机械手锚链横档定位装置及工作方法与流程
1.本发明涉及锚链横档定位装置及工作方法,具体涉及一种机械手锚链横档定位装置及工作方法。
背景技术:
2.船用锚链是是连接船体与锚的钢质链条,其作用主要是连接锚与船,并向船体传递锚的抓驻力,被广泛应用于船舶停靠和海洋石油系泊工程。锚链质量的优劣与船舶停靠和海洋系泊工程的安全息息相关。完整的一套锚链生产过程为:下料—棒料加热—弯曲编环—闪光焊接—去除毛刺—压入横档。按链环的结构,锚链可分为有档锚链和无档锚链两种,前者的强度大于后者,有档锚链多见于海船和海洋工程,无档锚链则多用在小船上。压入横档这一工序仅适用于有档锚链,横档在外观上为哑铃形,在压档工序中,需要把常温状态下的横档横置在高温锚链环体中央,并使横档中心与压档胎具中心保持一致。目前在进行锚链压档这一环节时采用人工夹持的方式将横档送入锚链环体内,压档后横档位置的精确度完全取决于工人的技术水平,而且在制造大规格锚链时,所用的横档也更大更重,同时锚链环体的温度极高,人工横档定位往往很不准确,在这样的环境下,不仅工人劳动强度,作效率低下而且压档后横档位置很容易超差,使横档中心偏离压档胎具中心,从而造成偏档、松档,影响产品的外观和质量,严重时还会造成链环损毁,大大增加了生产成本。
3.中国专利cn203356964u的专利公开了一种横档输送辅助定位装置,该装置依靠l形定位块定位横档,通过调节托板调整横档的纵向位置,通过专用锚链起重设备调节悬吊的锚链环体上下位置,使压档胎具内的锚链环的横向中心线尽量靠近压档胎具水平中心线,通过人工推动托板使车架沿着两条轨道移动。该发明并没有完全摆脱人工调整的方式进行压档,无法从根本上解决问题。
技术实现要素:
4.发明目的:本发明的一个目的是提供一种机械手锚链横档定位装置,解决现有定位装置需要人工辅助、效率低的问题。
5.本发明的另一目的是提供机械手锚链横档定位装置的工作方法,解决完全摆脱人工调整,机械手定位不准确,机械手训练深度强化学习需要大量训练样本、奖励函数难以设计训练时间长的问题。
6.技术方案:本发明所述的机械手锚链横档定位装置,包括横档平铺装置、送料装置、辅助定位装置和控制装置,所述横档平铺装置包括下料传送带和限高传感器直线模组,所述下料传送带两侧分别设置有丝杆机组,所述丝杆机组包括上侧丝杆装置和下侧丝杆装置,所述上侧丝杆装置包括丝杆和直线丝杆滑台,所述丝杆穿过直线丝杆滑台后通过伺服换向器和联轴器与丝杆电机连接,所述直线丝杆滑台上设置有可沿直线丝杆滑台滑动的丝杆升降机安装滑块,所述电机驱动丝杆转动,丝杆转动带动丝杆升降机安装滑块沿直线丝杆滑台滑动,所述丝杆升降机安装滑块连接丝杆升降机,所述丝杆升降机包括升降机丝杆,
所述升降机丝杆一端与下侧丝杆装置的丝杆升降机滑块可转动连接,另一端穿过平铺刮板后通过伺服转换器和联轴器与丝杆升降机电机连接,所述丝杆升降机电机驱动升降机丝杆转动,升降机丝杆转动带动平铺刮板上下移动,所述限高传感器直线模组设置在下料传送带一侧,所述限高传感器直线模组包括限高直线丝杆滑台和限高传感器,所述限高传感器可沿限高直线丝杆滑台滑动,所述送料装置设置在下料传送带末端,所述辅助定位装置包括机械手和相机,所述相机设置在机械手上,所述控制装置与丝杆电机、丝杆升降机电机、送料装置和限高传感器直线模组信号连接。
7.方便固定各装置,所述横档平铺装置还包括丝杆机组安装架、侧边防护板、末端防护板和丝杆传动机构安装板,所述丝杆机组安装架通过螺钉安装在下料传送带两侧,侧边防护板)通过螺钉安装在丝杆机组安装架内侧,末端防护板和丝杆传动机构安装板通过螺钉安装在丝杆安装架末端。
8.所述述丝杆机组通过螺钉安装在丝杆机组安装架上上,所述限高传感器直线模组通过螺钉安装在侧边防护板的内壁,所述侧边防护板上设置有透光槽。
9.所述升降机丝杆一端与下侧丝杆装置的丝杆升降机滑块通过轴承连接。
