一种一体化连续模用搬运机构的制作方法
[0001]
本实用新型涉及连续模技术领域,更具体地说,涉及一种一体化连续模用搬运机构。
背景技术:
[0002]
目前连续模自动生产产品切断分离后,产品就掉出模具进入料箱,无法再进行二次加工。现我们的产品要求模具连料切断处的毛刺必须去除,按现在的模具无法在连续模具内完成,而是需要另外一套模具人工操作去毛刺,其中人工一个一个完成去毛刺,此人工的效率只有连续模效率的四分之一,不仅延长了生产时间,而且还增加了人工成本。
技术实现要素:
[0003]
实用新型要解决的技术问题
[0004]
本实用新型的目的在于克服现有技术中不足,提供了一种一体化连续模用搬运机构,本方案中通过在连续模中设置此搬运机构,使得在一套连续模中可以完成并且可以同时进行产品的废料切除和产品切割面压毛刺的工序,不仅节约了一套压毛刺模具的投入,而且从此连续模中切断后的产品不需要再投入时间和人工进行压毛刺。
[0005]
技术方案
[0006]
为达到上述目的,本实用新型提供的技术方案为:
[0007]
本实用新型的一种一体化连续模用搬运机构,包括其夹爪可夹紧产品的夹紧气缸,所述夹爪上设有两对分别对应下模上切断工位上产品、压毛刺工位上产品的夹槽,所述夹紧气缸的缸体固定在连接板上,所述连接板固定在可在来料方向上伸缩的搬运气缸的活塞杆上,所述搬运气缸的缸体通过l型固定板固定在下模底座上。
[0008]
作为本实用新型更进一步的改进,所述夹爪的每个爪均包括支臂、抵紧块和设有两个夹槽的夹头,所述支臂上设有两组与上述两个夹槽一一对应的配位槽,所述配位槽包括由内至外依次设置在支臂上的第一圆弧导向槽、u形导向槽,所述夹爪的其中一个爪的两个u形导向槽的外部均设有接近传感器,所述接近传感器通过连杆固定在支臂上,且接近传感器与控制器电连接;每个夹槽的槽底且贯穿其由内至外均依次设有压头导向孔、圆形避让孔,每个夹槽的上夹臂均向外延伸有伸出部,且两个伸出部之间通过连接板固连,所述伸出部的下端面设有沿伸出部长度方向上贯通的第二圆弧导向槽;
[0009]
在支臂与夹头连接时,所述第二圆弧导向槽、第一圆弧导向槽组成圆形孔,所述圆形孔与圆形避让孔共同组成供弹簧伸缩的且可使抵紧块上压头穿过的避让孔,所述避让孔远离圆形避让孔的一端与u形导向槽之间形成阶梯面,上述抵紧块其压头的一端与压头导向孔配合,其连接段穿过避让孔中的弹簧与u形导向槽配合且其端部的限位部抵在支臂侧面上,其中,所述弹簧的一端抵在压头上且在弹簧自然状态的情况下压头伸出于压头导向孔,弹簧的另一端抵在上述阶梯面上。
[0010]
有益效果
[0011]
采用本实用新型提供的技术方案,与现有技术相比,具有如下有益效果:
[0012]
(1)本实用新型的一种一体化连续模用搬运机构,其中,通过在连续模中设置此搬运机构,使得在一套连续模中可以完成并且可以同时进行产品的废料切除和产品切割面压毛刺的工序,不仅节约了一套压毛刺模具的投入,而且从此连续模中切断后的产品不需要再投入时间和人工进行压毛刺。
[0013]
(2)本实用新型的一种一体化连续模用搬运机构,其中,在夹槽中设置与弹簧配合的抵紧块,使得在夹爪夹紧产品时,随着夹紧气缸的不断夹紧,抵紧块的压头逐渐压缩弹簧,进而使得夹爪一个爪上的两个抵紧块的尾部均逐渐靠近与其相对应的接近传感器,当压头运动至与夹槽槽底齐平时,则接近传感器检测到抵紧块并将此信号传递给控制器,且当控制器同时接收到此两个接近传感器的信号时,则控制夹紧气缸停止夹紧产品,此处通过抵紧块、弹簧和接近传感器的配合作用,使得在夹紧产品时不仅利用一对夹槽夹紧产品,而且夹槽中的抵紧块在弹簧的作用下也紧抵在产品上,提高了产品的夹紧效果,更重要的是在产品夹紧过程中当压头运动至与夹槽槽底齐平时,可利用接近传感器将此反馈给控制器,以使控制器控制夹紧气缸停止夹紧,进而使得产品在夹紧的同时又不会使产品夹变形。
[0014]
(3)本实用新型的一种一体化连续模用搬运机构,结构设计合理,原理简单,便于推广使用。
