一种特种机器人专用照明装置的制作方法
1.本本实用新型涉及照明领域,尤其涉及是一种特种机器人专用照明装置。
背景技术:
2.特种机器人,应用于专业领域,一般由经过专门培训的人员操作或使用的,辅助或代替人执行任务的机器人。
3.现有技术中,传统的建筑特种机器人在照明的过程中,建筑房屋里面的灰尘较大,容易将建筑特种机器人的照明灯遮挡住,这样在夜晚照明时,达不到很好的照明效果;因此,针对上述问题提出一种特种机器人专用照明装置。
技术实现要素:
4.本实用新型的目的在于克服现有技术的不足,适应现实需要,提供一种能够对该特种机器人的照明灯进行除尘清理,避免照明灯被灰尘挡住达不到很好的照明效果的特种机器人专用照明装置。
5.为了实现本实用新型的目的,本实用新型所采用的技术方案为:
6.一种特种机器人专用照明装置,包括底座、控制室、控制单元、照明组件、除尘单元和移动组件;底座的顶端固接有控制室;控制室内设有控制单元;控制室的顶端设有照明组件;照明组件的顶端设有除尘单元;底座的底端设有移动组件;
7.所述除尘单元包括升降组件和清理组件;照明组件顶端的外侧设有升降组件;升降组件上设有清理组件。
8.升降组件包括固定杆、连接杆、第二电机、丝杆、内螺纹环、滑块、第一倒l形杆和环形槽;底座顶端的两侧均固接有固定杆;固定杆的顶端之间共同固接有连接杆;连接杆顶端的一侧设有第二电机;第二电机的输出端固接有丝杆,且丝杆的底端贯穿对应的连接杆并与其转动连接;丝杆通过螺纹丝杠螺母副连接有内螺纹环;内螺纹环靠近连接杆中部的一侧固接有滑块,且滑块的顶端开设有圆孔;圆孔侧壁的中部开设有环形槽;第二电机的两侧均固接有第一倒l形杆;第一倒l形杆呈竖直状的底端与连接杆固接。
9.清理组件包括第三电机、第二轴杆、第三轴承、第三轴杆、t形滑槽、t形滑杆、弹簧、圆形转盘、半圆套、刷毛和第二倒l形杆;连接杆顶端的中部设有第三电机;第三电机的输出端固接有第二轴杆;连接杆与第二轴杆连接的部分固接有第三轴承;第二轴杆的下方设有第三轴杆;第二轴杆底端的中部开设有t形滑槽;第三轴杆的顶端固接有t形滑杆;t形滑杆位于t形滑槽内并与其滑动连接;t形滑杆呈水平状一端底部的两侧均固接有弹簧,且弹簧的底端与对应t形滑槽的侧壁固接;第二轴杆的底端与第三轴杆的顶端紧密接触;第三轴杆的底端通过圆孔延伸至滑块的下方;第三轴杆底端对应环形槽的位置固接有圆形转盘,且圆形转盘与环形槽转动连接;第三轴杆的底端固接有半圆套;半圆套的内部固接有排布紧密的刷毛;第三电机的两侧均固接有第一倒l形杆;第一倒l形杆呈竖直状的底端与连接杆固接。
10.照明组件包括放置室、第一电机、第一轴杆、半圆头、照明灯、支撑环、支撑环槽和第一轴承;控制室的顶端固接有放置室;放置室内放置有第一电机;第一电机的输出端固接有第一轴杆;放置室的顶端与第一轴杆连接的部分固接有第一轴承;第一轴杆的顶端固接有半圆头;半圆头底端的两侧之间共同固接有支撑环;放置室的顶端对应支撑环的位置开设有支撑环槽;支撑环与支撑环槽转动连接;半圆头前侧的两端均安装有照明灯。
11.移动组件包括主动轮、从动轮、第二放置室、第四电机、第四轴杆和第四轴承;底座底端前侧的中部固接有主动轮;底座底端后侧的两端均固接有从动轮;底座底端对应主动轮的部分固接有第二放置室;第二放置室内放置有第四电机;第四电机的输出端固接有第四轴杆;第二放置室与第四轴杆连接的部分固接有第四轴承;第四轴杆远离第二放置室的一端与主动轮一端的中部固接。
12.控制单元与第一电机、照明灯、第二电机、第三电机和第二电机均电连接。
13.本本实用新型的有益之处在于:
14.1.本实用新型通过第三电机、第二轴杆、第三轴承、第三轴杆、t形滑槽、t形滑杆、弹簧、圆形转盘、半圆套和刷毛的结构设计,使得该装置能够对该特种机器人的照明灯进行除尘清理,避免照明灯被灰尘挡住达不到很好的照明效果;
15.2.本实用新型通过放置室、第一电机、第一轴杆、半圆头、照明灯、支撑环和支撑环槽的结构设计,控制第一电机带动第一轴杆转动,进而第一轴杆带动半圆头转动,此时半圆头会带动支撑环在支撑环槽内转动,实现了照明灯对不同方向进行照明。
附图说明
