MEMS探针激光刻蚀装置用光学准焦结构的制作方法
mems探针激光刻蚀装置用光学准焦结构
技术领域
1.本发明mems探针激光刻蚀装置用光学准焦结构属于半导体加工测试技术领域。
背景技术:
2.探针卡是用于对裸芯进行测试的测试接口,通过将探针卡上的探针与ic芯片上的焊垫或凸块直接接触,引出ic芯片讯号,再配合测试仪器向ic芯片写入测试信号,进而实现ic芯片封装前的测试。
3.探针卡的核心结构之一就是探针。目前,制作探针应用最多的有自下而上和自上而下两种方式。
4.自下而上的电镀方式:
5.cn201010000429.2,一种微探针结构及其制造方法,利用半导体制程的微影、电镀、平坦化、蚀刻技术,并以高分子来取代电镀第二牺牲层金属,于一具有空间转换的基板表面上,相继形成具有二层以上的微金属结构,藉以得到具有该二层以上的微金属结构的微探针结构,在此,每一层微金属结构是由一种材料所组成,而该二层以上的微金属结构可由相同材料及/或由不同的材料所组成。利用上述微探针结构制造方法所做出的微探针结构,具有强化悬臂梁的结构设计,适用于各类电子组件测试用的组件,可用以做为探针卡的测试头,而有效增加测试频宽、缩小间距及提升并排测试能力。
6.cn201210221177.5,一种电连接器用探针的电镀工艺,包括以下加工步骤:步骤a、对探针进行前处理,去除油污;步骤b、对探针进行活化处理,活化探针表面氧化膜;步骤c、在探针表面镀上一层铜膜镀层;步骤d、在铜膜镀层表面镀上一层金膜镀层;步骤e、在金膜镀层表面镀上一层钌膜镀层;步骤f、在钌膜镀层表面进行后处理,进行表面封孔、水洗、烘干。该电镀工艺具有原料成本低,加工难度低,生产成本低且能满足电连接器产品外观质量的高要求。
7.cn201710402364.6,一种可提高高压直流换流阀均压电极探针表面光洁度的电镀工艺,将预处理后的均压电极探针放入到电镀液中进行镀铂处理,电镀液成分为:四氯铂酸钠或氯铂酸钠、乙二胺四乙酸二钠或乙二胺四乙酸四钠;将均压电极探针作为工作电极,采用环状铂片作为对电极,将均压电极探针放置在环状铂片的正中间;在合适的电镀液温度,电镀液ph值和电镀电流下,使均压电极探针表面的镀层到固定厚度。该电镀工艺简单易控,利用电镀液中的螯合剂,限制铂离子的活度及其在镀液中的扩散系数,从而控制铂的还原反应速度,进而控制铂沉积层的表面光洁度达到镜面。
8.由于自下而上的电镀工艺采用大量化学原料,会产生环保问题,更重要的是,电镀精度不好把控,微米级甚至是亚微米级的探针制作难度极高。
9.自上而下的加工方式:
10.首先将待加工探针带材键合至晶元表面,然后采用光刻工艺制备光刻胶掩模,继而采用干法或湿法工艺进行刻蚀,可以实现小尺寸高精度探针的制作。然而,此种工艺为了实现更小尺寸的探针制备,并保证较高的刻蚀精度,所使用的工艺设备成本会成指数形式
上涨,因此,小尺寸高精度探针的制作成本极高。
11.针对以上问题,又出现了一种基于激光刻蚀方法的探针制备工艺,这种制备工艺能够有效解决自下而上的电镀方式所存在的环保问题,以及自上而下光刻方式所存在的成本高问题。
12.随着探针尺度越来越小,要求激光刻蚀精度越来越高,同时,随着专用探针卡需求的不断涌现,相应探针的结构也变得愈加复杂,相应的激光烧蚀图形也变得非规则化,这些都给刻蚀带来越来越多的挑战,为了适应这种变化,急需一种精度高、间距能够连续调节的激光刻蚀装置,然而,通过对现有资料和仪器设备的了解,还没有发现一款能够实现上述功能的通用激光刻蚀设备、方法及关键技术。
技术实现要素:
13.针对上述问题,本发明公开了一种mems探针激光刻蚀装置用光学准焦结构,将其用在本发明所公开的mems探针激光刻蚀装置与方法中,不仅刻蚀精度更高,而且刻蚀间距能够连续调节。
14.本发明的目的是这样实现的:
