多旋翼无人机故障检修教学系统的制作方法
1.本发明涉及无人机故障检修技术领域,具体为多旋翼无人机故障检修教学系统。
背景技术:
2.多旋翼无人机故障检修教学系统是针对无人机初学者设计的一款故障排查检修系统,通过创新性的电路设计,将多旋翼无人机各个模块分布在面板上,并且可以一键模拟动力系统、飞控系统、供电系统、链路系统四大系统数十个故障。
3.通过学习和操作可以认识多旋翼无人机常见的故障现象,使用附带的排故工具可以查找故障线路,并且针对故障线路进行快速维修,可以让初学者掌握排除故障的基本思路和逻辑,但是现有的无人机故障检修教学系统结构复杂,不方便进行携带,无法将多旋翼无人机系统的结构、布局、线路关系剖析开直观展示在学生面前,从而使用比较局限。
技术实现要素:
4.本发明的目的在于提供多旋翼无人机故障检修教学系统,以解决上述背景技术中提出的现有的无人机故障检修教学系统结构复杂,不方便进行携带,无法将多旋翼无人机系统的结构、布局、线路关系剖析开直观展示在学生面前,从而使用比较局限的问题。
5.为实现上述目的,本发明提供如下技术方案:多旋翼无人机故障检修教学系统,包括箱体和箱盖,所述箱体与箱盖之间转动连接,所述箱盖的内部设置有充电器,所述充电器的下端设置有遥控器,所述遥控器的左端设置有线材收纳盒,所述遥控器的右端设置有万用表,所述箱体的内部设置有m1电机,所述m1电机的左端设置有pmu电源模块,所述pmu电源模块的左端设置有mcu主控模块,所述mcu主控模块的左端设置有led灯模块,所述led灯模块的左端设置有rc s-bus接收机,所述rc s-bus接收机的左端设置有m2电机,所述m2电机的下端设置有m2电机电调,所述m2电机电调的下端设置有m3电机电调,所述m3电机电调的下端设置有m3电机,所述m3电机的右端设置有动力锂电池,所述动力锂电池的右端设置有中心分电板,所述中心分电板的右端设置有gps指南针模块,所述gps指南针模块的下端设置有系统总开关,所述系统总开关的右端设置有m4电机,所述m4电机的上端设置有m4电机电调,所述m4电机电调的上端设置有故障设置舱门锁,所述故障设置舱门锁的上端设置有m1电机电调,所述m1电机电调的右端设置有故障设置舱门。
6.优选的,所述遥控器包括触摸显示屏,所述触摸显示屏的左端和右端均设置有电源开关,所述触摸显示屏的上端设置有吊环,所述吊环的左端和右端分别设置有左摇杆和右摇杆,所述遥控器前侧壁的上端设置有移动支架,所述移动支架的左端设置有开关a,所述开关a的右端设置有开关b,所述移动支架的右端设置有开关c,所述开关c的右端设置有开关d,所述遥控器上侧壁的左端设置有旋钮a,所述遥控器上侧壁的右端设置有旋钮b,所述遥控器后侧壁的上端固定设置有提手,所述提手下方的右端设置有第一按键,所述第一按键的左端设置有第二按键,所述第一按键和第二按键的下端设置有电池后盖,所述遥控器的下侧壁设置有usb接口,所述usb接口的右端设置有ps/2接口,所述遥控器的详细参数
为:通道:10通道;发射功率:<20dbm;频率范围:2.4055-2.475ghz;2.4g模式:增强型自动跳频数字系统;波段宽度:500khz;编码方式:gsfk;波段个数:140个;通道分辨率:4096级;天线类型:内置双天线;外形尺寸:179mm x 81mmx 161mm;显示屏:电容触摸屏;机身重量:410g;语言:中英文;最低工作电压:4.2v;模拟器:usb模拟器;使用电池:2s电池;温度范围:-10℃—+60℃;认证ce,rcm,fccid:n4zflyskyi6s;湿度范围:20%-95%。
7.优选的,所述万用表包括数字式表头,所述数字式表头的下端设置有转换开关,所述转换开关的左端设置有黑色表笔,所述转换开关的右端设置有红色表笔。
8.优选的,所述动力锂电池的参数为:容量:3300mah充电截止电压:12.6v;放电倍率:25c;持续放电:82.5a;电压:11.1v;成品尺寸(厚*宽*长mm):24.16*42.40*138.28;建议充电电流:6.6a(2c);最大充电电流:16.5a(5c);重量:296g。
9.与现有技术相比,本发明的有益效果是:
