准,以上述几种设备为例,虽然它们强调了模块化,集成化,融合多种智能制造模块,具有多个专业的教学功能,但是设备功能质量差异巨大,互换性差。并且各个模块之间没有互换性,很多模块的基础座子或者安装连接板都需要单独设计,单独存放,造成附加连接座很多,甚至一个模块只能专用,通用性差,这样连接座一多,模块一多,专座专用就造成整套设备非常累赘,很多模块及连接座需要设计架子来摆放,又造成占地面积多,设备庞大后又不能满足更多学生占位学习,就背离了教学的意义。
技术实现要素:
17.为解决上述技术问题,本实用新型的目的在于提供用于连接模块化拼装座的接口板,该装置是一款高度模块化、标准化、通用性好、互换性好、耗损少、维护少、成本低、升级方便的智能制造教学设备,解决了教学设备阻碍智能制造人才培养的问题,能够更多、更好的培养智能制造高技能人才。
18.为了实现上述目的,本实用新型的技术方案如下:
19.用于连接模块化拼装座的接口板,模块化拼装座包括底座板,底座板上设有定位销孔和强磁,其特征在于:接口板包括等间距安装在机台台面上的连接公板,在靠近机台边沿的连接公板的外边侧还设有连接边板,连接边板与连接公板对接的侧边长度相等,连接公板上设有定位销,所述底座板通过定位销孔配合定位销、强磁吸附力安装在连接公板,或连接公板与连接边板上;并且,相邻两个连接公板的定位销的间隔距离等于同一个底座板上两个定位销孔之间的间隔距离。
20.进一步的,所述定位销的直线间隔距离等于对角线间隔距离。无论底座板怎么与连接公板和连接边板安装,都能使得定位销孔对接在定位销中。
21.所述连接公板、连接边板和底座板上均设有安装螺纹孔。利用定位销定位后,利用强磁可以快速安装,还可以采用螺栓加强连接强度。
22.底座板不仅可以直接安装在连接公板上,利用固定的规格尺寸和固定的孔位,使得底座板跨步安装在相邻两个连接公板上。或者是,所述底座板跨步安装在连接公板和连
接边板上。由于模块化拼装座上要固定安装不同体积的机械结构,所以需要不同长度的拼装座,那么就需要不同长度的底座板,为了实现互通性,使其拼装座无论在哪个位置处,都能使其快速对接在连接公板和连接边板上,由此设计了具有共用性的连接公板和连接边板。
23.进一步的,所述底座板、连接公板和连接边板均为矩形。
24.具体的,所述底座板为长方形,其长度不超过水平安装的三个等距离布置连接公板的总长度,实现底座板与连接公板之间的一对二的跨步安装,或者一对三的跨步安装。
25.或者是可以直接相互一对一匹配安装,无需跨步安装,所述底座板和连接公板为正方形。
26.所述连接边板为长方形,其中一边的长度等于连接公板的长度,且连接边板的宽度小于其长度。以上特征,使得连接边板和连接公板的长度、宽度、高度尺寸形成了标准,与底座板之间的联结部位或联结件的尺寸协调有序,保证了教学设备整体协调、节省空间和美观实用。
27.本实用新型与现有技术相比的有益效果是:由于整台积木式教学设备涉及到了机械、控制、自动化机器人、工具、仓储、检测、加工等几大类内容,需要完成工业机器人类课程、plc电气控制类课程、自动化生产线类课程、智能制造类课程的教学,在变幻不同的教学场景时,要切换不同的模块进行安装,本次设计了专用的、各个模块拼装座能随意组装的基础接口板,将多个功能模块均能使用的接口板标准化、统一化,使得各个模块拼装座能够积木一样快速、准确、高效的组合,既解决了现有技术中各个模块组装不能互换的技术问题,还解决了各个模块组装不能互换所带来的整套设备累赘的技术问题,简化设备体积,在教学时能快速完成功能模块的更换,提高了教学效率。在制造业行业也能形成标准化、通用化。
附图说明
28.图1为模块化拼装座的立体结构示意图;
29.图2为接口板的使用状态的立体结构示意图;
30.图3为模块化拼装座安装在机台上的立体结构示意图;
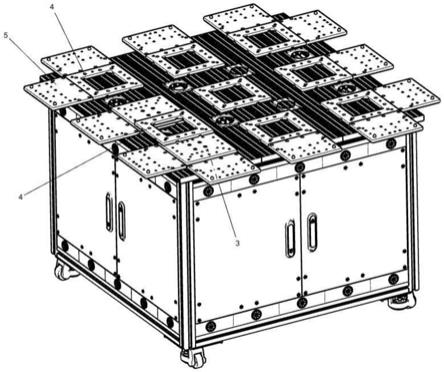
31.图4为第二实施例中模块化拼装座安装在接口板和机台上的立体结构示意图;
32.图5为第二实施例中模块化拼装座安装在接口板和机台上的立体结构示意图;
33.图6为接口板的另一种使用状态的立体结构示意图。
具体实施方式
34.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例进一步阐述本实用新型。