10.所述限高直线丝杆滑台上设置有沿限高直线丝杆滑台滑动的限高传感器固定滑块,所述限高传感器穿过限高传感器固定滑块上的安装孔,并通过两个螺母夹紧固定在限高传感器固定滑块上。
11.为了将锚链横档传送至机械手抓取工位,所述送料装置包括送料传送带和机械手指示传感器组成,机械手指示传感器穿过送料传送带的安装孔通过两个螺母夹紧固定在送料传送带的外壁上,所述机械手指示传感器与控制装置信号连接,所述控制装置接收机械手指示传感器的信号并根据信号控制送料传送带动作。
12.本发明所述的机械手锚链横档定位装置的工作方法,包括以下步骤:
13.(1)在控制装置内初始化分类器和初始化控制强化策略;
14.(2)将横档成功定位于锚链环中央的图像作为目标示例输入到控制装置内,控制装置根据初始化的控制强化策略控制机械手夹取横档放置于锚链环体中央,机械手上的工业相机拍摄图像上传至控制装置,分类器根据目标示例与通过强化策略收集到的图像样本的差异持续调整分类器和更新控制强化策略,直至分类器无法区分目标示例与通过强化策略收集到的图像样本,即完成机械手的训练;
15.(4)在控制装置中预设锚链横档平铺高度,控制丝杆机组(16)的丝杆转动,将丝杆升降机(17)移动到横档平铺装置(1)的最前端,同时控制装置(3)控制升降机丝杆转动使得平铺刮板(175)移动到最上端,控制装置(3)控制限高传感器直线模组(18)的丝杆转动,使限高传感器(182)的检测激光的高度高于锚链环横档(19)的平铺高度;
16.(5)下料传送带(11)将带动锚链环横档(19)向向下料传送带(11)前部移动,若锚链横档堆叠,堆叠的锚链环横档触发限高传感器(182)的检测激光,控制装置(3)接收到限高传感器信号,控制下料传送带(11)停止运动,控制装置通过控制平铺刮板的往复的上下移动和前后移动,将堆叠的锚链横档全部被铺平在下料传送带(11)上;
17.(6)通过下料传送带(11)送往送料传送带(21)上,锚链横档19传送到送料传送带(21)的前端,触发到机械手指示传感器(22)的检测激光时,控制装置(3)控制送料传送带(21)停止转动,并控制机械手(41)进行抓取,经过训练的机械手(41)将通过工业相机(42)
摄取图像并进行放置作业,将锚链横档(19)准确放置在锚链环(5)的中央。
18.其中,所述步骤(1)中采用感知机作为分类器,初始强化算法为q
‑
learning。
19.有益效果:本发明自动化程度高,容易操作,可靠性高,本发明的训练方法以分类器作为奖励,只需向机器人提供正面示例而无需反面示例,避免了奖励函数的设计和大量的正反面训练样本,大大节省了机械手训练时间,训练完成的机械手将不仅能够准确进行横档放置作业,更可以在各种工况下实现准确放置,有效提高了横档放置的成功率。
附图说明
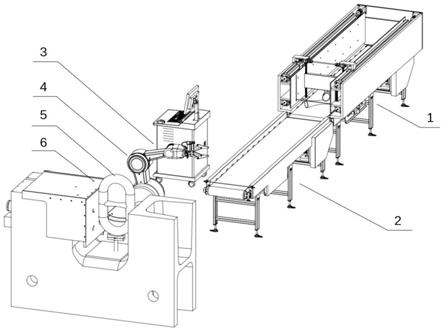
20.图1为本发明的整体结构示意图;
21.图2为横档平铺装置结构示意图;
22.图3为送料装置结构示意图;
23.图4为丝杆机组结构示意图;
24.图5为限高传感器直线模组结构示意图;
25.图6为丝杆升降机结构示意图;
26.图7为辅助定位装置示意图;
27.图8为机械手训练方法流程图。
具体实施方式
28.下面结合附图对本发明进行进一步说明。
29.如图1
‑
