一种竹竿舞自动打拍机及其控制系统
1.本发明涉及健身娱乐设备技术领域,具体的说是一种竹竿舞自动打拍机及其控制系统。
背景技术:
2.竹竿舞是国内少数民族的特色活动,通常是有一组人按照不同的节奏和频率不断地摆动竹竿,使竹竿按照不同的节奏和频率不断地开合,另一组人也按照节奏和频率在不断开合的竹竿的空档中跳动。由此可知,跳竹竿舞时竹竿的动作需要多人来协调,操作者的劳动强度高。
3.目前,中国专利cn207871443u公开了一种气缸驱动的竹竿舞跳舞机,该机器跳舞竿能延导轨水平移动,跳舞竿与滑块推杆连接,滑块推杆与气缸的执行机构铰接,气缸由空气管向气缸提供压力空气产生动力;由储气罐出来的压缩空气通过稳压阀调节压力后,经过换向阀来连接到气缸的进气口;方向阀的动作由控制器控制,通过改变换向阀的动作改变进气方向,使气缸的往复运动,带动跳舞竿延导轨水平往复运动。气缸带动机器运转本身具有一定的危险性,在实际应用中,气压传动具有一定的局限性以及危险性,难以广泛推广使用。
4.中国专利cn108837458a,公开了一种竹竿舞自动打竿装置,包括平台、以及对称设置在平台上的左横梁、右横梁,还包括多个竹竿组、以及设置在左横梁上的第一传动机构和多个第一滑动机构,通过第一步进电机和第二步进电机驱动第一皮带和第二皮带运动,从而带动竹竿a和竹竿b相向或者相对运动,进而实现打竿动作。实际应用中,由于该设备是由plc控制的,plc处理数据位数有限,虽能精准控制机构的运动,但是其不具备智能能力,必须通过预先设定程序的方式进行操作,使用起来较为繁琐。机器采用步进电机进行调试,调试较不平滑,用户体验感较差。
5.中国专利cn107773962a,公开了一种全封闭式的自动竹竿舞装置,包括箱体,驱动机构,竹竿移动装置,复位装置。其中,箱体带有缺口;驱动机构、竹竿移动装置以及复位装置安装在箱体内。驱动机构包括电机、驱动盘、第一定滑轮、第二定滑轮、弹簧、钢丝绳。第一定滑轮固定在箱体内壁,钢丝绳一端卷绕驱动盘,绕过第二定滑轮与弹簧一端连接,弹簧该端焊接在第二滑套上,弹簧另一端连接在第一滑套上。第一滑套和第二滑套固定在滑轨上,滑轨固定在滑轨立柱之间,滑轨立柱固定在所述箱体下端部。实际应用中,该装置使用压缩弹簧,压缩弹簧损耗率较大,在使用时间较长之后会出现弹性模量下降,压缩形变难以复原地问题,需要较为经常地替换去,且机器不具有智能化,无法根据音乐自动打拍,使用的局限性较大。
技术实现要素:
6.本发明是为了解决上述现有技术存在的不足之处,提出一种竹竿舞自动打拍机及其控制系统,以期能根据源音乐文件,自动提取音乐节奏实现自动打拍的功能,从而能提高
竹竿舞打拍机的准确率。
7.本发明为达到上述发明目的,采用如下技术方案:
8.本发明一种竹竿舞自动打拍机,其特征是,对称设置有主体框架,每个主体框架的内侧顶部均设置有交流伺服电动机,所述交流伺服电动机通过平键与扭矩传递圆盘相连,所述扭矩传递圆盘的端面通过螺纹与扭矩传动连杆相连;所述扭矩传动连杆通过轴承与摇杆联动器的一端相连,且所述摇杆联动器滑动设置垂直滑槽上;所述垂直滑槽的两侧分别安装有光电传感器;所述摇杆联动器的另外两端分别滑键设置在第一左传动摇杆和第一右传动摇杆的凹槽内;所述第一左传动摇杆、第一右传动摇杆的顶端通过轴承分别与固定在主体框架上的第二左固定卷筒、第二右固定卷筒相连;所述第一左传动摇杆、第一右传动摇杆中间位置的凹槽内通过滑槽连接有第二左传动摇杆第二右传动摇杆;所述第二左传动摇杆、第二右传动摇杆的顶端通过轴承分别与固定在主体框架上的第一左固定卷筒、第一右固定卷筒相连;述第二左传动摇杆、第二右传动摇杆的下部凹槽内分别设置有左移动导杆与右移动导杆;所述左移动导杆与右移动导杆的一端分别通过左移动滑块与右移动滑块设置在自身主体框架的固定导轨、所述左移动导杆与右移动导杆的另一端通过另一左移动滑块与右移动滑块设置在对称的主体框架的固定导轨上;
