一种基于机器视觉的点弧焊一体机
1.本实用新型涉及焊接技术领域,特别是涉及一种基于机器视觉的点弧焊一体机。
背景技术:
2.弧焊技术是现代焊接技术的重要组成部分,其应用范围几乎涵盖了所有的焊接生产领域。近年来随着市场竞争的日趋激烈,提高焊接生产的生产率、保证产品质量、实现焊接生产的自动化、智能化越来越得到焊接生产企业的重视。而人工智能技术、计算机视觉技术、数字化信息处理技术、机器人技术等现代高新技术的溶入,也促使弧焊技术正向着焊接工艺高效化、焊接电源控制数字化、焊接质量控制智能化、焊接生产过程机器人化的方向发展。
3.汽车工业是点焊机器人一个典型的应用领域。一般装配每辆汽车车体大约需要完成3000
‑
4000个焊点,而其中的60%是由机器人完成的。目前,按照传统工艺设计理念,要想完成点焊和弧焊工作,必须由一个机器人点焊工作站和一个机器人弧焊工作站进行流水作业。点焊和弧焊两台机器人先后分别对工件作业时具有作业时间长、占地面积大、时间成本高、生产节拍低等缺点。。
技术实现要素:
4.基于上述,提供一种具备点焊功能和弧焊功能,且由机器视觉引导的点弧焊一体机。不仅焊接精度高、效率高,且更安全。此外,结构简单,易于实现。
5.一种基于机器视觉的点弧焊一体机,包括半圆环形轨道、与所述半圆环形轨道滑动连接的滑块小车;所述半圆环形轨道上固定设置有半圆环形齿条,所述半圆环形齿条的圆心与所述半圆环形轨道的圆心相同;所述滑块小车上设置有驱动齿轮,所述驱动齿轮与所述半圆环形齿条通过轮齿啮合连接,所述驱动齿轮与驱动电机连接,以通过所述驱动齿轮的转动带动所述滑块小车在所述半圆环形轨道上滑动;所述滑块小车上还设置有多关节机械臂,所述机械臂的末端旋转轴上设置有点焊机和弧焊机,以通过控制所述机械臂各个旋转轴的转动来选择使用点焊机或弧焊机;所述机械臂的末端旋转轴上还设置有第一柔性安装臂,所述第一柔性安装臂的末端设置有第一摄像头、所述第一摄像头的镜头前端设置有液晶屏,通过调节所述第一柔性安装臂使所述第一摄像头始终对准所述点焊机或所述弧焊机的焊接头,即使所述点焊机或所述弧焊机的焊接头始终落在所述第一摄像头的拍摄范围内;在工作过程中,驱动所述液晶屏各个像素单元开闭的电流频率与所述点焊机或所述弧焊机的焊接电流频率相同,电流相位相差180度,即驱动电流的相位相反。所述液晶屏用于屏蔽所述点焊机或所述弧焊机焊接时的亮斑;所述第一摄像头用于获取焊接过程中工件上待焊位置坐标、焊点及焊缝的画面。
6.在其中一个实施例中,驱动所述液晶屏各个像素单元开闭的电流频率与所述点焊机或所述弧焊机的焊接电流频率相同,电流相位相差90度。
7.在其中一个实施例中,所述滑块小车上还设置有摄像头安装臂;所述摄像头安装
臂上固定连接第二摄像头;所述第二摄像头用于获取工件上准备焊接位置的坐标位置。
8.在其中一个实施例中,所述半圆环形轨道上还设置有摄像头安装臂;所述摄像头安装臂上固定连接第二摄像头;所述第二摄像头用于获取工件上准备焊接位置的坐标位置。
9.在其中一个实施例中,所述滑块小车上还设置有第二柔性安装臂;所述第二柔性安装臂的末端固定设置有过线环;所述过线环用于对所述机械臂、或所述点焊机、所述弧焊机、或所述第一摄像头的电源线进行限位。
10.在其中一个实施例中,所述半圆环形轨道上还设置有第二柔性安装臂;所述第二柔性安装臂的末端固定设置有过线环;所述过线环用于对所述机械臂、或所述点焊机、所述弧焊机、或所述第一摄像头的电源线进行限位。
11.在其中一个实施例中,所述机械臂为三轴机械臂、或四轴机械臂、或五轴机械臂、或六轴机械臂。
12.在其中一个实施例中,所述机械臂的末端旋转轴上设置有伺服变位装置;所述点焊机和所述弧焊机与所述伺服变位装置固定连接;所述伺服变位装置用于切换使用所述点焊机和所述弧焊机。
