声音输出装置、通信控制器以及声音生成器的制作方法
1.本发明涉及对可听声进行声学输出的声音输出装置、通信控制器以及声音生成器。
背景技术:
2.一般而言,通过电动马达进行行驶的电动汽车、电动混合动力车与发动机汽车相比,低速行驶时的噪声极小。因此,作为这样的电动汽车、电动混合动力车,搭载有输出通知车辆的接近的声音(以下称为接近通报声音)的车辆接近通报装置的车辆已产品化(例如参照专利文献1)。
3.该车辆接近通报装置具有内置存储有将接近通报声音pcm数据化而得的接近通报声音数据的存储器的微型控制器(以下称为mcu)。mcu经由can(controller area network,控制器局域网)等通信网络,首先接收来自各种传感器的信息(车速、雨滴、轮胎气压等)。然后,该mcu根据这样的信息来从存储器读出接近通报声音数据而生成与该接近通报声音数据对应的接近通报声音波形信号。该接近通报声音波形信号经由lpf(low pass filter,低通滤波器)、放大器以及扬声器向车外声学输出。
4.像这样,在专利文献1中记载的车辆接近通报装置中,mcu进行can通信的接收控制以及接近通报声音波形信号的生成处理。
5.专利文献1:日本特开2014
‑
58237号公报。
6.然而,上述那样的接近通报声音是从车辆向周围的行人发出的声音,可以认为行人与该接近通报声音相关联地识别车辆的车种、车辆制造商。由此,根据车辆制造商、车种,为了提高自身的品牌价值而期望作为接近通报声音具有高音质。
7.然而,由于为了使接近通报声音高音质化,mcu的负荷会变大,由此需要采用能够进行高速处理的高价的mcu、采用分辨率较高的dac(digital
‑
analog converter,数模转换器)等对策,存在价格大幅度地增加这一问题。
技术实现要素:
8.由此,本发明的目的在于提供能够抑制mcu的负荷并输出相对较高音质的声音的声音输出装置、通信控制器以及声音生成器。
9.本发明所涉及的声音输出装置具有:通信控制器,接收包含移动体的移动速度的移动体相关信息,发送基于上述移动体相关信息的声音生成用的参数;以及声音生成部,包含取得具有规定声音波形的基本声音信号的电路,接收上述通信控制器发送的上述参数,并输出根据接收到的上述参数调整上述基本声音信号的声音波形而得到的声音信号。
10.本发明所涉及的通信控制器具有:取得部,连接于数据通信网络,经由上述数据通信网络取得表示移动体的移动速度的移动速度信息;以及输出部,根据在通过上述取得部取得到的上述移动速度信息表示的上述移动速度,生成用于生成通知上述移动体接近的接近通报声音的参数并将该参数输出。
11.本发明所涉及的声音生成器包含:声音合成电路,取得具有规定声音波形的基本声音信号;以及控制电路,接受与移动体的移动速度对应地生成的声音生成用的参数,控制上述声音合成电路以便对上述基本声音信号实施基于上述参数的调整,上述声音合成电路通过对上述基本声音信号实施基于上述参数的调整,从而生成通知上述移动体接近的接近通报声音信号并将该接近通报声音信号输出。
12.本发明通过进行包含移动体的移动速度的移动体相关信息的接收的通信控制器和包含进行声音生成的声音合成电路的声音生成部,来生成根据移动体相关信息而变化的声音。即,通信控制器根据接收到的移动体相关信息生成声音生成用的参数,并将该参数发送至声音生成部。声音生成部取得具有规定声音波形的基本声音信号,通过根据如上述那样接收到的参数调整该基本声音信号的波形,从而生成根据移动体相关信息而声音变化的声音信号。
13.像这样,在本发明中,使用能够生成较高音质的声音的声音合成电路来生成根据移动体相关信息而声音变化的声音信号。因此,与通过接收移动体相关信息的通信控制器的软件处理来生成上述的那样的声音信号的情况相比,能够抑制该通信控制器(mcu)的负荷并提供较高音质的声音信号。
附图说明
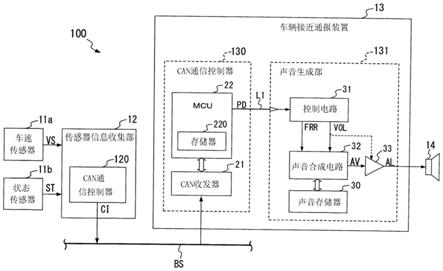
14.图1是示出包含本发明所涉及的声音输出装置的车辆接近通报系统的框图。
15.图2是示出存储于存储器220的查询表的一个例子的图。
16.图3是示出mcu22所执行的参数生成处理的一个例子的流程图。
