一种机电一体化实验平台
1.本实用新型属于机电一体化实验领域,具体涉及一种机电一体化实验平台。
背景技术:
2.为了适用机电实验教学的需要,可进行综合性实验的机电控制实验平台的需求日益剧增。目前,大多数的机电控制实验平台的实验种类单一,不能通过一台实验设备进行多种类的实验,现有的实验平台中涉及电机种类少、测试方式不全、无实际应用场景等问题。
3.为了让学生在实验过程中更能了解电器元件在实际工厂环境中的应用和功能,一台综合性的、多功能的、多模块的机电一体化实验平台更能满足教学需求。
技术实现要素:
4.本实用新型所要解决的技术问题便是针对上述现有技术的不足,提供一种机电一体化实验平台,解决现有实验平台中电机种类不全、测试方式不全、无实际应用场景、交互能力差等问题。
5.本实用新型所采用的技术方案是:一种机电一体化实验平台,包括实验平台本体,所述实验平台本体上表面分别设有行架运输组件、传送带组件、电机测试组件和电源电控组件,所述传送带组件设置于行架运输组件下方,所述行架运输组件上设有执行器,所述行架运输组件、传送带组件、电机测试组件和执行器分别与电源电控组件电气连接。
6.其中一个实施例中,所述行架运输组件包括支撑架和设置于支撑架上的数个沿不同方向位移且相互连接的直线模组,数个所述直线模组包括但不限于沿y轴方向位移的第一直线模组、沿x轴方向位移的第二直线模组和沿z轴方向位移的第三直线模组中的至少其中一种,所述执行器与其中一直线模组连接且随直线模组位移,所述支撑架侧面设有摄像组件,所述支撑架下方设有置物仓。
7.其中一个实施例中,数个所述直线模组均包括丝杠、滑轨、与丝杠连接且驱动丝杠转动的旋转驱动电机和设置于丝杠上的导轨滑块,所述滑轨两端均设有限位开关,所述导轨滑块与滑轨连接且随丝杠转动而沿滑轨位移,所述导轨滑块与其余所述直线模组或执行器连接。
8.其中一个实施例中,所述传送带组件包括传送带、设置于传送带两端且带动传送带运行的滚筒和与滚筒连接且驱动滚筒运行的传送驱动电机,所述传送带侧面设有置物平台,所述传送带下方设有编码器。
9.其中一个实施例中,所述电机测试组件包括扭矩传感器,所述扭矩传感器两端分别通过联轴器连接有待测电机和负载装置。
10.其中一个实施例中,所述电源电控组件包括供电组件、传送驱动电机驱动器、负载驱动器、变频器、plc、旋转驱动电机驱动器、上位机和按钮,所述plc分别与供电组件、传送驱动电机驱动器、负载驱动器、变频器、旋转驱动电机驱动器、上位机和按钮电气连接,所述旋转驱动电机驱动器、传送驱动电机驱动器、负载驱动器和变频器分别与旋转驱动电机、传
送驱动电机、负载装置和待测电机电气连接,所述执行器、摄像组件、限位开关和编码器均与plc连接,所述扭矩传感器与上位机电气连接。
11.其中一个实施例中,所述plc通过继电器与分别与传送驱动电机驱动器、负载驱动器、变频器、旋转驱动电机驱动器、上位机、执行器、摄像模组、限位开关和编码器电气连接。
12.其中一个实施例中,所述供电组件包括24v端子、220v端子、空开电源、熔断器和交流接触器,所述24v端子和220v端子均与空开电源电气连接,所述空开电源、熔断器和交流接触器依次电气连接,所述交流接触器与plc电气连接,所述24v端子的输入端上电气连接有24v电源。
13.其中一个实施例中,所述执行器为开合夹具、吸附夹具或旋转开合夹具中的一种或数种。
14.本实用新型的有益效果在于:
15.1、多模块化的设计,能进行更多的电机控制实验;
16.2、实验平台集成了多种功能,既节约了空间,又满足了多功能的需求;
17.3、能够模拟工厂中的电器元件应用环境,直观的展示实验效果,能使学生更能理解电器元件的工作原理,能进行现有高校本科学习的所有电机控制实验。
附图说明
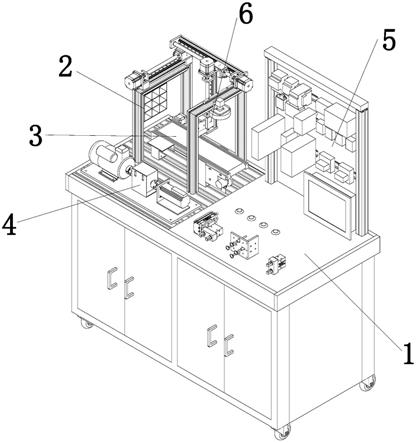
18.图1为本实用新型结构示意图;
19.图2为本实用新型行架运输组件结构示意图;
20.图3为本实用新型直线模组结构示意图;
21.图4为本实用新型传送带组件结构示意图;
22.图5为本实用新型电机测试组件结构示意图;
23.图6为本实用新型电源电控组件结构示意图;