15.一种mems探针激光刻蚀装置,按照光线传播方向,依次设置弧形光源,螺旋通槽板,直线通槽板,物镜,单晶硅圆片和四维台;
16.所述弧形光源的每一点到物镜中心距离相同,即弧形光源的形状为以物镜中心为圆心的圆弧形;弧形光源每一点的切线均与该点到物镜中心的连线垂直;
17.所述螺旋通槽板包括开有螺旋通槽的第一底板和截面为圆环形的第一侧边,所述侧边的外表面设置有齿,形成齿轮结构,所述螺旋通槽的螺旋线满足如下关系:
18.l(α)=l
0-kα
19.其中,l0为螺旋线距离第一底板圆心的最大距离,在螺旋通槽与直线通槽交点到第一底板圆心的距离为所述最大距离时,定义第一底板所处位置为初始位置;k为系数,具有长度/弧度的量纲,α为弧度,l(α)表示螺旋线从初始位置转动α后,螺旋通槽与直线通槽交点到第一底板圆心的距离;
20.所述直线通槽板包括开有直线通槽的第二底板和截面为圆环形的第二侧边,所述第二侧边的内圆直径大于第一侧边的外圆直径,所述第二底板上表面与第一底板下表面紧贴;
21.所述单晶硅圆片上表面与第二底板分别位于物镜的像面和物面,单晶硅圆片能够在四维台的承载下完成四维运动;
22.所述四维台能够完成三维平动和一维转动,所述转动在弧形光源与光轴所确定的平面内进行。
23.上述一种mems探针激光刻蚀装置,所述第二底板的直线通槽周围设置有刮板,第二底板上表面设置有多个与第二底板同心的环形槽,所述环形槽起止于直线通槽周围的刮板;第二底板上表面还设置有半径方向的直线槽,所述环形槽与直线槽交叉连通,环形槽与直线槽内灌有润滑油,所述润滑油从第一侧边与第二侧边之间滴入。
24.上述一种mems探针激光刻蚀装置,所述第一侧边外部啮合有齿轮,所述齿轮由电机控制旋转,所述电机连接控制器,所述控制器连接四维台。
25.上述一种mems探针激光刻蚀装置,所述第一侧边与齿轮之间为变速器结构。
26.面向mems探针激光刻蚀装置的针孔结构,包括螺旋通槽板和直线通槽板;
27.所述螺旋通槽板包括开有螺旋通槽的第一底板和截面为圆环形的第一侧边,所述侧边的外表面设置有齿,形成齿轮结构,所述螺旋通槽的螺旋线满足如下关系:
28.l(α)=l
0-kα
29.其中,l0为螺旋线距离第一底板圆心的最大距离,在螺旋通槽与直线通槽交点到第一底板圆心的距离为所述最大距离时,定义第一底板所处位置为初始位置;k为系数,具有长度/弧度的量纲,α为弧度,l(α)表示螺旋线从初始位置转动α后,螺旋通槽与直线通槽交点到第一底板圆心的距离;
30.所述直线通槽板包括开有直线通槽的第二底板和截面为圆环形的第二侧边,所述第二侧边的内圆直径大于第一侧边的外圆直径,所述第二底板上表面与第一底板下表面紧贴;
31.所述单晶硅圆片上表面与第二底板分别位于物镜的像面和物面,单晶硅圆片能够在四维台的承载下完成四维运动;
32.所述四维台能够完成三维平动和一维转动,所述转动在弧形光源与光轴所确定的平面内进行。
33.一种mems探针激光刻蚀方法,包括以下步骤:
34.步骤a、参数计算
35.根据单晶硅圆片的刻蚀间距d,得到电机的步进角度δβ为:
[0036][0037]
其中,
[0038]
k为第一底板螺旋通槽螺旋线具有长度/弧度量纲的系数;
[0039]
l1为第二底板到物镜中心的距离;
[0040]
l2为单晶硅圆片上表面到物镜中心的距离;
[0041]
d1为第一侧边的分度圆直径;
[0042]
d2为齿轮的分度圆直径;
[0043]
步骤b、初始位置调整
[0044]
步骤b1、将旋转螺旋通槽板至初始位置,将第一刻蚀点移动至光轴;步骤b2、调整四维台:
[0045]
向上移动:
[0046][0047]
向右移动:
[0048][0049]
逆时针转动:
[0050][0051]
其中,
[0052]