7所示,本发明公开了一种机械手锚链横档定位装置,包括横档平铺装置1、送料装置2、控制装置3和辅助定位装置4,压档机构6夹持锚链环5,横档平铺装置1包括下料传送带11、丝杆机组安装架12、侧边防护板13、末端防护板14、丝杆传动机构安装板15、丝杆机组16、丝杆升降机组17、限高传感器直线模组18以及锚链环横档19。丝杆机组安装架12通过螺钉安装在下料传送带两侧,侧边防护板13通过螺钉安装在丝杆机组安装架12内侧,末端防护板14和丝杆传动机构安装15板通过螺钉安装在丝杆安装架12末端,末端防护板14和丝杆传动机构安装架15之间架空,留有一定的间隙,丝杆机组16通过螺钉安装在丝杆机组安装架上12,丝杆机组16包括上侧左端直线丝杆滑台161、上侧左端丝杆升降机安装滑块162、轴承163、下侧左端直线丝杆滑台164、下侧左端丝杆升降机安装滑块165、上侧右端直线丝杆滑台166、下侧右端丝杆升降机安装滑块167、上侧右端直线丝杆滑台168、上侧右端丝杆升降机安装滑块169、联轴器1610、伺服换向器1611和丝杆电机1612。上侧左端丝杆升降机安装滑块162穿过上侧左端直线丝杆滑台161的丝杆并且通过上侧左端直线丝杆滑台161的导向块固定,下侧左端丝杆升降机安装滑块165穿过下侧左端直线丝杆滑台164的丝杆并通过下侧左端直线丝杆滑台164的导向块固定,下侧右端丝杆升降机安装滑块167穿过上侧右端直线丝杆滑台166的丝杆并且通过上侧右端直线丝杆滑台166的导向块固定,上侧右端丝杆升降机安装滑块169穿过上侧右端直线丝杆滑台168的丝杆并且通过上侧右端直线丝杆滑台168的导向块固定,四个丝杆升降机安装滑块能够通过直线丝杆滑台的丝杆转动进行移动,轴承163通过安装槽安装在下侧左端丝杆升降机安装滑块165和下侧右端丝杆升降机安装滑块167上,四组直线丝杆滑台的丝杆通过联轴器1610以及伺服换向器1611与丝杆电机1612相连,四组直线滑台机构由此实现同步传动,伺服换向1611和丝杆电机1612
均通过螺钉安装在丝杆传动机构安装板15上。丝杆升降机组17通过螺钉固定在丝杆机组16的上侧左端丝杆升降机安装滑块162和上侧右端丝杆升降机安装滑块169上,丝杆升降机组17包括丝杆升降机171,丝杆升降机171包括丝杆升降机电机172、联轴器、伺服换向器和平铺刮板组成175,丝杆升降机电机172通过联轴器和伺服换向器相连,丝杆升降机电机172和伺服换向器均通过螺钉固定在上侧左端丝杆升降机安装滑块162上,丝杆升降机171的丝杆穿过平铺刮板175的螺纹孔,平铺刮板175能够通过丝杆升降机171的丝杆转动而进行上下移动。限高传感器直线模组18通过螺钉安装在侧边防护板13的内壁,限高传感器直线模组18包括限高直线丝杆滑台181、限高传感器固定滑块182和限高传感器183,限高传感器固定滑块182穿过限高直线丝杆滑台181的丝杆并且能够随着限高直线丝杆滑台181的丝杆转动而移动,限高传感器183穿过限高传感器固定滑块182上的安装孔,并通过两个螺母夹紧固定在限高传感器固定滑块182上,限高传感器183发出的检测激光能够从侧边防护板13上的透光槽131穿过。送料装置2包括送料传送带21和机械手指示传感器22,机械手指示传感器22穿过送料传送带21的安装孔通过两个螺母夹紧固定在送料传送带21的外壁上。辅助定位装置4包括机械手41和工业相机42,工业相机42通过螺钉安装在机械手41的手部末端。
30.在使用本发明时,首先要对机械手进行训练,训练过程如图8所示,训练方法如下:
31.(1)将不同规格的锚链横档平铺在横档平铺装置1的下料传送带11上,用作机械手的抓取训练;
32.(2)在控制装置内初始化分类器和初始化控制强化策略,采用感知机作为分类器,并且以分类器分类成功的概率作为训练强化学习智能体来实现该目标的奖励,初始强化算法为q
‑
learning;
33.(3)将横档成功定位于锚链环中央的图像作为目标示例输入到控制装置内,控制装置根据初始化的控制强化策略控制机械手夹取横档放置于锚链环体中央,机械手上的工业相机拍摄图像上传至控制装置,分类器根据目标示例与通过强化策略收集到的图像样本的差异持续调整分类器和更新控制强化策略,直至分类器无法区分目标示例与通过强化策略收集到的图像样本,即完成机械手的训练,机械手将使用当前最新的强化策略进行横档放置工作;