24.图7为本实用新型控制框图。
25.图中:1、实验平台本体;2、行架运输组件;3、传送带组件;4、电机测试组件;5、电源电控组件;6、执行器;21、支撑架;22、直线模组;23、摄像组件;24、置物仓;221、丝杠;222、滑轨;223、旋转驱动电机;224、导轨滑块;225、限位开关;31、传送带;32、滚筒;33、传送驱动电机;34、置物平台;35、编码器;41、扭矩传感器;42、联轴器;43、待测电机;44、负载装置;51、供电组件;52、传送驱动电机驱动器;53、负载驱动器;54、变频器;55、plc;56、旋转驱动电机驱动器;57、上位机;58、按钮;59、继电器;511、24v端子;512、220v端子;513、空开电源;514、熔断器;515、交流接触器;516、24v电源。
具体实施方式
26.下面将结合附图及具体实施例对本实用新型作进一步详细说明。
27.如图1-图7所示,一种机电一体化实验平台,包括实验平台本体1,所述实验平台本体1上表面分别设有行架运输组件2、传送带组件3、电机测试组件4和电源电控组件5,所述传送带组件3设置于行架运输组件2下方,所述行架运输组件2上设有执行器6,所述行架运输组件2、传送带组件3、电机测试组件4和执行器6分别与电源电控组件5电气连接。
28.本实用新型中,行架运输组件2、传送带组件3和电机测试组件4可拆卸连接于实验
平台本体1上表面,需要实验时,再进行安装,不需要实验时,可放置于实验平台本体1的柜体中。同时,行架运输组件2、传送带组件3和电机测试组件4通过连接线与电源电控组件5连接,实验时根据需求接线即可。
29.本实施例中,所述行架运输组件2包括支撑架21和设置于支撑架21上的数个沿不同方向位移且相互连接的直线模组22,数个所述直线模组22包括但不限于沿y轴方向位移的第一直线模组、沿x轴方向位移的第二直线模组和沿z轴方向位移的第三直线模组中的至少其中一种,所述执行器6与其中一直线模组22连接且随直线模组22位移,所述支撑架21侧面设有摄像组件23,所述支撑架21下方设有置物仓24。
30.摄像组件23设置于传送带组件3运行方向的末端,可较为精确的定位传送带组件3上货物的具体位置。置物仓24设置于远离摄像组件23的一端,防止两者相互之间的干扰。本技术的直线模组22为数个且其位移方向均不同。实际使用时,可根据实验的需求选择不同的直线模组22。直线模组22的数量至少为一个。本技术中x轴方向为机电一体化实验平台的长度方向,传送带组件3的运行方向沿x轴方向设置;y轴方向为机电一体化实验平台的宽度方向;z轴方向为机电一体化实验平台的高度方向且垂直于传送带组件3设置。通过xyz三轴方向的位移,可保证随直线模组22运行的执行器6的移动更加的精确。
31.本实施例中,数个所述直线模组22均包括丝杠221、滑轨222、与丝杠221连接且驱动丝杠221转动的旋转驱动电机223和设置于丝杠221上的导轨滑块224,所述滑轨222两端均设有限位开关225,所述导轨滑块224与滑轨222连接且随丝杠221转动而沿滑轨222位移,所述导轨滑块224与其余所述直线模组22或执行器6连接。
32.限位开关205的设置除限制导轨滑块204的位移位置之外,还能获取旋转驱动电机223运行数据。
33.本实施例中,所述传送带31组件3包括传送带31、设置于传送带31两端且带动传送带31运行的滚筒32和与滚筒32连接且驱动滚筒32运行的传送驱动电机33,所述传送带31侧面设有置物平台34,所述传送带31下方设有编码器35。
34.编码器35的设置可以实时获取传输带31的传送速度,通过此获取的传送速度,可通过传送驱动电机33转速的变化来实现传输带31传送速度的改变。
35.本实施例中,所述电机测试组件4包括扭矩传感器41,所述扭矩传感器41两端分别通过联轴器42连接有待测电机43和负载装置44。