16.为了更清楚地说明本本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。
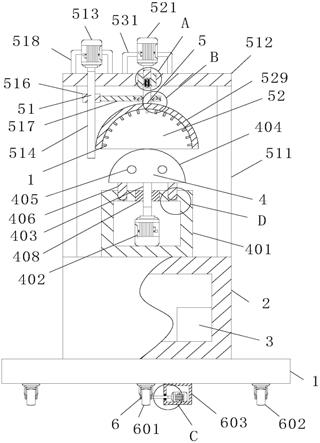
17.图1为本实用新型中的剖面结构示意图;
18.图2为图1中的a处局部放大示意图;
19.图3为图1中的b处局部放大示意图;
20.图4为图1中的c处局部放大示意图;
21.图5为图1中的d处局部放大示意图;
22.图6为本实用新型中的放置室的立体结构示意图。
23.图中:1、底座;2、控制室;3、控制单元;4、照明组件;401、放置室;402、第一电机;403、第一轴杆;404、半圆头;405、照明灯;406、支撑环;407、支撑环槽;408、第一轴承;5、除尘单元;51、升降组件;511、固定杆;512、连接杆;513、第二电机;514、丝杆;516、内螺纹环;517、滑块;518、第一倒l形杆;519、环形槽;52、清理组件;521、第三电机;522、第二轴杆;523、第三轴承;524、第三轴杆;525、t形滑槽;526、t形滑杆;527、弹簧;528、圆形转盘;529、半圆套;530、刷毛;531、第二倒l形杆;6、移动组件;601、主动轮;602、从动轮;603、第二放置室;604、第四电机;605、第四轴杆;606、第四轴承。
具体实施方式
24.下面结合附图和实施例对本实用新型进一步说明:
25.实施例1:一种特种机器人专用照明装置,参见图1至图6。
26.本设计其特种机器人专用照明装置包括底座1、控制室2、控制单元3、照明组件4、除尘单元5和移动组件6;底座1的顶端固接有控制室2;控制室2内设有控制单元3;控制室2的顶端设有照明组件4;照明组件4的顶端设有除尘单元5;底座1的底端设有移动组件6;
27.除尘单元5包括升降组件51和清理组件52;照明组件4顶端的外侧设有升降组件51;升降组件51上设有清理组件52,在使用时,操控控制单元3使得该机器人通过移动组件6进行移动,进一步的通过操控控制单元3使得照明组件4进行照明,并通过除尘单元5对照明组件4进行除尘,从而该装置能够对该特种机器人的照明灯405进行除尘清理,避免照明灯405被灰尘挡住达不到很好的照明效果。
28.进一步的,升降组件51包括固定杆511、连接杆512、第二电机513、丝杆514、内螺纹环516、滑块517、第一倒l形杆518和环形槽519;底座1顶端的两侧均固接有固定杆511;固定杆511的顶端之间共同固接有连接杆512;连接杆512顶端的一侧设有第二电机513;第二电机513的输出端固接有丝杆514,且丝杆514的底端贯穿对应的连接杆512并与其转动连接;丝杆514通过螺纹丝杠螺母副连接有内螺纹环516;内螺纹环516靠近连接杆512中部的一侧固接有滑块517,且滑块517的顶端开设有圆孔;圆孔侧壁的中部开设有环形槽519;第二电机513的两侧均固接有第一倒l形杆518;第一倒l形杆518呈竖直状的底端与连接杆512固接,在使用时,通过操控控制单元3使得第二电机513转动,第二电机513带动丝杆514转动,进而内螺纹环516相对丝杆514进行移动,滑块517随之移动。
29.进一步的,清理组件52包括第三电机521、第二轴杆522、第三轴承523、第三轴杆524、t形滑槽525、t形滑杆526、弹簧527、圆形转盘528、半圆套529、刷毛530和第二倒l形杆531;连接杆512顶端的中部设有第三电机521;第三电机521的输出端固接有第二轴杆522;连接杆512与第二轴杆522连接的部分固接有第三轴承523;第二轴杆522的下方设有第三轴杆524;第二轴杆522底端的中部开设有t形滑槽525;第三轴杆524的顶端固接有t形滑杆526;t形滑杆526位于t形滑槽525内并与其滑动连接;t形滑杆526呈水平状一端底部的两侧均固接有弹簧527,且弹簧527的底端与对应t形滑槽525的侧壁固接;第二轴杆522的底端与第三轴杆524的顶端紧密接触;第三轴杆524的底端通过圆孔延伸至滑块517的下方;第三轴杆524底端对应环形槽