l0为螺旋线距离第一底板圆心的最大距离;
[0053]
h1为单晶硅圆片的厚度;
[0054]
h2为四维台转轴中心到上表面的距离;
[0055]
步骤c、激光刻蚀
[0056]
点亮弧形光源至刻蚀完成;
[0057]
步骤d、进度判断
[0058]
判断现在的刻蚀行是否刻蚀完成,如果:
[0059]
是,四维台向前或向后移动,进入下一行刻蚀;
[0060]
否,进入步骤e;
[0061]
步骤e、调整四维台和电机
[0062]
具体为:
[0063]
四维台向下移动:
[0064]
(h1+h2)
·
cosγ
2-d
·
sinγ
2-(h1+h2)
·
cosγ1[0065]
四维台向左移动:
[0066][0067]
四维台顺时针转动:
[0068]
γ
1-γ2[0069]
电机转动:
[0070][0071]
其中,
[0072]
γ1为在当前刻蚀点,光束与光轴的夹角;
[0073]
γ2为在下一刻蚀点,光束与光轴的夹角;
[0074]
返回步骤c。
[0075]
上述一种mems探针激光刻蚀方法,应用于mems探针激光刻蚀装置。
[0076]
一种mems探针激光刻蚀电机与四维台驱动方法,由单晶硅圆片的刻蚀间距d,得到电机的步进角度,四维台向上或向下移动距离,向左或向右移动距离,顺时针或逆时针转动角度。
[0077]
上述mems探针激光刻蚀电机与四维台驱动方法,单晶硅圆片的刻蚀间距为d,那么:
[0078]
电机的步进角度δβ为:
[0079][0080]
四维台向上或向下移动:
[0081]
(h1+h2)
·
cosγ
2-d
·
sinγ
2-(h1+h2)
·
cosγ1[0082]
四维台向左或向右移动:
[0083][0084]
四维台顺时针或逆时针转动:
[0085]
γ
1-γ2[0086]
其中,
[0087]
k为第一底板螺旋通槽螺旋线具有长度/弧度量纲的系数;
[0088]
l1为第二底板到物镜中心的距离;
[0089]
l2为单晶硅圆片上表面到物镜中心的距离;
[0090]
d1为第一侧边的分度圆直径;
[0091]
d2为齿轮的分度圆直径;
[0092]
h1为单晶硅圆片的厚度;
[0093]
h2为四维台转轴中心到上表面的距离;
[0094]
γ1为在当前刻蚀点,光束与光轴的夹角;
[0095]
γ2为在下一刻蚀点,光束与光轴的夹角;
[0096]
所述四维台移动方向和转动方向由电机的转动方向决定。
[0097]
上述mems探针激光刻蚀电机与四维台驱动方法,应用于mems探针激光刻蚀装置。
[0098]
mems探针激光刻蚀装置用光学准焦结构,在mems探针激光刻蚀装置中,将螺旋通槽板用上一字通槽板代替,将直线通槽板用下一字通槽板代替,将单晶硅圆片用相同厚度的平面反射镜代替,所述上一字通槽板与螺旋通槽板中的第一底板厚度相同,下一字通槽板与直线通槽板中的第二底板厚度相同,平面反射镜与单晶硅圆片厚度相同,所述上一字通槽板上表面与下一字通槽板下表面紧贴;在下一字通槽板和物镜之间,设置有棱镜,在棱镜的侧边缘,设置有图像传感器,沿光轴方向,下一字通槽板的下表面到棱镜的距离与图像传感器像面到棱镜的距离相同。
[0099]
mems探针激光刻蚀装置用光学准焦方法,包括以下步骤:
[0100]
步骤a、替增元件
[0101]
替:在mems探针激光刻蚀装置中,将螺旋通槽板用上一字通槽板代替,将直线通槽板用下一字通槽板代替,将单晶硅圆片用平面反射镜代替;
[0102]
增:在下一字通槽板和物镜之间,设置有棱镜,在棱镜的侧边缘,设置有图像传感器,沿光轴方向,弧形光源的最高点到棱镜的距离与图像传感器像面到棱镜的距离相同;
[0103]
步骤b、数据获取
[0104]
