一种自动放螺母机构的制作方法
[0001]
本实用新型涉及电机制造技术领域,尤其涉及自动放螺母的机构。
背景技术:
[0002]
电机或者马达的组装过程一般先在治具的螺母位内放入螺母,再往治具上装底壳,待电机组装完成以后,通过螺栓配合螺母将上壳和底壳栓牢固;部分中小企业在往治具上的螺母位内投入螺母的操作普遍通过人工来完成,由于人工操作存在易疲劳等因数影响,导致生产效率降低。
技术实现要素:
[0003]
本实用新型的目的在于提供一种实现往治具的螺母位内自动上螺母,以提高生产效率的自动放螺母机构,以解决背景技术中所提出的问题。
[0004]
为了实现上述目的,本实用新型所采取的技术方案如下:一种自动放螺母机构,包括振动盘和中继板,所述中继板上开设有与振动盘相配合的螺母孔,本实用新型还包括取放机构和移载机构,所述振动盘设于取放机构的下方,所述移载机构驱动夹取机构沿x轴和z轴移动;
[0005]
所述取放机构包括夹取气缸和两块夹持板,所述夹取气缸驱动两块夹持板相互远离或相互靠拢。
[0006]
进一步地,所述夹持板靠近另一块夹持板的一侧开设有凹槽。
[0007]
进一步地,所述取放机构还包括顶出气缸和顶棒,所述顶出气缸驱动顶棒在凹槽内往返移动。
[0008]
进一步地,所述移载机构包括沿x轴设置的无杆气缸和升降气缸,所述无杆气缸驱动升降气缸沿x轴往返移动,所述升降气缸驱动夹取气缸沿z轴往返移动。
[0009]
进一步地,还包括检测机构,所述检测机构包括第一气缸、设于第一气缸下端的支撑板、与支撑板固定连接的侧板、检测棒和固设于侧板上的光电感应器,所述第一气缸驱动支撑板沿z轴往返移动,所述检测棒的上端固设有与光电感应器相配合的检测帽,所述光电感应器位于检测帽的上方,所述检测棒贯穿支撑板的上下两端,且检测帽的下端与支撑板的上端相抵。
[0010]
进一步地,所述检测棒的圆柱面还套有弹簧,所述检测棒的下部设置有台阶,所述弹簧的一端与台阶相抵,另一端抵于支撑板的下端。
[0011]
本实用新型的有益效果为:本实用新型通过将螺母倾倒至震动盘,振动盘将螺母震动到螺母孔,且使螺母平躺于螺母孔内,此时螺母孔的上部位于螺母孔外,移载机构驱动夹取气缸沿z轴向下移动,通过夹取气缸夹住螺母,移载机构驱动夹取气缸移动至治具上方,通过夹取气缸将螺母放在治具的螺母位,从而使本实用新型实现往治具的螺母位内自动上螺母的目的,与传统的通过人工操作相比,一定程度上提高了生产效率。
附图说明
[0012]
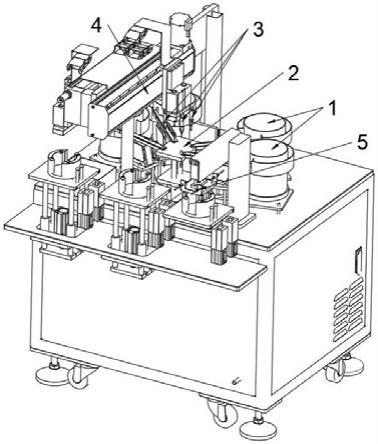
图1是本实用新型的整体结构示意图;
[0013]
图2是本实用新型的整体结构俯视图;
[0014]
图3是本实用新型的部分结构示意图;
[0015]
图4是图3中的a处放大图;
[0016]
图5是图3中的b处放大图。
[0017]
附图标记为:
[0018]
振动盘1,中继板2,
[0019]
取放机构3,夹取气缸31,夹持板32,顶出气缸33,顶棒34,
[0020]
移载机构4,无杆气缸41,升降气缸42,
[0021]
检测机构5,第一气缸51,支撑板52,侧板53,检测棒54,弹簧55,光电感应器56,检测帽57。
具体实施方式
[0022]
以下结合附图对本实用新型进行进一步说明,如图1至图5所示的一种自动放螺母机构,包括振动盘1、中继板2、取放机构3、移载机构4和检测机构5,中继板2上开设有与振动盘1相配合的螺母孔,振动盘1设于取放机构3的下方;螺母孔有四个,呈矩形阵列排布,螺母孔的排布与治具上的螺母位的排布一致,振动盘1有四个,且分别与四个螺母孔相对应,通过振动盘1的振动,使螺母平放在螺母孔内,螺母被振动至螺母孔内以后,螺母的上部位于螺母孔外,利于取放机构3夹取螺母。
[0023]