13.在其中一个实施例中,所述半圆环形轨道的两端设置有安装连接板,以便于所述半圆环形轨道的安装和固定;所述安装连接板垂直于所述半圆环形轨道的圆环面设置。
14.在其中一个实施例中,所述滑块小车上还设置有锁紧装置;所述锁紧装置用于当所述滑块小车位置调整好后将所述滑块小车锁紧在所述半圆环形轨道上。
15.上述提供的基于机器视觉的点弧焊一体机,通过设置一半圆环形轨道,轨道内设置同圆心的半圆环形齿条,并设置与半圆环形轨道滑动连接的滑块小车,且小车上设置驱动齿轮与半圆环形齿条通过轮齿啮合连接,从而通过所述驱动齿轮的转动带动所述滑块小车在所述半圆环形轨道上滑动。同时,在滑块小车上设置有多关节机械臂,机械臂的末端旋转轴上设置点焊机和弧焊机,以通过控制机械臂各个旋转轴的转动来选择使用点焊机或弧焊机。此外,在机械臂的末端旋转轴上还设置有第一柔性安装臂,其末端设置第一摄像头、第一摄像头的镜头前端设置有液晶屏,通过调节第一柔性安装臂使第一摄像头始终对准点焊机或弧焊机的焊接头,即使点焊机或弧焊机的焊接头始终落在第一摄像头的拍摄范围内;在工作过程中,使驱动液晶屏各个像素单元开闭的电流频率与点焊机或弧焊机的焊接电流频率相同,相位相反或相差90度,使得第一摄像头能够拍摄到点焊机或弧焊机上一个电流脉冲焊接后的画面,从而避开焊接时的爆光影响,精准获取工件上待焊位置坐标、焊点及焊缝的画面。如此设置,不仅焊接精度高、效率高,且无需过多的人工参与,更安全。此外,该点弧焊一体机结构简单,易于实现。
附图说明
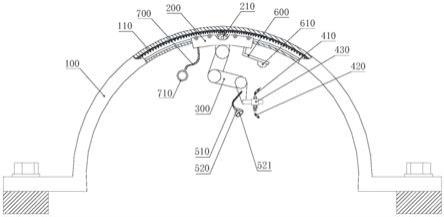
16.图1为一实施例提供的基于机器视觉的点弧焊一体机基本结构示意图。
17.附图标记说明:100.半圆环形轨道;110.半圆环形齿条;200.滑块小车;210.驱动齿轮;300.机械臂;410.点焊机;420.弧焊机;430.伺服变位装置;510.第一柔性安装臂;520.第一摄像头;521.液晶屏;600.摄像头安装臂;610.第二摄像头;700.第二柔性安装臂;710.过线环。
具体实施方式
18.在本专利文件中,下面讨论的图1和用于描述本公开的原理或方法的各种实施例只用于说明,而不应以任何方式解释为限制了本公开的范围。参考附图,本公开的优选实施例将在下文中描述。在下面的描述中,将省略众所周知的功能或配置的详细描述,以免以不必要的细节混淆本公开的主题。而且,本文中使用的术语将根据本实用新型的功能定义。因此,所述术语可能会根据用户或操作者的意向或用法而不同。因此,本文中使用的术语必须基于本文中所作的描述来理解。
19.一种基于机器视觉的点弧焊一体机,如图1所示,包括半圆环形轨道100、与半圆环形轨道100滑动连接的滑块小车200。半圆环形轨道100上固定设置有半圆环形齿条110,半圆环形齿条110的圆心与半圆环形轨道100的圆心相同。滑块小车200上设置有驱动齿轮210,驱动齿轮210与半圆环形齿条110通过轮齿啮合连接,驱动齿轮210与驱动电机连接,以通过驱动齿轮210的转动带动滑块小车200在半圆环形轨道100上滑动。滑块小车200上还设置有多关节机械臂300,机械臂300的末端旋转轴上设置有点焊机410和弧焊机420,以通过控制机械臂300各个旋转轴的转动来选择使用点焊机410或弧焊机420。机械臂300的末端旋转轴上还设置有第一柔性安装臂510,第一柔性安装臂510的末端设置有第一摄像头520、第一摄像头520的镜头前端设置有液晶屏521,通过调节第一柔性安装臂510使第一摄像头520始终对准点焊机410或弧焊机420的焊接头,即使点焊机410或弧焊机420的焊接头始终落在第一摄像头520的拍摄范围内。在工作过程中,驱动液晶屏521各个像素单元开闭的电流频率与点焊机410或弧焊机420的焊接电流频率相同,电流相位相差180度,即驱动电流的相位相反。液晶屏521用于屏蔽点焊机410或弧焊机420焊接时的亮斑。第一摄像头520用于获取焊接过程中工件上待焊位置坐标、焊点及焊缝的画面。