四维台全量程上下移动一个周期,并在图像传感器上得到一系列准焦和离焦光斑图像,同时记录四维台在上下方向的位置与图像的映射关系;
[0105]
步骤c、数据处理
[0106]
根据图像传感器得到的准焦和离焦光斑图像,得到光斑直径,同时建立四维台在上下方向的位置与光斑直径的映射关系;
[0107]
步骤d、完成标定
[0108]
找到光斑直径最小值,并根据四维台在上下方向的位置与光斑直径的映射关系,
找到所述最小值所对应的四维台在上下方向的位置,并将四维台移动到所述位置。
[0109]
上述mems探针激光刻蚀装置用光学准焦方法,在步骤c中,根据图像传感器得到的准焦和离焦光斑图像,得到光斑直径,通过以下方法实现:设置灰度阈值,将光斑图像中灰度小于所述灰度阈值的像素置0,大于所述灰度阈值的像素置255,再将处理后得到的图像进行圆周拟合,拟合成圆形光斑,最后确定所述圆形光斑的光斑直径。
[0110]
上述mems探针激光刻蚀装置用光学准焦方法,在步骤c中,根据图像传感器得到的准焦和离焦光斑图像,得到光斑直径,通过以下方法实现:在准焦和离焦光斑图像中,选取以光斑中心为中心的固定区域,将所述固定区域内所有像素灰度值进行求和,将得到的计算结果的倒数作为光斑直径。
[0111]
有益效果:
[0112]
第一、在本发明mems探针激光刻蚀装置中,由于设置有弧形光源,且弧形光源的每一点到物镜中心距离相同,即弧形光源的形状为以物镜中心为圆心的圆弧形;弧形光源每一点的切线均与该点到物镜中心的连线垂直,因此能够提供直接照射到针孔处的光束,避免在本发明特殊结构下,受第一底板和第二底板厚度的影响,光束在不同位置能量分布不均而造成刻蚀深度不均的问题。
[0113]
第二、在本发明mems探针激光刻蚀装置中,由于形成点光源的针孔结构由螺旋通槽板和直线通槽板构成,且通过螺旋通槽板的转动实现针孔位置的改变,在这种结构下,可以实现针孔位置的连续改变,以适应不同刻蚀间距的探针,适用性更广;更重要的是,通过匹配弧形光源的曝光时间以及螺旋通槽板的转动步距角,可以实现刻蚀间距的动态调整,能够针对任意变间距的探针进行刻蚀。
[0114]
第三、在本发明mems探针激光刻蚀装置中,通过改变弧形光源的能量,可以实现刻蚀深度的调整;通过改变螺旋通槽板的转速,即可刻蚀速度的调整;进而可以满足不同参数下的刻蚀要求。
[0115]
第四、在本发明mems探针激光刻蚀装置中,由于刻蚀位置的改变是通过转动螺旋通槽板实现的,不同位置仅仅存在相同的圆度误差,相比于传统平移式的方式,不会出现位移误差的累计,因此从光束的精度来讲,更有利于更小间距的刻蚀,可以刻蚀精度。
[0116]
第五、在本发明mems探针激光刻蚀装置中,虽然相比于传统单方向刻蚀方式相比,由于光束从弧形光源经过针孔后,在不同的位置具有不同的照射角度,但是由于设置有四维台,且所述思维台能够根据刻蚀位置进行调整,因此无论形成点光源的针孔位于何处,都会实现垂直刻蚀,进而保证刻蚀精度。
[0117]
第六、在本发明mems探针激光刻蚀装置中,还设置有专门的mems探针激光刻蚀装置用光学准焦结构,并且设计有mems探针激光刻蚀装置用光学准焦方法,通过下一字通槽板到棱镜的距离与图像传感器像面到棱镜的距离相同的“共焦”设置,且利用扫描四维台在不同位置处光斑信息的方式,找到针孔结构与单晶硅圆片分别位于物镜的物面和像面时四维台的位置,进而实现在刻蚀之前对整个装置进行调整,确保针孔结构与单晶硅圆片之间严格满足物象关系,进而保证刻蚀精度。
[0118]
第七、在本发明mems探针激光刻蚀装置中,第一侧边分度圆直径越大,齿轮分度圆直径越小,精度越高,但速度越慢,而第一侧边分度圆直径越小,齿轮分度圆直径越大,精度越低,但速度越快;将第一侧边和齿轮选用变速器结构,即可改变电机到螺旋通槽板的传动