17.图4是示出车辆接近通报装置13的其他的结构的框图。
18.图5是示出存储于存储器221的查询表的一个例子的图。
19.图6是示出mcu22a执行的参数生成处理的一个例子的流程图。
20.图7是示出存储器310的存储内容的一个例子的图。
21.图8是示出图4所示的车辆接近通报装置13的变形例的框图。
22.图9是示出存储于存储器310a的查询表的一个例子的图。
23.附图标记说明:
24.11a...车速传感器;12...传感器信息收集部;13...车辆接近通报装置;14...扬声器;22、22a、22b...mcu;31、31a、31b...控制电路;32...声音合成电路;33...放大器;100...车辆接近通报系统;130...can通信控制器;131...声音生成部。
具体实施方式
25.以下,参照附图对本发明的实施例详细地进行说明。
26.图1是示出从车辆侧输出将该车辆的接近通知行人等的声音(以下称为接近通报声音)的、包含作为本发明所涉及的声音输出装置的车辆接近通报装置13的车辆接近通报系统100的框图。另外,图1所示的车辆接近通报系统100在车辆以规定速度范围(例如5~20km/h)内的速度行驶的情况下将与该移动速度对应的音高以及音量的接近通报声音声学输出。
27.车辆接近通报系统100包含车辆接近通报装置13和车速传感器11a、状态传感器
11b、传感器信息收集部12以及扬声器14。
28.车速传感器11a检测搭载有该车辆接近通报系统100的车辆的移动速度,并将表示该移动速度的移动速度vs供给至传感器信息收集部12。状态传感器11b检测该车辆的状态(例如加速状态、轮胎的气压等)、车辆周围的环境的状态(例如车辆所接受的雨滴的量、周围环境音的大小等)等,并将分别单独地表示该状态的状态信息st供给至传感器信息收集部12。
29.传感器信息收集部12包含can(controller area network,控制器局域网)通信控制器120。传感器信息收集部12每隔规定期间获取移动速度vs以及状态信息st。can通信控制器120将包含获取到的移动速度vs以及状态信息st的传感器数据cd以符合can通信标准的格式经由作为数据通信网络的can总线bs发送至车辆接近通报装置13。
30.车辆接近通报装置13具有can通信控制器130以及声音生成部131。另外,can通信控制器130以及声音生成部131例如分别形成于2个半导体ic芯片。即,can通信控制器130形成于第1半导体ic芯片,作为声音生成器的声音生成部131形成于与第1半导体ic芯片分离的第2半导体ic芯片,这些第1半导体ic以及第2半导体ic芯片彼此通过布线l1电连接。
31.can通信控制器130包含can收发器21以及作为微型计算机的mcu22。
32.can收发器21连接于can总线bs,从该can总线bs接收传感器数据cd,并将该传感器数据cd供给至mcu22。
33.mcu22控制can收发器21以便从can总线bs中接收传感器数据cd。
34.并且,mcu22根据接收到的传感器数据cd,例如生成以下的那样的频率比以及音量作为用于在声音生成部131使接近通报声音生成的参数。即,mcu22根据传感器数据cd中包含的移动速度vs,求出接近通报声音相对于成为来源的基本接近通报声音的频率的频率比、和将接近通报声音声学输出时的音量。
35.另外,为了取得这些频率比以及音量,在mcu22搭载有存储器220,该存储器220存储有对上述的速度范围(例如5~20km/h)内的多个速度与频率比以及音量分别建立关联的查询表。
36.图2是示出该查询表的一个例子的图。
37.在图2所示的查询表中,对将最低速度设为5km/h、最高速度设为20km/h的5~20km/h的移动速度的范围以时速1km/h为单位划分为16个等级而得的各速度关联一对频率比z以及音量v。这里,在将速度变化1km/h时的频率的变化度例如设为0.8%的情况下,频率比z表示为:
38.z=(1+0.8/100)^x
39.x:自最低速度的速度变化量(km/h)
40.以下,对mcu22根据传感器数据cd的接收而执行的参数的生成处理进行说明。