10.本系统采用便携设计,将多旋翼无人机系统的结构、布局、线路关系剖析开,直观展示在学生面前,满足无人机专业及无人机装调检修工新职业的职业技能的训练要求,并根据所有常见故障配备有相关的实训教学课程资源,使用方便,且直接反映故障检修教学,可以方便学生更好的学习。
附图说明
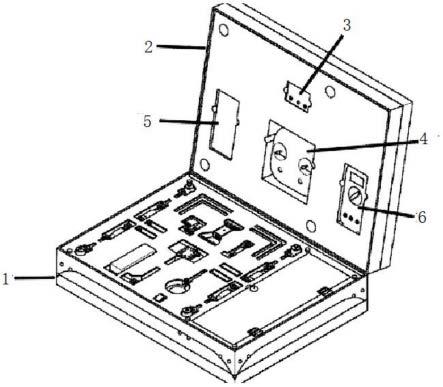
11.图1为本发明整体结构示意图;
12.图2为图1中箱体的结构示意图;
13.图3为遥控器的结构示意图;
14.图4为图3的背面结构示意图;
15.图5为图3的底部结构示意图;
16.图6为万用表的结构示意图;
17.图7为gps指南针模块控制模式表格图;
18.图8为gps指南针模块指南针校准表格图。
19.图中:1箱体、2箱盖、3充电器、4遥控器、5线材收纳盒、6万用表、7m1电机、8pmu电源模块、9mcu主控模块、10led灯模块、11rc s-bus接收机、12m2电机、13m2电机电调、14m3电机电调、15m3电机、16中心分电板、17gps指南针模块、18系统总开关、19m4电机、20m4电机电调、21故障设置舱门锁、22m1电机电调、23故障设置舱门、24触摸显示屏、25电源开关、26吊环、27左摇杆、28右摇杆、29移动支架、30开关a、31开关b、32开关c、33开关d、34旋钮a、35旋钮b、36提手、37第一按键、38第二按键、39电池后盖、40usb接口、41ps/2接口、42数字式表头、43转换开关、44黑色表笔、45红色表笔、46动力锂电池。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
22.实施例:
23.请参阅图1-8,本发明提供一种技术方案:多旋翼无人机故障检修教学系统,包括箱体1和箱盖2,箱体1与箱盖2之间转动连接,箱体1是系统主体,将多旋翼无人机系统的各个模块按照规定连接逻辑展示在学习者面前,方便学习者观察模块状态,识别故障现象、查找故障线路、排除故障,箱体面板内部是复杂的线路设计,箱盖2的内部设置有充电器3,充电器3的下端设置有遥控器4,遥控器4的左端设置有线材收纳盒5,遥控器4的右端设置有万用表6,箱体1的内部设置有m1电机7,m1电机7的左端设置有pmu电源模块8,pmu电源模块8解决了多旋翼系统高功耗的问题,为整个naza-m lite系统以及其他电子设备供电并监视电源,pmu电源模块8的左端设置有mcu主控模块9,mcu主控模块9是系统的核心,通过它将电子调速器和遥控接收机等设备连接起来从而实现自动驾驶功能,其中的imu(惯性测量单元)包含3轴加速度计、3轴陀螺仪和气压高度计用于识别姿态和高度,该模块在安装时尽量靠近无人机重心,按照模块箭头指示超正前方安装,mcu主控模块9的左端设置有led灯模块10,led灯模块10包括了一个用于显示naza-m lite各种状态的led和用于调参以及固件升级的usb口,led灯通过不同的灯色和闪烁模式表示飞控系统的状态,学员需熟记下表中所有led灯的指示灯语,led灯模块10的左端设置有rc s-bus接收机11,rc s-bus接收机11的左端设置有m2电机12,m2电机12的下端设置有m2电机电调13,m2电机电调13的下端设置有m3电机电调14,m3电机电调14的下端设置有m3电机15,m3电机15的右端设置有动力锂电池46,动力锂电池46的右端设置有中心分电板16,中心分电板16的右端设置有gps指南针模块17,gps指南针模块17用于识别无人机的位置和方向,内置的led用来指示其工作状态,内置的指南针模块容易受到外界磁场干扰,磁性物体需要原来该模块,常见的磁性物体包括:无刷电机外转子、金属螺丝刀、电子产品音响、大多数铁质金属物体,按照模块箭头指示朝正前方安装,gps指南针模块17的下端设置有系统总开关18,系统总开关18的右端设置有m4电机19,m4电机19的上端设置有m4电机电调20,m4电机电调20的上端设置有故障设置舱门锁21,故障设置舱门锁21的上端设置有m1电机电调22,m1电机电调22的右端设置有故障设置舱门23。