9.所述交流伺服电动机驱动所述扭矩传递圆盘并带动所述扭矩传动连杆定轴转动,使得所述摇杆联动器带动滑键在第一左传动摇杆和第一右传动摇杆的凹槽内滑动,从而带动第一左传动摇杆和第一右传动摇杆分别绕着第二左固定卷筒、第二右固定卷筒转动,同时,所述第二左传动摇杆、第二右传动摇杆上的滑键分别在第一左传动摇杆和第一右传动摇杆的凹槽内滑动,并带动所述第二左传动摇杆、第二右传动摇杆分别绕着第一左固定卷筒、第一右固定卷筒转动,进一步带动处于所述第二左传动摇杆、第二右传动摇杆凹槽内的左移动导杆与右移动导杆驱动两端的移动滑块在固定导轨上滑动,从而将所述交流伺服电动机的输出扭矩转化为移动导杆开闭的往复运动。
10.本发明一种所述的竹竿舞自动打拍机的控制系统的特点在于,包括:数据预处理模块,数据处理模块,数据库模块,电机转速控制模块和检测报警模块:
11.所述数据预处理模块对所输入的音频进行小波变换,得到近似系数和细节系数并作为节拍数据后存储在所述数据库模块中;
12.所述数据处理模块将节拍数据输入深度学习网络中,得到电机转速后存储在所述数据库模块中;
13.所述电机转速控制模块中设置有不同节拍所对应的电机转速,并根据所述电机转速控制所述交流伺服电动机输出相应的扭矩,使得移动导杆按照音频所对应的节拍进行不同速度下闭合的往复运动;
14.所述检测报警模块利用两侧的光电传感器分别获取人脚与左移动导杆之间的距离、以及人脚与右移动导杆之间的距离,当距离小于所设定的阈值时,发出报警信号;当距离小于左移动导杆与右移动导杆之间距离的最小值时,发出中断信号;
15.所述电机转速控制模块根据所述报警信号减小所述交流伺服电动机输出的扭矩,或根据所述中断信号控制所述交流伺服电动机停机。
16.与已有技术相比,本发明的有益效果体现在:
17.1、本发明无需搬运人工进行手动操作,大大降低了人力成本及使用强度,机器能
够实现高程度的自动化,给使用者更加方便的使用体验,通过相应的附加模块,实现了人机交互。
18.2、本发明装置结构简单,造价低廉,安全可靠,通过光电传感器,能够对使用者进行相应的系统性保护。其操作方便、快捷,可由一人独立进行操控,可以不依赖于特殊的场地,完成使用者的健身目的。
19.3、本发明克服了传统的plc控制,使用了功耗更低,运算能力更强的stm-32处理器,只需要在pc端输入相应的音乐,就会自动将计算的相关分析波形传输到单片机控制终端。不用专人摆动竹竿,结构合理,体积较小,操作简单,自动化程度高,不受场地限制。
20.4、本发明分析了音乐信号频率与竹竿舞打拍机节拍的工作原理,分析了输入音乐节拍与输出打拍机频率之间的关系,运用深度学习框架pytorch,建立模型分析了节奏与舞蹈节拍之间的关系,进而研制出一种新型的竹竿舞自动打拍机,使得不需要人力,以及提前内置音乐程序,就可以完成根据音乐节奏的自动打拍,便于使用者的使用。
附图说明
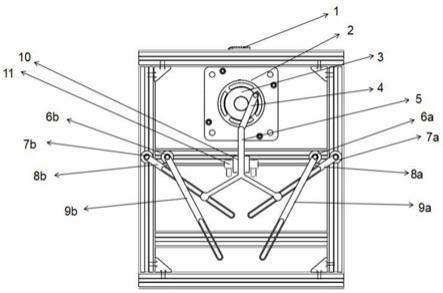
21.图1为本发明装置的正视示意图;
22.图2为本发明装置的整体布局示意图;
23.图3为本发明装置的多机联动示意图;
24.图4为本发明装置的竹竿完全开合示意图;
25.图5为本发明装置的竹竿完全闭合示意图;
26.图6为本发明控制系统可视化示意图;
27.图7为本发明系统的数据处理系统组成结构图;
28.图中标号:1 stm-32单片机控制终端模块、2交流伺服电动机、3扭矩传递圆盘、4扭矩传动连杆、5摇杆联动器、6a第一左固定卷筒、6b第一右固定卷筒、7a第二左固定卷筒、7b第二右固定卷筒、8a第一左传动摇杆、8b第一右传动摇杆、9a第二左传动摇杆、9b第二右传动摇杆、10垂直滑槽、11光电传感器、12a左移动滑块、12b右移动滑块、13a左移动导杆、13b右移动导杆、14固定导轨,15联动串行控制器。
具体实施方式