比,进而有利于更灵活地调整刻蚀速度和刻蚀精度。
附图说明
[0119]
图1是本发明mems探针激光刻蚀装置的结构示意图一。
[0120]
图2是本发明mems探针激光刻蚀装置中螺旋通槽板的结构示意图。
[0121]
图3是本发明mems探针激光刻蚀装置中直线通槽板的结构示意图。
[0122]
图4是螺旋通槽板和直线通槽板叠加在一起后形成针孔的结构示意图。
[0123]
图5是第二底板的结构示意图。
[0124]
图6是本发明mems探针激光刻蚀装置的结构示意图二。
[0125]
图7是本发明mems探针激光刻蚀方法的流程图。
[0126]
图8是初始位置调整过程第一步完成后各元件相对位置示意图。
[0127]
图9是初始位置调整过程第二步四维台调整前后的相对位置关系图。
[0128]
图10是相邻两次刻蚀之间四维台调整前后的相对位置关系图。
[0129]
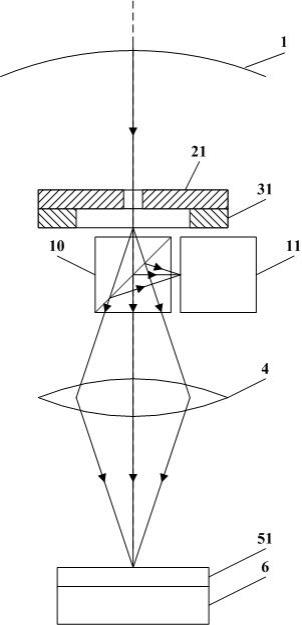
图11是本发明mems探针激光刻蚀装置用光学准焦结构的结构示意图。
[0130]
图12是本发明mems探针激光刻蚀装置用光学准焦方法的流程图。
[0131]
图中:1弧形光源、2螺旋通槽板、2-1第一底板、2-2第一侧边、3直线通槽板、3-1第二底板、3-2第二侧边、4物镜、5单晶硅圆片、6四维台、7齿轮、8电机、9控制器、10棱镜、11图像传感器、21上一字通槽板、31下一字通槽板、51平面反射镜。
具体实施方式
[0132]
下面结合附图对本发明具体实施方式作进一步详细描述。
[0133]
具体实施方式一
[0134]
以下是本发明mems探针激光刻蚀装置的具体实施方式。
[0135]
本实施方式下的mems探针激光刻蚀装置,结构示意图如图1所示,在所述mems探针激光刻蚀装置中,按照光线传播方向,依次设置弧形光源1,螺旋通槽板2,直线通槽板3,物镜4,单晶硅圆片5和四维台6;
[0136]
所述弧形光源1的每一点到物镜4中心距离相同,即弧形光源1的形状为以物镜4中心为圆心的圆弧形;弧形光源1每一点的切线均与该点到物镜4中心的连线垂直;
[0137]
所述螺旋通槽板2的结构示意图如图2所示,包括开有螺旋通槽的第一底板2-1和截面为圆环形的第一侧边2-2,所述侧边2-2的外表面设置有齿,形成齿轮结构,所述螺旋通槽的螺旋线满足如下关系:
[0138]
l(α)=l
0-kα
[0139]
其中,l0为螺旋线距离第一底板2-1圆心的最大距离,在螺旋通槽与直线通槽交点到第一底板2-1圆心的距离为所述最大距离时,定义第一底板2-1所处位置为初始位置;k为系数,具有长度/弧度的量纲,α为弧度,l(α)表示螺旋线从初始位置转动α后,螺旋通槽与直线通槽交点到第一底板2-1圆心的距离;
[0140]
所述直线通槽板3的结构示意图如图3所示,包括开有直线通槽的第二底板3-1和截面为圆环形的第二侧边3-2,所述第二侧边3-2的内圆直径大于第一侧边2-2的外圆直径,所述第二底板3-1上表面与第一底板2-1下表面紧贴;
[0141]
螺旋通槽板2和直线通槽板3叠加在一起后形成针孔的结构示意图如图4所示;
[0142]
所述单晶硅圆片5上表面与第二底板3-1分别位于物镜4的像面和物面,单晶硅圆片5能够在四维台6的承载下完成四维运动;
[0143]
所述四维台6能够完成三维平动和一维转动,所述转动在弧形光源1与光轴所确定的平面内进行。
[0144]
具体实施方式二
[0145]
以下是本发明mems探针激光刻蚀装置的具体实施方式。
[0146]
本实施方式下的mems探针激光刻蚀装置,在具体实施方式一的基础上,进一步限定:第二底板3-1的直线通槽周围设置有刮板,第二底板3-1上表面设置有多个与第二底板3-1同心的环形槽,所述环形槽起止于直线通槽周围的刮板;第二底板3-1上表面还设置有半径方向的直线槽,所述环形槽与直线槽交叉连通,环形槽与直线槽内灌有润滑油,如图5所示,所述润滑油从第一侧边2-2与第二侧边3-2之间滴入。