35.如图1所示的用于连接模块化拼装座的接口板,模块化拼装座包括底座板3、支架2和桌面板1,所述底座板3上竖直固定着支架2,其桌面板1平行于底座板3固定在支架2顶端,所述桌面板1为矩形,桌面板1的板面投影面积大于底座板3的板面投影面积,桌面板3的板面上为机械结构区域,主要安装功能模块的机械机构,桌面板1与底座板3之间为电气区域,主要安装机械功能模块的电气结构,电气接口架20悬挂在支架2上。
36.桌面板有三个标准规格:
37.1、桌面板的长度和宽度相等,尺寸为320mm
×
320mm。
38.2、桌面板为长方形,尺寸为320mm
×
640mm。
39.3、桌面板为长方形,尺寸为320mm
×
960mm。在桌面板1上主要安装比较长的机架机构,比如传输带。
40.如图3所示,底座板3的设计就是为了所需功能模块的拼装座能快速对接安装在机台6上,底座板3上设有定位销孔31和强磁孔32,强磁孔32内嵌有强磁,无需额外多余的螺栓,便能快速对接在连接公板4和连接边板5上。
41.具体的,接口板包括等间距安装在机台6台面上的连接公板5,在靠近机台6边沿的连接公板4的外边侧还设有连接边板5,连接边板5与连接公板4对接的侧边长度相等,连接公板4上设有定位销40,所述底座板4通过定位销孔31配合定位销、强磁吸附力安装在连接公板4上,所述定位销40的直线间隔距离等于对角线间隔距离。
42.并且,相邻两个连接公板4的定位销的间隔距离等于同一个底座板3上两个定位销孔31之间的间隔距离,在本设计中,定位销孔的间距均为160cm。即底座板3能跨步安装在相邻两个连接公板4上,相邻的两个连接公板4的相邻边上,其定位销40的间隔距离也等于同一个连接公板4上的间隔距离,机台6上的每块连接公板4无论从横向还是纵向,其分布间距都是相等的,无论底座板和连接公板,或者是连接公板与连接边板怎么组合安装,定位销孔都能重合,体现了设计的标准化和互通性,使得各个模块相互之间更换位置也能快速安装。
43.一般情况下,底座板3的对接安装只需要定位销40和强磁足以,特殊情况下需要螺栓连接加固,所以连接公板4、连接边板5和底座板3上均设有安装螺纹孔30,比如多轴机器人在旋转时,旋转时需要底座保持平衡,避免倾倒。尽管需要螺栓紧固,也不需要定位,标准尺寸使得模块更换时,直接利用定位销40定位,强磁能瞬间吸附在不锈钢材质的连接公板4和连接边板5上,避免找位而浪费时间。连接边板在机台边沿,可用于安装操作面板、电脑、显示屏等设备,便于人工操控和数据的监控。
44.具体的,如图3、图4、图5所示,为实现模块化,便于三种规格的拼装座安装,所述底座板3为长方形,其长度不超过水平安装的三个等距离布置连接公板4的总长度,底座板3跨步安装在相邻两个连接公板4上。该设计实施例用于安装尺寸为320mm
×
640mm或者尺寸为320mm
×
960mm的拼装座。连接公板和底座板上定位销与定位销孔的间距均为160cm,连接边板的宽度也等于定位销的间距,连接边板的长度与连接公板、底座板的长度相同。
45.具体的,如图2所示,本设计的另一实施例为:所述底座板3和连接公板4均为正方形,所述底座板3跨步安装在连接公板4和连接边板5上,连接边板5为长方形,其中一边的长度等于连接公板4的长度,且连接边板5的宽度小于其长度。该设计实施例用于安装尺寸为320mm
×
320mm的拼装座。
46.另外,底座板3的基础长度和宽度均为200mm,长方形的底座板,其宽度不变均为200mm,其长度在200mm的基础上加上桌面板320mm的长度即可,在本设计中,底座板的规格分别为200
×
200mm、200
×
520mm、200
×
840mm。
47.以上所涉及的材料为铝合金,利用强磁具有吸附力,快速吸紧固定,铝合金材质的设备不生锈、维护成本低,支架和桌面板可采用铝合金型材,不用加工,直接型材切断即可安装,加工成本低。
48.另外,如图6所示,其连接公板4和两个连接边板5还可以单独使用支架和滑轮组成简易支架,放在地上用作滑板车使用,便于快速转运模块化拼装座。
49.以上对本实用新型提供的用于连接模块化拼装座的接口板进行了详细介绍。具体实施例的说明只是用于帮助理解本实用新型的方法及其核心思想,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1