29.本实施例中,一种竹竿舞自动打拍机装置,如图1和图2所示,是对称设置有主体框架,每个主体框架的内侧顶部均设置有交流伺服电动机2,交流伺服电动机2通过平键与扭矩传递圆盘3相连,扭矩传递圆盘3的端面通过螺纹与扭矩传动连杆4相连;扭矩传动连杆4通过轴承与摇杆联动器5的一端相连,且摇杆联动器5滑动设置垂直滑槽11上;垂直滑槽11的两侧分别安装有光电传感器;摇杆联动器5的另外两端分别滑键设置在第一左传动摇杆8a和第一右传动摇杆8b的凹槽内;第一左传动摇杆8a、第一右传动摇杆8b的顶端通过轴承分别与固定在主体框架上的第二左固定卷筒7a、第二右固定卷筒7b相连;第一左传动摇杆8a、第一右传动摇杆8b中间位置的凹槽内通过滑槽连接有第二左传动摇杆9a第二右传动摇杆9b;第二左传动摇杆9a、第二右传动摇杆9b的顶端通过轴承分别与固定在主体框架上的第一左固定卷筒6a、第一右固定卷筒6b相连;述第二左传动摇杆9a、第二右传动摇杆9b的下部凹槽内分别设置有左移动导杆13a与右移动导杆13b;左移动导杆13a与右移动导杆13b的
一端分别通过左移动滑块12a与右移动滑块12b设置在自身主体框架的固定导轨14、左移动导杆13a与右移动导杆13b的另一端通过另一左移动滑块与右移动滑块设置在对称的主体框架的固定导轨上;
30.交流伺服电动机2驱动扭矩传递圆盘3并带动扭矩传动连杆4定轴转动,使得摇杆联动器5带动滑键在第一左传动摇杆8a和第一右传动摇杆8b的凹槽内滑动,从而带动第一左传动摇杆8a和第一右传动摇杆8b分别绕着第二左固定卷筒7a、第二右固定卷筒7b转动,同时,第二左传动摇杆9a、第二右传动摇杆9b上的滑键分别在第一左传动摇杆8a和第一右传动摇杆8b的凹槽内滑动,并带动第二左传动摇杆9a、第二右传动摇杆9b分别绕着第一左固定卷筒6a、第一右固定卷筒6b转动,进一步带动处于第二左传动摇杆9a、第二右传动摇杆9b凹槽内的左移动导杆13a与右移动导杆13b驱动两端的移动滑块在固定导轨上滑动,从而将交流伺服电动机2的输出扭矩转化为移动导杆开闭的往复运动。
31.本实施例中,如图3所示,当多台竹竿舞自动打拍机装置同时工作时,为了使多台设备能同时交互使用,引入联动串行控制器15同时对多台设备进行控制,减少了系统缓存的时间。如图4和图5所示,当扭矩传递圆盘3转动到最下方时,移动导杆13达到开合最大的位置。当扭矩传递圆盘3转动到最上方时,移动导杆达到闭合最大的位置,移动导杆13就在这个范围内移动。扭矩传递圆盘3具有良好的传力特征。其输出的扭矩可以通过摇杆联动器为水平导轨提供横向的驱动力,在横向驱动力的的驱动下,移动导杆13可以进行来回往动,横向驱动力的大小与速度受交流伺服电机输出转速与力矩的控制,通过扭矩位移转换系统的控制可以为移动导杆13提供最终的额定输出。扭矩圆盘3采用惯性较大的钢制圆盘,可以有效地利用惯性克服死点对传动系统的影响,增强系统传动的平稳性。
32.本实施例中,如图6所示,一种基于竹竿舞自动打拍机的控制系统,包括:数据预处理模块,数据处理模块,数据库模块,电机转速控制模块和检测报警模块:通过控制系统可以自动调节交流伺服电机的转速与输出扭矩,可以动态适应音乐播放的节拍,从而实现自动打拍的功能。
33.数据预处理模块对所输入的音频进行小波变换,得到近似系数和细节系数并作为节拍数据后存储在数据库模块中;具体实施中,在个人计算机端输入预处理音乐,编码为mp3格式,采样频率为44000hz,每个音乐节拍持续时间被保存在ascii文件中。对数据集中的信号做小波变换,每次变换产生近似系数和细节系数。近似系数是信号中的低频成分,而细节系数是信号中的高频成分,通过对继续对近似系数反复进行小波分解从而得到新的近似系数和细节系数。该系数分解后的结果将作为输入至深度学习模型的特征向量。提取特征信息之后,接下来需要计算计算全局的节拍。节拍指的是音乐的节拍,通常使用bpm衡量。如60bpm表示一分钟有60个节拍,每个拍子的周期为1s。变化的节拍检测采用分段处理的思想来检测。通过找出一个时间上的循环的周期,可以检测出具体的节拍。利用如式(1)所示的自函数的方法可以计算不同延迟时间下o(t)的自相关函数,值最高对应延迟时间就是一个beat的长度。引入一个权重系数p,使得周期结果偏向于某个经验值。