[0147]
具体实施方式三
[0148]
以下是本发明mems探针激光刻蚀装置的具体实施方式。
[0149]
本实施方式下的mems探针激光刻蚀装置,在具体实施方式一或具体实施方式二的基础上,进一步限定:mems探针激光刻蚀装置的结构,如图6所示,所述第一侧边2-2外部啮合有齿轮7,所述齿轮由电机8控制旋转,所述电机8连接控制器9,所述控制器9连接四维台6。
[0150]
具体实施方式四
[0151]
以下是本发明mems探针激光刻蚀装置的具体实施方式。
[0152]
本实施方式下的mems探针激光刻蚀装置,在具体实施方式三的基础上,进一步限定:所述第一侧边2-2与齿轮7之间为变速器结构。
[0153]
具体实施方式五
[0154]
以下是本发明面向mems探针激光刻蚀装置的针孔结构的具体实施方式。
[0155]
本实施方式下的面向mems探针激光刻蚀装置的针孔结构,包括螺旋通槽板2和直线通槽板3;
[0156]
所述螺旋通槽板2的结构示意图如图2所示,包括开有螺旋通槽的第一底板2-1和截面为圆环形的第一侧边2-2,所述侧边2-2的外表面设置有齿,形成齿轮结构,所述螺旋通槽的螺旋线满足如下关系:
[0157]
l(α)=l
0-kα
[0158]
其中,l0为螺旋线距离第一底板2-1圆心的最大距离,在螺旋通槽与直线通槽交点到第一底板2-1圆心的距离为所述最大距离时,定义第一底板2-1所处位置为初始位置;k为系数,具有长度/弧度的量纲,α为弧度,l(α)表示螺旋线从初始位置转动α后,螺旋通槽与直线通槽交点到第一底板2-1圆心的距离;
[0159]
所述直线通槽板3的结构示意图如图3所示,包括开有直线通槽的第二底板3-1和截面为圆环形的第二侧边3-2,所述第二侧边3-2的内圆直径大于第一侧边2-2的外圆直径,所述第二底板3-1上表面与第一底板2-1下表面紧贴;
[0160]
螺旋通槽板2和直线通槽板3叠加在一起后形成针孔的结构示意图如图4所示;
[0161]
所述第二底板3-1的直线通槽周围设置有刮板,第二底板3-1上表面设置有多个与
第二底板3-1同心的环形槽,所述环形槽起止于直线通槽周围的刮板;第二底板3-1上表面还设置有半径方向的直线槽,所述环形槽与直线槽交叉连通,环形槽与直线槽内灌有润滑油,如图5所示,所述润滑油从第一侧边2-2与第二侧边3-2之间滴入。
[0162]
具体实施方式六
[0163]
以下是本发明mems探针激光刻蚀方法的具体实施方式。
[0164]
本实施方式下的mems探针激光刻蚀方法,在具体实施方式一、具体实施方式二、具体实施方式三或具体实施方式四下的mems探针激光刻蚀装置上实施。
[0165]
所述mems探针激光刻蚀方法,流程图如图7所示,包括以下步骤:
[0166]
步骤a、参数计算
[0167]
根据单晶硅圆片5的刻蚀间距d,得到电机8的步进角度δβ为:
[0168][0169]
其中,
[0170]
k为第一底板2-1螺旋通槽螺旋线具有长度/弧度量纲的系数;
[0171]
l1为第二底板3-1到物镜4中心的距离;
[0172]
l2为单晶硅圆片5上表面到物镜4中心的距离;
[0173]
d1为第一侧边2-2的分度圆直径;
[0174]
d2为齿轮7的分度圆直径;
[0175]
步骤b、初始位置调整
[0176]
步骤b1、将旋转螺旋通槽板2至初始位置,将第一刻蚀点移动至光轴,如图8所示;
[0177]
步骤b2、调整四维台6:
[0178]
向上移动:
[0179][0180]
向右移动:
[0181][0182]