附图说明
[0015]
图1为本实用新型的一种一体化连续模用搬运机构缩回放料的状态图;
[0016]
图2为本实用新型的一种一体化连续模用搬运机构伸出取料的状态图;
[0017]
图3为本实用新型的一种一体化连续模用搬运机构的结构示意图;
[0018]
图4为图3中a处的放大图;
[0019]
图5为本实用新型中支臂的结构示意图;
[0020]
图6为本实用新型中夹头的正面结构示意图;
[0021]
图7为本实用新型中夹头的背面结构示意图;
[0022]
图8为本实用新型中抵紧块的结构示意图;
[0023]
图9为本实用新型中抵紧块与支臂配合的结构示意图;
[0024]
图10为本实用新型中限位部与支臂配合的结构示意图;
[0025]
图11为本实用新型中切断工位与去毛刺工位的布置状态图;
[0026]
图12为本实用新型中去毛刺工位的结构示意图。
[0027]
示意图中的标号说明:
[0028]
01、切断工位;011、废料落料口;02、压毛刺工位;021、支撑块;022、导柱;0221、导向斜面;0222、竖直固定面;023、顶杆;
[0029]
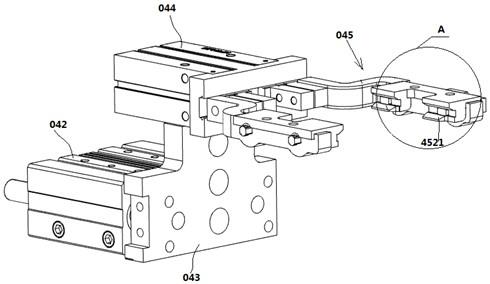
03、送料位置感应器;04、搬运机构;041、l型固定板;042、搬运气缸;043、连接板;044、夹紧气缸;045、夹爪;
[0030]
0451、支臂;4511、第一圆弧导向槽;4512、u形导向槽;
[0031]
0452、夹头;4521、夹槽;4522、压头导向孔;4523、圆形导向孔;4524、第二圆弧导向槽;
[0032]
0453、抵紧块;4531、压头;5432、连接段;5433、限位部;
[0033]
0454、接近传感器;0455、弹簧;05、产品落料口。
具体实施方式
[0034]
为进一步了解本实用新型的内容,结合附图和实施例对本实用新型作详细描述。
[0035]
实施例1
[0036]
如图1、图2、图3、图11和图12所示,本实施例的一种切断压毛刺一体化连续模,包括控制器、下模和固定在压机上的上模,在上模、下模上相对应的依次设有切断工位01、压毛刺工位02,在压毛刺工位02的后侧还设有产品落料口05,本实施例中下模上的切断工位01包括位于下模底座上的定位座,定位座上且沿来料方向上依次设有产品支撑面、废料落料口011、产品支撑面,且废料落料口011贯通下模底座;上模上的切断工位01包括与上述废料落料口011相配合以切断废料的冲头。下模上的压毛刺工位02包括与上述定位座位于同一直线上且低于定位座的支撑块021,支撑块021的上端面设有沿支撑块021宽度方向上贯通的且供产品压毛刺的定位槽,定位槽的槽底且依次贯穿支撑块021、下模底座设有多根顶杆023,具体地本实施例中定位槽的槽底设有四根顶杆023,且四根顶杆023呈十字型分布。在顶杆023上套设有可将产品顶起并使此产品与上述产品支撑面上产品等高的复位弹簧;定位槽两侧壁的每一侧壁处均设有两个低于定位座的导柱022,导柱022上且靠近定位槽的端面上由上至下依次设有导向斜面0221、竖直固定面0222,且导向斜面0221为由向靠近定位槽方向向下倾斜的斜面;上模上的压毛刺工位02包括与定位槽配合的压块和与导柱022相配合的导向配合孔。
[0037]
本实施例的一体化连续模还包括搬运机构04,搬运机构04包括其夹爪045可夹紧产品的夹紧气缸044,夹爪045上设有两对分别对应切断工位01上产品、压毛刺工位02上产品的夹槽4521,夹紧气缸044的缸体固定在连接板043上,连接板043固定在可在来料方向上伸缩的搬运气缸042的活塞杆上,搬运气缸042的缸体通过l型固定板041固定在下模底座上;其中,下模底座上且位于切断工位01的一侧还设有送料位置感应器03,送料位置感应器03、压机、夹紧气缸044、搬运气缸042均与控制器电连接。
[0038]