34.p(τ)=w(τ)t∑o(t)o(t-τ)
ꢀꢀ
(1)
35.式(1)中,τ表示延迟时间,w(τ)表示高斯权重系数,p(τ)表示权重系数,t表示时间变量,o(
·
)表示对应延时t时间的相关系数;
36.利用式(2)计算高斯权重系数w(τ):
37.w(τ)=e
(-0.5(στlog2τ/τ0)2)
ꢀꢀ
(2)
38.式(2)中,σ表示计算周期大小;
39.计算生成的5层小波近似系数和具体系数,可以作为特征向量的获取作为训练集的输入内容,通过已有音频数据集专业人员的节拍时间标注和计算获得的具体节拍,获得每个具体训练集的输出标签;
40.如图7所示,数据处理模块为搭载nvidia显卡处理芯片的计算机,在数据处理模块中装有利用大量数据训练的深度学习模型,该模型首先对特征向量进行归一化处理,通过已有测试集的数据,输入对应的节拍数据就能相应从数据库模块中提取对应的电机节拍转速数据,并将对应的电机节拍转速数据输出至数据库模块以及电机转速控制模块。
41.数据库模块中存储用于训练深度学习模型的音频数据,节拍数据和当前产生的实时数据,当前产生的实时数据包括当前输入音乐产生的音频数据,输入音乐对应参数的节拍数据,以及封装好的电机转速控制数据。
42.电机转速控制模块中设置有不同节拍所对应的电机转速,并根据所述电机转速控制所述交流伺服电动机输出相应的扭矩,使得移动导杆按照音频所对应的节拍进行不同速度下闭合的往复运动;
43.具体的说,传统竹竿舞音乐一般较为欢快,常用的节奏是四二拍、四三拍、四四拍。
44.12/4拍的节奏重点是:第一拍强,第二拍弱。节奏轻快的音乐基本上都是这个。
45.23/4拍的节奏重点是:强、弱、弱。节奏很明显。
46.34/4拍的节奏重点是:强、弱、次强,弱。一般曲调柔和、缓慢。
47.竹杆传动机构预设不同的转速,不同的节拍对应不同的转速特点,通过伺服电机的速度控制,实现了不同节拍下竹竿开闭合的不同速度,从而实现了基于节拍的连续运转。
48.检测报警模块利用两侧的光电传感器分别获取人脚与左移动导杆13a之间的距离、以及人脚与右移动导杆13b之间的距离,当距离小于所设定的阈值时,发出报警信号;当距离小于左移动导杆13a与右移动导杆13b之间距离的最小值时,发出中断信号;
49.电机转速控制模块根据报警信号减小交流伺服电动机输出的扭矩,或根据中断信号控制交流伺服电动机停机。
50.本实施例中,一种基于深度学习的竹竿舞智能打拍机的工作过程如下:
51.步骤一:首先通过个人计算机端输入竹竿舞音乐信息,深度学习模型将会对此音乐特征提取并分类,将采集处理到的数据通过数据传输模块传送给传输给数据处理模块。
52.步骤二:数据处理模块接收到对应曲目的音乐节拍之后,通过训练好的深度学习模型对获得的音乐节拍信息进行识别,并对不同类型的节拍信号进行抽样变换,将音乐节拍对应的连续时域信号转化为频域信号,即每时刻都能得到具体的频域节拍。
53.步骤三:传动模块通过已建立的深度学习系统,利用深度学习模型建立源文件与相应节拍对应的转速关系,通过预设的系统使不同节拍对应伺服动机的不同转速,即把连续的音乐信号转化成了打拍机传动系统不同的转速。
54.步骤四:数据处理模块在输入深度学习标注的结果数据之后,将标注后的数据传入数据库模块中储存,用进一步训练深度学习模型,以及在打拍机研究的应用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1