逆时针转动:
[0183][0184]
其中,
[0185]
l0为螺旋线距离第一底板2-1圆心的最大距离;
[0186]
h1为单晶硅圆片5的厚度;
[0187]
h2为四维台6转轴中心到上表面的距离;
[0188]
四维台6调整前后的相对位置关系如图9所示;
[0189]
步骤c、激光刻蚀
[0190]
点亮弧形光源1至刻蚀完成;
[0191]
步骤d、进度判断
[0192]
判断现在的刻蚀行是否刻蚀完成,如果:
[0193]
是,四维台6向前或向后移动,进入下一行刻蚀;
[0194]
否,进入步骤e;
[0195]
步骤e、调整四维台6和电机8
[0196]
具体为:
[0197]
四维台6向下移动:
[0198]
(h1+h2)
·
cosγ
2-d
·
sinγ
2-(h1+h2)
·
cosγ1[0199]
四维台6向左移动:
[0200][0201]
四维台6顺时针转动:
[0202]
γ
1-γ2[0203]
电机8转动:
[0204][0205]
其中,
[0206]
γ1为在当前刻蚀点,光束与光轴的夹角;
[0207]
γ2为在下一刻蚀点,光束与光轴的夹角;
[0208]
相邻两次刻蚀之间四维台6调整前后的相对位置关系如图10所示;
[0209]
返回步骤c。
[0210]
具体实施方式七
[0211]
以下是本发明mems探针激光刻蚀电机与四维台驱动方法的具体实施方式。
[0212]
本实施方式下的mems探针激光刻蚀电机与四维台驱动方法,在具体实施方式一、具体实施方式二、具体实施方式三或具体实施方式四下的mems探针激光刻蚀装置上实施。
[0213]
所述mems探针激光刻蚀电机与四维台驱动方法,由单晶硅圆片5的刻蚀间距d,得到电机8的步进角度,四维台6向上或向下移动距离,向左或向右移动距离,顺时针或逆时针转动角度。
[0214]
具体实施方式八
[0215]
以下是本发明mems探针激光刻蚀电机与四维台驱动方法的具体实施方式。
[0216]
本实施方式下的mems探针激光刻蚀电机与四维台驱动方法,在具体实施方式一、具体实施方式二、具体实施方式三或具体实施方式四下的mems探针激光刻蚀装置上实施;且在具体实施方式六的基础上,进一步限定:
[0217]
单晶硅圆片5的刻蚀间距为d,那么:
[0218]
电机8的步进角度δβ为:
[0219][0220]
四维台6向上或向下移动:
[0221]
(h1+h2)
·
cosγ
2-d
·
sinγ
2-(h1+h2)
·
cosγ1[0222]
四维台6向左或向右移动:
[0223][0224]
四维台6顺时针或逆时针转动:
[0225]
γ
1-γ2[0226]
其中,
[0227]
k为第一底板2-1螺旋通槽螺旋线具有长度/弧度量纲的系数;
[0228]
l1为第二底板3-1到物镜4中心的距离;
[0229]
l2为单晶硅圆片5上表面到物镜4中心的距离;
[0230]
d1为第一侧边2-2的分度圆直径;
[0231]
d2为齿轮7的分度圆直径;
[0232]
h1为单晶硅圆片5的厚度;
[0233]
h2为四维台6转轴中心到上表面的距离;
[0234]
γ1为在当前刻蚀点,光束与光轴的夹角;
[0235]
γ2为在下一刻蚀点,光束与光轴的夹角;
[0236]
相邻两次刻蚀之间四维台6调整前后的相对位置关系如图10所示;
[0237]
所述四维台6移动方向和转动方向由电机8的转动方向决定。
[0238]
具体实施方式九
[0239]
以下是本发明mems探针激光刻蚀装置用光学准焦结构的具体实施方式。
[0240]