41.图3是示出该参数生成处理的步骤的一个例子的流程图。
42.在图3中,首先,mcu22判定传感器数据cd中包含的移动速度vs是否表示5~20km/h的速度范围内的移动速度(步骤s11)。
43.在步骤s11中,在判定为移动速度vs表示5~20km/h的速度范围内的速度的情况下,mcu22从图2所示的查询表中取得与移动速度vs对应的频率比z(步骤s12)。
44.接下来,mcu22从图2所示的查询表中取得与移动速度vs对应的音量v(步骤s13)。
45.接下来,mcu22将这些取得到的频率比z以及音量v设为参数,并将其例如以串行方式的位(bit)串表示的参数信号pd经由布线l1发送至声音生成部131(步骤s14)。
46.在步骤s14结束、或者在上述步骤s11中判定为移动速度vs不表示5~20km/h的速度范围的速度的情况下,mcu22结束图3所示的参数生成处理,成为传感器数据cd的接收待机状态。
47.像这样,can通信控制器130具有:取得部(21、22),连接于作为数据通信网络的can总线bs,经由can总线bs取得表示车辆的移动速度的移动速度vs;以及输出部(22、220、s11~s14),根据取得到的移动速度vs,生成用于生成通知车辆接近的接近通报声音的参数并将其输出至声音生成部131。
48.声音生成部131包含以下进行说明的声音存储器30、控制电路31、声音合成电路32以及放大器33。
49.在声音存储器30存储有将成为车辆接近通报系统100所输出的接近通报声音的来源的基本接近通报声音进行pcm数据化而得的基本接近通报声音数据。
50.控制电路31在接受参数信号pd的情况下,从该接收到的参数信号pd中分别提取频率比z以及音量v。然后,控制电路31将表示这样的频率比z的频率比信号frr、以及表示音量v的音量信号vol供给至硬件结构的声音合成电路32。
51.声音合成电路32在接受频率比信号frr时,首先,从声音存储器30读出上述的基本接近通报声音数据并将其获取。接下来,声音合成电路32生成具有将由获取到的基本接近通报声音数据表示的声音波形的音高放大n倍(n是频率比信号frr示出的频率比的值)后的声音波形的接近通报声音信号。然后,声音合成电路32将信号作为接近通报声音信号av供给至放大器33,该信号是将这样的接近通报声音信号的振幅调整至与由音量信号vol表示的音量对应的大小的振幅而得到的。
52.放大器33向扬声器14供给将接近通报声音信号av功率放大而得到的信号作为接近通报声音信号al。
53.扬声器14例如设置于车辆的前保险杠,将基于接近通报声音信号al的可听声作为接近通报声音向车辆外部的空间声学输出。
54.如上述的那样,对于图1所示的车辆接近通报装置13而言,首先,can通信控制器130通过can通信接受传感器信息收集部12发送的移动速度vs。此时,can通信控制器130的mcu22从接收到的移动速度vs求出接近通报声音的相对于成为来源的基本接近通报声音的频率比以及音量。然后,该mcu22将这些频率比以及音量作为用于生成接近通信音的参数发送至声音生成部131。
55.在接收到作为该参数的频率比以及音量时,声音生成部131的声音合成电路32将基本接近通报声音的音高调整至接收到的频率比的值倍,并且将该调整后的信号的振幅调整至与接收到的音量对应的大小的振幅。由此,声音合成电路32生成具有与车辆的移动速度对应的音高以及音量的接近通报信号并将其输出。
56.像这样,在图1所示的结构中,由于can通信控制器130的mcu22不进行接近通报声音信号的生成处理,因此能够减轻该mcu22的负荷。
57.此时,接近通报声音的生成通过硬件结构的声音合成电路32进行,能够生成相对较高音质的声音。
58.另外,can通信控制器130并非将决定接近通报声音的音高以及音量的移动速度vs直接发送至声音生成部131,而是将与该移动速度vs对应的频率比z以及音量v作为参数发送至声音生成部131。因此,在声音生成部131中,能够通过控制电路31a接收到的频率比z以及音量v而保持原样地控制声音合成电路32。由此,控制电路31a不需要进行使用图2所示的那样的查询表而根据移动速度vs取得频率比z以及音量v的处理,因此能够相应地将结构简单化。