36.本实施例中,所述电源电控组件5包括供电组件51、传送驱动电机驱动器52、负载驱动器53、变频器54、plc55、旋转驱动电机驱动器56、上位机57和按钮58,所述plc55分别与供电组件51、传送驱动电机驱动器52、负载驱动器53、变频器54、旋转驱动电机驱动器56、上位机57和按钮58电气连接,所述旋转驱动电机驱动器56、传送驱动电机驱动器52、负载驱动器53和变频器54分别与旋转驱动电机223、传送驱动电机33、负载装置44和待测电机43电气连接,所述执行器6、摄像组件25、限位开关205和编码器35均与plc55连接,所述扭矩传感器41与上位机57电气连接。
37.电源电控组件5中,供电组件51与plc55连接且为各用电组件供电;旋转驱动电机驱动器56、传送驱动电机驱动器52、负载驱动器53和变频器54分别与旋转驱动电机223、传送驱动电机33、负载装置44和待测电机43电气连接,以接收plc55的控制信号并分别控制上述各电机的运行;上位机57将获取的各数据进行显示且可通过其设置上述各电机的运行参
数;按钮58用于负载装置44的停止、开启、正转和反转。
38.本实施例中,所述plc55通过继电器59与分别与传送驱动电机驱动器52、负载驱动器53、变频器54、旋转驱动电机驱动器56、上位机57、执行器6、摄像模组、限位开关205和编码器35电气连接。
39.本实施例中,所述供电组件51包括24v端子511、220v端子512、空开电源513、熔断器514和交流接触器515,所述24v端子511和220v端子512均与空开电源513电气连接,所述空开电源513、熔断器514和交流接触器515依次电气连接,所述交流接触器515与plc55电气连接,所述24v端子511的输入端上电气连接有24v电源516。
40.本平台的电源分为24v和220v,24v单独设置24v电源516供电;220v与市电连接。两种电源根据需求进行选择。
41.本实施例中,所述执行器6为开合夹具、吸附夹具或旋转开合夹具中的一种或数种。
42.执行器6的种类根据需要展开的各实验的需求进行选择。其中,开合夹具为具有开合与夹取功能的夹具,可以为气动夹具、电动夹具等。吸附夹具为具有吸附功能的夹具,可以为吸盘、电磁铁等。旋转开合夹为具有开合与夹取功能且同时具有旋转功能的夹具,可以为旋转气动夹具、旋转电动夹具等。
43.本实用新型中,所述的旋转驱动电机223、传送驱动电机33和待测电机43包括但不限于步进电机、直流电机、伺服电机和三相电机。负载装置44包括电机,当负载装置44为电机时,其包括但不限于步进电机、直流电机、伺服电机和三相电机。
44.利用本实用新型公开的一种机电一体化实验平台,可以进行机电一体化实验,其包括以下步骤:
45.步骤10、连接机电一体化实验平台各部件,如进行旋转驱动电机223控制试验,进入步骤20,如进行行架货物堆放实验,进入步骤40,如进行行架货物分拣实验,进入步骤70,如进行负载装置44控制实验,进入步骤100,如进行待测电机43控制实验,进入步骤120,如进行待测电机43与负载装置44对拖实验,进入步骤140;
46.步骤20、plc55通过旋转驱动电机驱动器56控制旋转驱动电机223运行,进入步骤30;
47.步骤30、限位开关225实时获取旋转驱动电机223运行数据并输出至plc55,plc55将接收到的运行数据输出至上位机57并通过上位机57显示;
48.步骤40、将实验所需的货物放置于传送带31上,根据需求选择直线模组22并将选择的直线模组22相互连接,将执行器6设置于其中一直线模组22上,plc55通过传送驱动电机驱动器52控制传送驱动电机33运行,传送驱动电机33通过滚筒32带动传送带31运行,进入步骤50;
49.步骤50、摄像组件23持续获取传送带31上的影像数据并将获取的影像数据输出至plc55,plc55根据获取的影像数据通过旋转驱动电机驱动器56控制旋转驱动电机223运行,数个相互连接的直线模组22带动执行器6位移至货物上方,plc55控制执行器6打开并抓取货物,进入步骤60;
50.步骤60、plc55通过旋转驱动电机驱动器56控制旋转驱动电机223运行,数个相互连接的直线模组22带动执行器6位移至置物平台34上方,plc55控制执行器6打开,将货物放
置于置物平台34上;