本实施方式下的mems探针激光刻蚀装置用光学准焦结构,以具体实施方式一、具体实施方式二、具体实施方式三或具体实施方式四下的mems探针激光刻蚀装置为基础,在以上mems探针激光刻蚀装置中,将螺旋通槽板2用上一字通槽板21代替,将直线通槽板3用下一字通槽板31代替,将单晶硅圆片5用相同厚度的平面反射镜51代替,所述上一字通槽板21与螺旋通槽板2中的第一底板2-1厚度相同,下一字通槽板31与直线通槽板3中的第二底板3-1厚度相同,平面反射镜51与单晶硅圆片5厚度相同,所述上一字通槽板21上表面与下一字通槽板31下表面紧贴;在下一字通槽板31和物镜4之间,设置有棱镜10,在棱镜10的侧边缘,设置有图像传感器11,沿光轴方向,下一字通槽板31的下表面到棱镜10的距离与图像传感器11像面到棱镜10的距离相同,结构示意图如图11所示,需要说明的是,图11是以图1所示的mems探针激光刻蚀装置为基础的。
[0241]
具体实施方式十
[0242]
以下是本发明mems探针激光刻蚀装置用光学准焦方法的具体实施方式。
[0243]
本实施方式下的mems探针激光刻蚀装置用光学准焦方法,在具体实施方式九下的mems探针激光刻蚀装置用光学准焦结构上实施。
[0244]
所述mems探针激光刻蚀装置用光学准焦方法,流程图如图12所示,包括以下步骤:
[0245]
步骤a、替增元件
[0246]
替:在mems探针激光刻蚀装置中,将螺旋通槽板2用上一字通槽板21代替,将直线通槽板3用下一字通槽板31代替,将单晶硅圆片5用平面反射镜51代替;
[0247]
增:在下一字通槽板31和物镜4之间,设置有棱镜10,在棱镜10的侧边缘,设置有图
像传感器11,沿光轴方向,弧形光源1的最高点到棱镜10的距离与图像传感器11像面到棱镜10的距离相同;
[0248]
步骤b、数据获取
[0249]
四维台6全量程上下移动一个周期,并在图像传感器11上得到一系列准焦和离焦光斑图像,同时记录四维台6在上下方向的位置与图像的映射关系;
[0250]
步骤c、数据处理
[0251]
根据图像传感器11得到的准焦和离焦光斑图像,得到光斑直径,同时建立四维台6在上下方向的位置与光斑直径的映射关系;
[0252]
步骤d、完成标定
[0253]
找到光斑直径最小值,并根据四维台6在上下方向的位置与光斑直径的映射关系,找到所述最小值所对应的四维台6在上下方向的位置,并将四维台6移动到所述位置。
[0254]
具体实施方式十一
[0255]
以下是本发明mems探针激光刻蚀装置用光学准焦方法的具体实施方式。
[0256]
本实施方式下的mems探针激光刻蚀装置用光学准焦方法,在具体实施方式十的基础上,进一步限定:在步骤c中,根据图像传感器11得到的准焦和离焦光斑图像,得到光斑直径,通过以下方法实现:设置灰度阈值,将光斑图像中灰度小于所述灰度阈值的像素置0,大于所述灰度阈值的像素置255,再将处理后得到的图像进行圆周拟合,拟合成圆形光斑,最后确定所述圆形光斑的光斑直径。
[0257]
具体实施方式十二
[0258]
以下是本发明mems探针激光刻蚀装置用光学准焦方法的具体实施方式。
[0259]
本实施方式下的mems探针激光刻蚀装置用光学准焦方法,在具体实施方式十的基础上,进一步限定:在步骤c中,根据图像传感器11得到的准焦和离焦光斑图像,得到光斑直径,通过以下方法实现:在准焦和离焦光斑图像中,选取以光斑中心为中心的固定区域,将所述固定区域内所有像素灰度值进行求和,将得到的计算结果的倒数作为光斑直径。
[0260]
最后需要说明的是,在以上所有具体实施方式中所出现的技术特征,只要不矛盾,都可以进行排列组合,本领域技术人员能够根据高中阶段学习过的排列组合数学知识穷尽每一种排列组合后的结果,所有排列组合后的结果都应该理解为被本申请所公开。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1