24.遥控器4包括触摸显示屏24,触摸显示屏24的左端和右端均设置有电源开关25,触摸显示屏24的上端设置有吊环26,吊环26的左端和右端分别设置有左摇杆27和右摇杆28,遥控器4前侧壁的上端设置有移动支架29,移动支架29的左端设置有开关a30,开关a30的右端设置有开关b31,移动支架29的右端设置有开关c32,开关c32的右端设置有开关d33,遥控器4上侧壁的左端设置有旋钮a34,遥控器4上侧壁的右端设置有旋钮b35,遥控器4后侧壁的上端固定设置有提手36,提手36下方的右端设置有第一按键37,第一按键37的左端设置有第二按键38,第一按键37和第二按键38的下端设置有电池后盖39,遥控器4的下侧壁设置有usb接口40,usb接口40的右端设置有ps/2接口41,遥控器4的详细参数为:通道:10通道;发射功率:<20dbm;频率范围:2.4055-2.475ghz;2.4g模式:增强型自动跳频数字系统;波段宽度:500khz;编码方式:gsfk;波段个数:140个;通道分辨率:4096级;天线类型:内置双天线;外形尺寸:179mm x 81mmx 161mm;显示屏:电容触摸屏;机身重量:410g;语言:中英文;
最低工作电压:4.2v;模拟器:usb模拟器;使用电池:2s电池;温度范围:-10℃—+60℃;认证ce,rcm,fccid:n4zflyskyi6s;湿度范围:20%-95%;
25.遥控器4的飞行模式切换:开关b为飞行模式切换开关,向上为gps姿态模式、中间为姿态模式、向下为手动模式;
26.充电:充电时请将遥控器后盖打开,取下电池按照图示连接方式充电,充电时cell1、cell2灯为红色,cell3灯为黄绿色,充满后三个灯均变为黄绿色;
27.对码:发射机和接收机在出厂前已对码成功,如需更换其他的发射机或接收机,请按照如下步骤进行对码:a、按住s-bus接收机背部的按钮,给接收机通电,接收机灯进入红色长闪;b、打开发射机电源,点击图标,进入【系统设置】然后选择【对码】,屏幕显示【对码中
……
】;c、接收机led灯由红色长闪变成红色慢闪,退出【对码】,接收机led灯变为红色常亮后,表示对码成功;
28.无人机解锁:遥控器两个摇杆向内侧下方掰杆保持,电机就会解锁启动;
29.切换摇杆模式:此遥控系统支持四种摇杆模式,点击【摇杆模式】进入菜单,根据需求在屏幕点击【模式1】、【模式2】、【模式3】、【模式4】。【模式1】即俗称“日本手”或“右手油门”、【模式2】即俗称“美国手”或“左手油门”,黑色框表示当前选定的模式,系统默认【模式2】,在菜单内选择您所需要的模式即可;
30.万用表安全操作备注:1.测量时请勿混合搭接多个焊点或排针,防止短路烧坏设备;2.测量时注意爱护表笔,不可多次缠绕转动,损坏表笔;3.长时间不使用或使用完毕后请关闭万用表,节省电量;
31.动力锂电池充电注意事项:a.请在阴凉通风处,室温0-30℃环境充电;b.充电时使用专业充电器;c.充电时远离易燃易爆品;d.请勿过充,不得高于4.25v;e.充电时需有人值守,备好灭火设施(防火毯、灭火器);f.远离潮湿的区域;充电锂电池电池使用注意事项:a.请勿短路,正负极相接;b.请勿过放,不得低于3.6v;c.电池发生碰撞,需要第一时间对电池隔离观察,请勿使用;d.请勿阻挡电池标识;e.请勿私自组装、拆组电池;f.搬运电池需要用防爆箱搬运;g.请勿拉扯电池电源线、平衡线;电池储存注意事项:a.电池储存时,请将电压调整到3.8v-3.85v(40%-50%);b.电池长期储存时请保持2周充放电激活一次;c.请在阴凉通风处,室温0-20℃环境储存;电池报废注意事项:a.严重鼓包的电池请勿使用;b.电池鼓包时请勿尝试戳破;c.严重变形的电池请勿使用;14d.漏液的电池请勿使用;e.压差过大的电池不用使用;f.报废的电池不能随意丢弃;g.进水电池要隔离观察;h.存放报废电池要远离易燃易爆品,必要时用消防设施隔离。
32.万用表6包括数字式表头42,数字式表头42的下端设置有转换开关43,转换开关43的左端设置有黑色表笔44,转换开关43的右端设置有红色表笔45。
33.动力锂电池46的参数为:容量:3300mah充电截止电压:12.6v;放电倍率:25c;持续放电:82.5a;电压:11.1v;成品尺寸(厚*宽*长mm):24.16*42.40*138.28;建议充电电流:6.6a(2c);最大充电电流:16.5a(5c);重量:296g。
34.线材盒物清单列表:
35.序号物品名称数量用途11pin杜邦线6信号线路故障时跳线排故使用23.5mm香蕉头硅胶线10电源线路故障时跳线排故使用