51.步骤70、将实验所需的货物放置于传送带31上,根据需求选择直线模组22并将选择的直线模组22相互连接,将执行器6设置于其中一直线模组22上,plc55通过传送驱动电机驱动器52控制传送驱动电机33运行,传送驱动电机33通过滚筒32带动传送带31运行,进入步骤80;
52.步骤80、摄像组件23持续获取传送带31上的影像数据并将获取的影像数据输出至plc55,plc55根据获取的影像数据通过旋转驱动电机驱动器56控制旋转驱动电机223运行,数个相互连接的直线模组22带动执行器6位移至货物上方,plc55控制执行器6打开并抓取货物,进入步骤90;
53.步骤90、plc55通过旋转驱动电机驱动器56控制旋转驱动电机223运行,数个相互连接的直线模组22带动执行器6位移至与置物仓24对应的位置,plc55控制执行器6旋转和打开,将货物放置于置物仓24内;
54.步骤100、plc55通过负载驱动器53控制负载装置44运行,进入步骤100;
55.步骤110、扭矩传感器41实时获取负载装置44运行数据,输出至上位机57并通过上位机57显示;
56.步骤120、plc55通过变频器54控制待测电机43运行,进入步骤130;
57.步骤130、扭矩传感器41实时获取待测电机43运行数据,输出至上位机57并通过上位机57显示;
58.步骤140、plc55分别通过负载驱动器53和变频器54控制负载装置44和待测电机43运行,负载装置44运行过程中,plc55通过负载驱动器53调节负载装置44转矩,进入步骤150;
59.步骤150、扭矩传感器41实时获取待测电机43运行数据,输出至上位机57并通过上位机57显示。
60.本实验平台可进行旋转驱动电机223控制试验、行架货物堆放实验、行架货物分拣实验、负载装置44控制实验、待测电机43控制实验和待测电机43与负载装置44对拖实验等数种实验。
61.旋转驱动电机223控制试验中,通过高低电平控制旋转驱动电机223旋转的方向,通过plc55产生的高频脉冲控制旋转驱动电机223旋转的速度和距离,以获取旋转驱动电机223的性能曲线。本实验中,通过24v端子511和24v电源516供电。
62.行架货物堆放实验和行架货物分拣实验中,plc55通过传送驱动电机驱动器52产生pwm波控制传送驱动电机33转动,从而通过滚筒32带动传送带31运行。同时,plc55通过旋转驱动电机驱动器56控制旋转驱动电机223的旋转方向和圈数,从而实现执行器6在xyz三轴上的移动。两实验中,执行器6分别选择开合夹具和旋转开合夹具。两实验中,均通过24v端子511和24v电源516供电。
63.负载装置44控制实验中,可分为4类实验。具体如下:
64.1、寸动模式:通过按钮58和plc55控制负载装置44的停止、开启、正转和反转;
65.2、位置模式:plc55通过控制脉冲的输入数量控制负载装置44旋转的位置;
66.3、扭矩模式:plc55通过控制外界的电流控制负载装置44扭矩的大小;
67.4、速度模式:plc55通过电压和扭矩传感器41的反馈调节负载装置44的转速。
68.上述4类实验,均通过扭矩传感器41获取运行数据,生成性能曲线并在上位机57显示。本实验中,通过220v端子512和市电供电。
69.待测电机43控制实验中,通过plc55和变频器54调节输入电源频率,从而调节待测电机43内电场的旋转频率,进而调节待测电机43的机械转速、转矩等参数。上位机57获取待测电机43的运行数据,生成输入电源频率与待测电机43转速之间的关系并绘制曲线。本实验中,可通过上位机57设置参数。本实验中,通过220v端子512和市电供电。
70.待测电机43与负载装置44对拖实验中,通过plc55控制负载驱动器53输出的电流大小,从而控制负载装置44的转矩,通过控制负载装置44的转矩模拟现实环境中待测电机43的负载,从而得到待测电机43在不同负载情况或者变负载情况下待测电机43的特性曲线。本实验中,可通过上位机57设置参数。本实验中,通过220v端子512和市电供电。
71.以上所述实施例仅表达了本实用新型的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1