59.因此,根据图1所示的结构,能够减轻can通信控制器130的mcu22的负荷,并且提供较高音质的声音。
60.另外,在上述实施例中,can通信控制器130将与移动速度vs对应的频率比z以及音量v作为用于生成接近通信音的参数发送至声音生成部131。
61.然而,作为can通信控制器130,也可以不将频率比z以及音量v用于生成接近通信音的参数发送至声音生成部131,而将能够确定出这些频率比z以及音量v的相关信息作为用于生成接近通信音的参数发送至声音生成部131。
62.图4是示出鉴于这样的点而完成的车辆接近通报装置13的其他的结构的框图。另外,在图4所示的结构中,关于除代替mcu22而采用mcu22a,并代替控制电路31而采用控制电路31a的点以外的其他的结构与图1所示的结构相同。因此,以下,以mcu22a以及控制电路31a的动作为中心对图4所示的结构的动作进行说明。
63.mcu22a与mcu22相同地,控制can收发器21以便从can总线bs接收传感器数据cd。
64.另外,mcu22a具有存储有查询表的存储器221。mcu22a通过该查询表来取得存储有与接收到的传感器数据cd中包含的移动速度vs对应的频率比以及音量的地址。
65.图5是示出这样的查询表的一个例子的图。
66.另外,在图5所示的一个例子中,对将上述的5~20km/h的范围以时速1km/h为单位划分为16个等级而得的各移动速度与存储有和该移动速度对应的频率比的地址、以及存储有音量的地址分别建立关联并示出。
67.图6是示出mcu22a所执行的参数生成处理的步骤的流程图。
68.在图6中,首先,mcu22a判定传感器数据cd中包含的移动速度vs是否表示5~20km/h的速度范围的速度(步骤s21)。
69.在步骤s21中,在判定为表示该速度范围内的移动速度的情况下,mcu22a从图5所示的查询表中取得存储有与移动速度vs对应的频率比的地址作为第1地址(步骤s22)。
70.接下来,mcu22a从图5所示的查询表中取得存储有与移动速度vs对应的音量的地址作为第2地址(步骤s23)。
71.接下来,mcu22a将分别存储有取得到的频率比以及音量的第1地址以及第2地址设为声音生成用的参数,并将其例如以串行方式的位串表示的参数信号pd经由布线l1发送至声音生成部131(步骤s24)。
72.在步骤s24结束、或者在上述步骤s21中判定为移动速度vs不表示5~20km/h的速度范围内的速度的情况下,mcu22a结束图6所示的参数生成处理,成为传感器数据cd的接收待机状态。
73.声音生成部131中包含的控制电路31a具有存储有频率比以及音量的存储器310。
74.图7是示出存储器310中的频率比以及音量的存储方式的一个例子的图。
75.如图7所示,在存储器310中,图5所示的与各频率比z1~z16对应的地址[xx00]~[xx0f]保持原样地成为自身的地址[xx00]~[xx0f]。并且,图5所示的与各音量v1~v16对应的地址[yy00]~[yy0f]保持原样地成为存储器310的地址[yy00]~[yy0f]。
[0076]
另外,如图7所示,在存储器310的地址[xx00]~[xx0f]中,与图2所示的查询表相同地存储有与速度范围5~20km/h内的每1km/h的各速度对应的频率比z1~z16。并且,在存储器310的地址[yy00]~[yy0f]中,与图2所示的查询表相同地存储有与速度范围5~20km/h内的每1km/h的各速度对应的音量v1~v16。
[0077]
控制电路31a在接收到mcu22a发送的参数信号pd的情况下,从该接收到的参数信号pd中提取存储有频率比的第1地址以及存储有音量的第2地址。
[0078]
这里,控制电路31a从如图7所示存储于存储器310的频率比z1~z16以及音量v1~v16中读出与如上述的那样提取出的第1地址对应的1的频率比z和与第2地址对应的1的音量v。
[0079]
然后,控制电路31a将表示频率比z的频率比信号frr、以及表示音量v的音量信号vol分别供给至声音合成电路32。另外,关于声音合成电路32、放大器33以及声音存储器30的动作,由于如上述的那样与图1所示的例子相同,因此省略其说明。