3电压报警器1测量电池电压4micro usb线1连接飞控或遥控器进行调参升级5故障设置舱门钥匙2打开故障设置舱6箱盖钥匙2打开系统箱体的锁7遥控器油门阻尼调节片1用于后期改装
36.电压显示使用方法:
37.a.将电压报警器插入电池平衡头,电压报警器显示“all”,接着显示的是电池的测量出的总电压。如:显示“12.6”,表示电池总电压是12.6v;
38.b.然后电压报警器会显示“no1”,提示下面要显示第一节电压,接着显示的是第一节电池的实际测量出的电压,比如显示“3.12”,则表示测量到的第一节电压是3.12v,接下来同上,显示“no2”及对应的电压、“no3”及对应的电压、表示是第2、3节电芯的电压;
39.c.以上是3s电池的显示过程,如果是8s电池则以此类推显示其他电芯电压。
40.电压报警设置方法:a.先将电压报警器插入电池平衡头;b.喇叭中间的是设定电压按钮,按一下则会显示数值,且数值是循环显示的,如:当电压报警器显示设定电压为3.6v,按一下按键,屏幕会显示3.7v,此时及修改为3.7v报警,以此类推。如果需要设定电压为3.2v报警时,就需要再按按键直到显示3.2v为止,显示相应的值后不用管它,它会自动保存用户当前设定值,过几秒后会恢复显示当前实时电压;c.电压报警器报警功能可关闭,显示off即是关闭;d.如果任意一片电芯低于设定值,电压报警器就会报警。
41.动力系统故障:
[0042][0043]
飞控系统故障:
[0044][0045]
电气系统故障:
[0046][0047]
链路故障:
[0048][0049]
如图7:控制模式(gps)中:(1)手动模式情况下,gps卫星数目《5时,亮三个红灯;gps卫星数目=5时,亮两个红灯;gps卫星数目=6时,亮一个红灯;gps卫星数目》6时,不闪灯;飞行姿态不佳时,亮红色条;(2)姿态模式下,gps卫星数目《5时,亮三个红灯和一个黄
灯;gps卫星数目=5时,亮两个红灯和第一黄灯;gps卫星数目=6时,亮一个红灯和一个黄灯;gps卫星数目》6时,亮一个黄灯;飞行姿态不佳时,亮红色条和一个黄灯;(3)gps姿态模式情况下,gps卫星数目《5时,亮三个红灯和第一绿灯;gps卫星数目=5时,亮两个红灯,一个绿灯;在gps卫星数目=6时,亮一个红灯和第一绿灯;gps卫星数目》6时,亮一个绿灯;在飞行姿态不佳时,亮一个红色条和一个绿灯;(4)智能方向控制情况下,gps卫星数目《5时,亮三个红灯,一个黄灯和一个绿灯;在gps卫星数目=5时,亮两个红灯、一个黄灯和一个绿灯;gps卫星数目=6时,亮第一红灯、一个黄灯和一个绿灯;gps卫星数目》6时,亮一个黄灯和一个绿灯;飞行姿态不佳时,亮一个红条、一个黄灯和一个绿灯;
[0050]
控制模式中:手动模式不闪灯,姿态模式闪黄灯;(注释:红色条提示飞行器姿态不佳,请悬停飞行器至提示消失,以获得更好的飞行体验,姿态模式黄灯和gps姿态模式绿灯表示的闪烁方向可为:(1)电机启动前,单闪:此时所有摇杆,除油门杆外回中;双闪:有摇杆,除油门杆外,不在中位;(2)电机启动后3秒内油门杆被推至10%以上后;单闪:此时所有摇杆回中;双闪:有摇杆不在中位。智能方向控制,绿灯和黄灯表示的闪烁方向可为:(1)电机启动前,一个黄灯和一个绿灯,此时所有摇杆回中;一个黄灯和两个绿灯,有摇杆不在中位;(2)电机启动后3秒内油门杆被推至10%以上后,一个黄灯一个绿灯,此时所有摇杆回中;一个黄灯两个绿灯:有摇杆不在中位)。
[0051]
如图8:指南针校准:开始水平校准,一个长黄灯;开始垂直校准,一个长绿灯;校准失败/系统其他错误,一排红灯;
[0052]
其他情况:tx信号丢失,一排黄灯;低电压/系统其他错误,一排红灯;和电脑正确连接,一个长绿灯;系统初始化和自检查,显示红绿黄红绿黄红绿黄绿绿绿绿。
[0053]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明;因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
[0054]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1