取放机构3包括夹取气缸31、两块夹持板32、顶出气缸33和顶棒34,移载机构4驱动夹取机构沿x轴和z轴移动,沿x轴移动即沿垂直方向往返移动,沿z轴移动即沿垂直方向往返移动,夹取气缸31驱动两块夹持板32相互远离或相互靠拢;夹持板32靠近另一块夹持板32的一侧开设有凹槽,顶出气缸33驱动顶棒34在凹槽内往返移动;凹槽的内壁形状与螺母相对应,螺母位于螺母孔内之后,移载机构4驱动夹取气缸31向下移动,夹取气缸31驱动两块夹持板32相互并拢,正好将螺母夹持在两个凹槽所组成的空间内,移载机构4驱动升降机构移动至治具上方,使螺母对准治具上的螺母位,顶出气缸33驱动顶棒34向两个凹槽内顶出,将螺母顶至治具的螺母位内。
[0024]
取放机构3设置有四组,且呈矩形阵列排列,其排列方式与四个螺母孔的排布相一致,移载机构4同时驱动四组取放机构3移动,四组取放机构3可同时夹取四个螺母孔内的螺母。
[0025]
移载机构4包括沿x轴设置的无杆气缸41和升降气缸42,无杆气缸41驱动升降气缸42沿x轴往返移动,沿x轴往返移动即沿水平方向往返移动,升降气缸42驱动夹取气缸31沿z轴往返移动,沿z轴往返移动即沿垂直方向往返移动,升降气缸42的外壳与无杆气缸41的活塞固定连接,夹取气缸31的外壳与升降气缸42的伸缩杆固定连接。
[0026]
检测机构5包括第一气缸51、设于第一气缸51下端的支撑板52、与支撑板52固定连接的侧板53、四组检测棒54、四组弹簧55、固设于侧板53上的四组光电感应器56和plc,第一气缸51驱动支撑板52沿z轴往返移动,每个检测棒54的上端固设有与光电感应器56相配合的检测帽57,检测棒54贯穿支撑板52的上下两端,且检测帽57的下端与支撑板52的上端相
抵;四个检测棒54呈矩形阵列排列,其排列方式与四个螺母孔的排列方式一致,光电感应器56位于检测帽57的上方,且每个光电感应器56对应的检测其中一个检测帽57,光电感应器56与plc信号连接,每个弹簧55相应的套在一个检测棒54的圆柱面,检测棒54的下部设置有台阶,弹簧55的一端与台阶相抵,另一端抵于支撑板52的下端。
[0027]
放好四颗螺母的治具被输送至检测机构5的下方,第一气缸51驱动支撑板52向下伸出,使检测棒54的下端向治具的螺母位内移动,当治具的螺母位内有螺母时,检测棒54的下端往治具的螺母位内移动之后,检测棒54会被螺母向上顶起,使检测帽57的位置被抬高至光电感应器56的感应范围,光电感应器56感应到检测帽57以后,将信号传输至plc;当治具的螺母位内没有螺母时,检测棒54的下端往治具的螺母位内移动之后,检测棒54的下端会直接伸入治具的螺母位内,此时检测帽57没有被顶起,相应的光电感应器56感应不到检测帽57,plc接收不到相应的光电感应器56的信号,则由plc提示缺螺母。
[0028]
本实用新型的工作原理为:通过振动盘1的振动,使螺母平放在螺母孔内,螺母被振动至螺母孔内以后,螺母的上部位于螺母孔外,利于取放机构3夹取螺母;移载机构4驱动夹取气缸31向下移动,夹取气缸31驱动两块夹持板32相互并拢,正好将螺母夹持在两个凹槽所组成的空间内,移载机构4驱动升降机构移动至治具上方,使螺母对准治具上的螺母位,顶出气缸33驱动顶棒34向两个凹槽内顶出,将螺母顶至治具的螺母位内;放好四颗螺母的治具被输送至检测机构5的下方,第一气缸51驱动支撑板52向下伸出,使检测棒54的下端向治具的螺母位内移动,当治具的螺母位内有螺母时,检测棒54的下端往治具的螺母位内移动之后,检测棒54会被螺母向上顶起,使检测帽57的位置被抬高至光电感应器56的感应范围,光电感应器56感应到检测帽57以后,将信号传输至plc;当治具的螺母位内没有螺母时,检测棒54的下端往治具的螺母位内移动之后,检测棒54的下端会直接伸入治具的螺母位内,此时检测帽57没有被顶起,相应的光电感应器56感应不到检测帽57,plc接收不到相应的光电感应器56的信号,则由plc提示缺螺母。
[0029]
以上并非对本实用新型的技术范围作任何限制,凡依据本实用新型技术实质对以上的实施例所作的任何修改、等同变化与修饰,均仍属于本实用新型的技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1