[0080]
像这样,在图4所示的结构中,在声音生成部131设置存储器310,该存储器310在图5所示的地址分别存储有与将速度范围5~20km/h以1km/h为单位划分而得的各移动速度对应的频率比z1~z16以及音量v1~v16。由此,can通信控制器130的mcu22a不从图5所示的查询表取得与移动速度vs对应的频率比z以及音量v1,而是从图5所示的查询表取得存储有这些频率比z以及音量v1的存储器310的地址。然后,mcu22a将取得到的地址作为声音生成用的参数发送至声音生成部131。
[0081]
因此,根据图4所示的结构,在can通信控制器130的mcu22a中,由于未进行从移动速度vs取得频率比以及音量的处理,因此能够进一步减轻该mcu22a的负荷。
[0082]
另外,在图4所示的结构中,can通信控制器130将与移动速度vs对应的频率比z以及音量v各自的地址作为声音生成用的参数发送至声音生成部131。然而,作为can通信控制器130,也可以设为对通过车速传感器11a检测到的移动速度vs实施抑制伴随着时间经过的速度的变化率的处理后的产物作为声音生成用的参数发送至声音生成部131。
[0083]
图8是示出鉴于这样的点而完成的图4所示的车辆接近通报装置13的变形例的框图。另外,在图8所示的结构中,关于除代替mcu22a而采用mcu22b,并代替控制电路31a而采用控制电路31b的点以外的其他的结构与图4所示的结构相同。因此,以下,以mcu22b以及控制电路31b的动作为中心对图8所示的结构的动作进行说明。
[0084]
mcu22b与mcu22a相同地,控制can收发器21以便从can总线bs中接收传感器数据cd。
[0085]
并且,mcu22b例如计算移动速度的平均值作为使该传感器数据cd中包含的移动速度vs的变化缓和的平滑化处理。即,mcu22b例如按规定期间求出在该规定期间内取得到的移动速度vs的平均值(称为平均移动速度),并将其设为声音生成用的参数。然后,mcu22b将以串行方式的位串表示该参数的参数信号pd经由布线l1发送至声音生成部131。
[0086]
声音生成部131中包含的控制电路31b具有存储有以下所示的查询表的存储器310a。
[0087]
图9是示出存储于存储器310a的查询表的一个例子图。
[0088]
如图9所示,该查询表与存储于图1所示的存储器220的查询表相同地,对速度范围5~20km/h内的每1km/h的各移动速度与频率比z1~z16以及音量v1~vs16建立关联地示出。
[0089]
声音生成部131的控制电路31b在接收到mcu22b所发送的参数信号pd时,从该接收到的参数信号pd中提取平均移动速度。
[0090]
这里,控制电路31b从如图9所示存储于存储器310a的查询表中取得与平均移动速度对应的频率比以及音量。即,控制电路31b从存储器310a读出与以参数信号pd中包含的平均移动速度示出的移动速度对应的频率比z以及音量v。
[0091]
然后,控制电路31a将表示频率比z的频率比信号frr、以及表示音量v的音量信号vol分别供给至声音合成电路32。另外,关于声音合成电路32、放大器33以及声音存储器30的动作,由于与上述的图1所示的例子相同,因此省略其说明。
[0092]
像这样,在图8所示的结构中,在声音生成部131设置存储器310a,该存储器310a存储有与将速度范围5~20km/h以1km/h为单位划分而得的各移动速度对应的频率比z1~z16以及音量v1~v16。作为对移动速度vs使其变化的平滑化处理,can通信控制器130的mcu22b例如向声音生成部131发送平均化移动速度vs后的平均移动速度作为声音生成用的参数。
[0093]
根据图8所示的结构,需要在声音生成部131的控制电路31b中使用图9所示的查询表来从移动速度vs取得频率比以及音量的处理。然而,相应地,能够减轻can通信控制器130的mcu22b的负荷。
[0094]