20.在其中一个实施例中,驱动液晶屏521各个像素单元开闭的电流频率与点焊机410或弧焊机420的焊接电流频率相同,电流相位相差90度。
21.在其中一个实施例中,如图1所示,滑块小车200上还设置有摄像头安装臂600。摄像头安装臂600上固定连接第二摄像头610。第二摄像头610用于获取工件上准备焊接位置的坐标位置。
22.在其中一个实施例中,如图1所示,半圆环形轨道100上还设置有摄像头安装臂600。摄像头安装臂600上固定连接第二摄像头610。第二摄像头610用于获取工件上准备焊接位置的坐标位置。
23.在其中一个实施例中,如图1所示,滑块小车200上还设置有第二柔性安装臂700。第二柔性安装臂700的末端固定设置有过线环710。过线环710用于对机械臂300、或点焊机410、弧焊机420、或第一摄像头520的电源线进行限位。
24.在其中一个实施例中,如图1所示,半圆环形轨道100上还设置有第二柔性安装臂700。第二柔性安装臂700的末端固定设置有过线环710。过线环710用于对机械臂300、或点焊机410、弧焊机420、或第一摄像头520的电源线进行限位。
25.在其中一个实施例中,机械臂300为三轴机械臂。
26.在其中一个实施例中,机械臂300为四轴机械臂。
27.在其中一个实施例中,机械臂300为五轴机械臂。
28.在其中一个实施例中,机械臂300为六轴机械臂。
29.在其中一个实施例中,如图1所示,机械臂300的末端旋转轴上设置有伺服变位装置430。点焊机410和弧焊机420与伺服变位装置430固定连接。伺服变位装置430用于切换使用点焊机410和弧焊机420。
30.在其中一个实施例中,如图1所示,半圆环形轨道100的两端设置有安装连接板(图中未标示),以便于半圆环形轨道100的安装和固定。安装连接板垂直于半圆环形轨道100的圆环面设置。
31.在其中一个实施例中,滑块小车200上还设置有锁紧装置(图中未画出)。锁紧装置用于当滑块小车200位置调整好后将滑块小车200锁紧在半圆环形轨道100上。
32.上述提供的基于机器视觉的点弧焊一体机,通过设置一半圆环形轨道100,轨道内设置同圆心的半圆环形齿条110,并设置与半圆环形轨道100滑动连接的滑块小车200,且小车上设置驱动齿轮210与半圆环形齿条110通过轮齿啮合连接,从而通过驱动齿轮210的转动带动滑块小车200在半圆环形轨道100上滑动。同时,在滑块小车200上设置有多关节机械臂300,机械臂300的末端旋转轴上设置点焊机410和弧焊机420,以通过控制机械臂300各个旋转轴的转动来选择使用点焊机410或弧焊机420。此外,在机械臂300的末端旋转轴上还设置有第一柔性安装臂510,其末端设置第一摄像头520、第一摄像头520的镜头前端设置有液晶屏521,通过调节第一柔性安装臂510使第一摄像头520始终对准点焊机410或弧焊机420的焊接头,即使点焊机410或弧焊机420的焊接头始终落在第一摄像头520的拍摄范围内。在工作过程中,使驱动液晶屏521各个像素单元开闭的电流频率与点焊机410或弧焊机420的焊接电流频率相同,相位相反或相差90度,使得第一摄像头520能够拍摄到点焊机410或弧焊机420上一个电流脉冲焊接后的画面,从而避开焊接时的爆光影响,精准获取工件上待焊位置坐标、焊点及焊缝的画面。如此设置,不仅焊接精度高、效率高,且无需过多的人工参与,更安全。此外,该点弧焊一体机结构简单,易于实现。
33.以上实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1