519的位置固接有圆形转盘528,且圆形转盘528与环形槽519转动连接;第三轴杆524的底端固接有半圆套529;半圆套529的内部固接有排布紧密的刷毛530;第三电机521的两侧均固接有第一倒l形杆518;第一倒l形杆518呈竖直状的底端与连接杆512固接,在使用时,当滑块517带动第三轴杆524向下移动时,第三轴杆524会带动t形滑杆526在t形滑槽525内滑动,进而t形滑杆526会对弹簧527压缩,当半圆套529完全覆盖在半圆头404上时,关闭第二电机513,控制第三电机521转动,第三电机521会以此带动第二轴杆522、t形滑杆526和第三轴杆524进行转动,进而第三轴杆524会带动半圆套529转动,此时半圆套529内部的刷毛530会对半圆头404外表面进行除尘清理,并将遮挡照明灯405部分的灰尘清理干净。
30.进一步的,照明组件4包括放置室401、第一电机402、第一轴杆403、半圆头404、照明灯405、支撑环406、支撑环槽407和第一轴承408;控制室2的顶端固接有放置室401;放置
室401内放置有第一电机402;第一电机402的输出端固接有第一轴杆403;放置室401的顶端与第一轴杆403连接的部分固接有第一轴承408;第一轴杆403的顶端固接有半圆头404;半圆头404底端的两侧之间共同固接有支撑环406;放置室401的顶端对应支撑环406的位置开设有支撑环槽407;支撑环406与支撑环槽407转动连接;半圆头404前侧的两端均安装有照明灯405,在使用时,控制第一电机402带动第一轴杆403转动,进而第一轴杆403带动半圆头404转动,此时半圆头404会带动支撑环406在支撑环槽407内转动,从而实现了照明灯405对不同方向进行照明。
31.进一步的,移动组件6包括主动轮601、从动轮602、第二放置室603、第四电机604、第四轴杆605和第四轴承606;底座1底端前侧的中部固接有主动轮601;底座1底端后侧的两端均固接有从动轮602;底座1底端对应主动轮601的部分固接有第二放置室603;第二放置室603内放置有第四电机604;第四电机604的输出端固接有第四轴杆605;第二放置室603与第四轴杆605连接的部分固接有第四轴承606;第四轴杆605远离第二放置室603的一端与主动轮601一端的中部固接;控制单元3与第一电机402、照明灯405、第二电机513、第三电机521和第四电机604均电连接,在使用时,控制第四电机604带动主动轮601转动,此时主动轮601会带动该装置进行移动。
32.在使用时,控制第四电机604带动主动轮601转动,此时主动轮601会带动该装置进行移动,从动轮602也会随之转动;进一步的控制第一电机402带动第一轴杆403转动,进而第一轴杆403带动半圆头404转动,此时半圆头404会带动支撑环406在支撑环槽407内转动,从而实现了照明灯405对不同方向进行照明;当照明灯405被灰尘遮挡时,通过操控控制单元3使得第二电机513转动,第二电机513带动丝杆514转动,进而内螺纹环516相对丝杆514进行移动,滑块517随之移动,当滑块517带动第三轴杆524向下移动时,第三轴杆524会带动t形滑杆526在t形滑槽525内滑动,进而t形滑杆526会对弹簧527压缩,当半圆套529完全覆盖在半圆头404上时,关闭第二电机513,控制第三电机521转动,第三电机521会以此带动第二轴杆522、t形滑杆526和第三轴杆524进行转动,进而第三轴杆524会带动半圆套529转动,此时半圆套529内部的刷毛530会对半圆头404外表面进行除尘清理,并将遮挡照明灯405部分的灰尘清理干净,从而该装置能够对该特种机器人的照明灯405进行除尘清理,避免照明灯405被灰尘挡住达不到很好的照明效果。
33.本实用新型的实施例公布的是较佳的实施例,但并不局限于此,本领域的普通技术人员,极易根据上述实施例,领会本实用新型的精神,并做出不同的引申和变化,但只要不脱离本实用新型的精神,都在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1