另外,在上述实施例中,为了生成与移动速度vs对应的频率比以及音量,使用图2、图5、图7以及图9所示的那样的查询表,但也可以不使用它,而通过规定的函数而根据移动速度vs求出频率比以及音量。即,例如mcu22或者控制电路31b通过将移动速度vs设为变量的函数来计算与该移动速度vs对应的音量,并且通过将移动速度vs设为变量的函数(例如上述数式)来计算与该移动速度vs对应的频率比。
[0095]
另外,在上述实施例中,can通信控制器130的mcu22、22a或者22b根据车速传感器11a检测到的移动速度vs生成用于生成接近通报声音的参数(例如频率比z以及音量v)。
[0096]
然而,作为mcu,也可以设为不仅考虑该移动速度vs,还考虑状态传感器11b检测到的各种状态信息(例如车辆的加速度、轮胎的气压、车辆接受的雨滴的量、环境音的大小等)来求出参数。
[0097]
另外,在上述实施例中,将成为接近通报声音的来源的基本接近通报声音pcm数据化并储存于声音存储器30,声音合成电路32通过根据参数来调整该pcm数据化后的基本接近通报声音的波形从而生成接近通报声音信号av。
[0098]
然而,作为接近通报声音的生成方法,不限定于这样的方法。例如,也可以声音合成电路32生成规定周期的单一的正弦波作为基本接近通报声音并通过向其实施上述的调整(音高、音量)从而生成接近通报声音信号av。或者也可以生成具有相互不同的频率以及振幅的多个正弦波,并通过将各个正弦波以所希望的比例合成从而生成基本接近通报声音,并通过向其实施上述的调整(音高、音量)从而生成接近通报声音信号av。通过采用这样的接近通报声音的生成方法,从而不需要声音存储器30。
[0099]
另外,在上述实施例中,声音合成电路32根据音量信号vol调整接近通报声音的音
量,但也可以设为通过放大器33来进行基于音量信号vol的接近通报声音的音量调整。
[0100]
另外,在上述实施例中,can通信控制器130以及声音生成部131分别形成于不同的半导体ic芯片,但也可以在单一的半导体ic芯片上一起形成can通信控制器130以及声音生成部131。
[0101]
另外,在上述实施例中示出的车辆接近通报系统100以搭载于车辆为前提,但也可以搭载于车辆以外的例如包含无人机、气球、航空机等的飞翔体、或者船舶、列车、或者包含人的动物等移动体。此时,关于该移动体的移动速度也不限于通过传感器检测。即,can通信控制器130接收至少包含这样的移动体的移动速度的移动体相关信息即可。
[0102]
简而言之,作为以车辆接近通报装置13为一个例子的声音输出装置,在输出根据接收到的包含移动体的移动速度的移动体相关信息而声音(例如接近通报声音)变化的声音信号时,包含以下的通信控制器以及声音生成部即可。
[0103]
通信控制器(130)接收包含移动体的移动速度(vs)的移动体相关信息(vs),发送基于该移动体相关信息的声音生成用的参数(频率比、音量、地址、平均移动速度等)。声音生成部(131)包含生成具有规定声音波形的基本声音信号的电路(32),接收从通信控制器(130)发送的参数,输出根据接收到的参数调整基本声音信号的声音波形而得到的声音信号(av、al)。
[0104]
根据这样的结构,声音信号的生成由声音生成专用的声音合成电路负责,因此与通过基于通信控制器的软件处理来生成声音信号的情况相比,能够减轻通信控制器的负荷并且输出相对较高音质的声音信号。
[0105]
另外,在上述实施例中,作为表示车辆等移动体的移动速度的信息,使用通过车速传感器11a检测到的移动速度,但也可以不使用表示移动速度本身的信息,而使用能够推断移动速度的信息。例如,也可以取得油门开度、制动力等与移动体的移动速度相关的信息,使用以该信息为基础推断的移动速度。另外,也可以组合多个这些信息来生成表示车辆的移动速度的信息。
[0106]
另外,在上述实施例中,为了取得与某移动速度vs对应的频率比z以及音量v而使用图2、图5、图7以及图9所示的那样的查询表,但与1个移动速度对应的频率比以及音量不限于分别一个。也可以将与1个移动速度对应的多个频率比以及多个音量设为参数,通过根据该参数调整基本接近通报声音的波形从而生成接近通报声音信号av。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1