在使用时,当送料位置感应器03检测到在靠近压毛刺工位02的定位座产品支撑面上有料带时,则将此信号传递给控制器,则由控制器控制压机工作使下模下移进而同时进行废料切除和产品切割面压毛刺,当压机完成废料切除和产品切割面压毛刺后,控制器控制搬运气缸042伸出且当夹紧气缸044夹爪上的前后两对夹槽4521分别对准切断工位01、压毛刺工位02上产品时,控制器再控制夹紧气缸044夹紧切断工位01、压毛刺工位02上的产品,当夹紧气缸044夹紧产品后,再由控制器控制搬运气缸042缩回且当夹紧气缸044夹爪上前后两对夹槽4521上的产品分别对准压毛刺工位02、产品落料口05时,控制器控制夹紧气缸044松开,此时前后两对夹槽4521上的产品分别落入压毛刺工位02、产品落料口05,于此同时料带又送到了靠近压毛刺工位02的定位座产品支撑面上,继而重复上述步骤,以完成整根料带的切断和产品压毛刺工序。
[0039]
需要说明的是:本实施例中通过在连续模中设置搬运机构,使得在一套连续模中可以完成并且可以同时进行产品的废料切除和产品切割面压毛刺的工序,不仅节约了一套压毛刺模具的投入,而且从此连续模中切断后的产品不需要再投入时间和人工进行压毛刺,并且此连续模的压毛刺效率高。
[0040]
如图4、图5、图6、图7、图8、图9和图10所示,本实施例的夹爪045的每个爪均包括支臂0451、抵紧块0453和设有两个夹槽4521的夹头0452,支臂0451上设有两组与上述两个夹槽一一对应的配位槽,配位槽包括由内至外依次设置在支臂0451上的第一圆弧导向槽4511、u形导向槽4512,夹爪045的其中一个爪的两个u形导向槽4512的外部均设有接近传感器0454,接近传感器0454通过连杆固定在支臂0451上,且接近传感器0454与控制器电连接;每个夹槽4521的槽底且贯穿其由内至外均依次设有压头导向孔4522、圆形避让孔4523,每个夹槽4521的上夹臂均向外延伸有伸出部,且两个伸出部之间通过连接板固连,伸出部的下端面设有沿伸出部长度方向上贯通的第二圆弧导向槽4524;
[0041]
在支臂0451与夹头0452连接时,第二圆弧导向槽4524、第一圆弧导向槽4511组成圆形孔,圆形孔与圆形避让孔4523共同组成供弹簧0455伸缩的且可使抵紧块0453上压头4531穿过的避让孔,避让孔远离圆形避让孔4523的一端与u形导向槽4512之间形成阶梯面,上述抵紧块0453其压头4531的一端与压头导向孔4522配合,其连接段5432穿过避让孔中的弹簧0455与u形导向槽4512配合且其端部的限位部5433抵在支臂0451侧面上,其中,弹簧的一端抵在压头4531上且在弹簧0455自然状态的情况下压头4531伸出于压头导向孔4522,弹簧0455的另一端抵在上述阶梯面上。
[0042]
需要解释的是:本实施例在夹槽4521中设置与弹簧0455配合的抵紧块0453,使得在夹爪045夹紧产品时,随着夹紧气缸044的不断夹紧,抵紧块0453的压头4531逐渐压缩弹簧0455,进而使得夹爪045一个爪上的两个抵紧块0453的尾部均逐渐靠近与其相对应的接近传感器0454,当压头4531运动至与夹槽4521槽底齐平时,则接近传感器0454检测到抵紧块0453并将此信号传递给控制器,且当控制器同时接收到此两个接近传感器0454的信号时,则控制夹紧气缸044停止夹紧产品。此处通过抵紧块0453、弹簧0455和接近传感器0454的配合作用,使得在夹紧产品时不仅利用一对夹槽4521夹紧产品,而且夹槽4521中的抵紧块0453在弹簧0455的作用下也紧抵在产品上,提高了产品的夹紧效果,更重要的是在产品夹紧过程中当压头4531运动至与夹槽4521槽底齐平时,可利用接近传感器0454将此反馈给控制器,以使控制器控制夹紧气缸044停止夹紧,进而使得产品在夹紧的同时又不会使产品夹变形。
[0043]
以上示意性的对本实用新型及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1