34.在上述过程中,辅助定位装置4将通过工业相机42随机拍摄一些机械手41放置作业完成后的图像,并且将张这些图像上传至控制装置3中,由用户进行查看,并由用户判断这些图像所展示的放置作业是否成功。
35.机械手训练完成本发明开始工作,工作的具体过程如下:
36.(1)将乱序的锚链环横档19倒入横档平铺装置1的下料传送带11上,作业人员需要在控制装置3中输入锚链横档19的平铺尺寸,即单根横档平铺在底面时的高度,本例中锚链横档19的平铺高度为10厘米;
37.(2)控制装置3将控制丝杆机组16的丝杆转动,将丝杆升降机组17移动到横档平铺装置1的最前端,同时控制装置3将控制丝杆升降机17的丝杆转动使得平铺刮板175移动到最上端。然后控制装置3将控制限高传感器直线模组18的丝杆转动,使限高传感器182的检测激光的高度略高于锚链环横档19的平铺高度,本例中限高传感器182的检测激光的高度为11cm;
38.(3)下料传送带11将带动锚链环横档19向下料传送带11前部移动,若锚链环横档
19出现堆叠现象,当锚链环横档19移动到下料传送带11前端时,堆叠的锚链环横档19将触发限高传感器182的检测激光,此时控制装置3得到信号,将控制下料传送带11停止运动,然后控制丝杆机组16的丝杆电机1612转动,使丝杆升降机组17从下料传送带11的最前端向下料传送带11的末端移动一段距离,在本例中丝杆机组16将带动丝杆升降机17移动2.5米,然后控制装置3将控制丝杆机组16的丝杆电机1612转动,使丝杆升降机组17移动回到下料传送带11的最前端。然后控制装置3将控制丝杆升降机组17的丝杆升降机电机172转动,使得平铺刮板175下降一定的距离,下降的距离通过下式计算:
39.h=[s/2]
[0040]
上式中,h为平铺刮板175下降的距离,s为平铺刮板175距离限高传感器183检测激光的距离,在本例中,平铺刮板175距离限高传感器183检测激光的距离s=19cm,则h=[s/2]=[19/2]=9cm。
[0041]
(4)控制装置3控制丝杆升降机组17的丝杆升降机电机172转动,使得平铺刮板175下降9cm后,控制装置3将控制丝杆机组16的丝杆电机1612转动,使丝杆升降机组17从下料传送带11的最前端向下料传送带11的末端移动2.5米,然后控制装置3将控制丝杆机组16的丝杆电机1612转动,使丝杆升降机组17移动回到下料传送带11的最前端。随后,控制装置3将再次控制丝杆升降机组17的丝杆升降机电机172转动,使得平铺刮板175下降9cm,并控制丝杆机组16的丝杆电机1612转动,使丝杆升降机组17从下料传送带11的最前端再次向下料传送带11的末端移动2.5米,然后控制装置3将控制丝杆机组16的丝杆电机1612转动,使丝杆升降机组17移动回到下料传送带11的最前端,最后控制装置3将控制丝杆升降机组17的丝杆升降机电机172转动,使得平铺刮板175上升回到最高位,即平铺刮板175距离限高传感器183检测激光的19cm处;
[0042]
(5)来回的平铺运动后,堆叠在一起的锚链环横档19将全部被铺平在下料传送带11上,此时控制装置3将控制下料传送带11继续转动,此时锚链横档19将不会触发限高传感器183的检测激光,可以通过下料传送带11送往送料传送带21,当锚链环横档19通过送料传送带21移动到送料传送带21的前端,触发到机械手指示传感器22的检测激光时,控制装置3将控制送料传送带21停止转动,并控制机械手41进行作业,经过训练的机械手41将通过工业相机42摄取图像,从图像中获取锚链横档19的位置信息,并进行高精度的放置作业,使锚链横档19能够准确放置在锚链环5的中央。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1