一种叠瓦电池串汇流条焊接装置的制作方法
1.本实用新型涉及光伏组件生产技术领域,具体为一种叠瓦电池串汇流条焊接装置。
背景技术:
2.目前本领域内的电池串汇流条焊接装置多是采用热辐射加热焊接方式来实现叠瓦电池串汇流条的焊接作业,其主要是通过具有挥发性的助焊剂并采用红外灯照射加热的方式来将汇流条焊接于电池片上,其不仅具有焊接不良率高、能耗高的问题,而且由于助焊剂对机器设备、电池片以及周围环境都会造成较重的污染,故其还存在高污染的问题。
技术实现要素:
3.针对上述问题,本实用新型提供了一种叠瓦电池串汇流条焊接装置,其能解决传统采用热辐射加热焊接装置的焊接方式存在的焊接不良率高、高能耗、高污染的问题。
4.一种叠瓦电池串汇流条焊接装置,其特征在于:其包括
5.直线传送带机构,所述直线传送带机构沿输送方向依次设有上料涂装段和加热下料段;
6.上料机构,用于将待焊接的电池片、焊带输送至直线传送带机构的上料涂装段;
7.导电胶涂装机构,设置于所述直线传送带机构的上料涂装段的一外侧,用于对位于直线传送带机构的上料涂装段上的电池片涂装导电胶;
8.压紧加热机构,设置于所述直线传送带机构加热下料段的一外侧,用于将待焊接的焊带与已涂装有导电胶的电池片压紧并加热;
9.下料机构,用于将焊接完成的电池片与焊带整体运离直线传送带机构。
10.进一步的,所述导电胶涂装机构为点胶机构,点胶机构包括第一支撑梁架与点胶组件,所述第一支撑梁架设置于所述直线传送带机构的上料涂装段连接加热下料段一侧的上方,所述第一支撑梁架上安装有与直线传送带机构的传输方向垂直的第一直线平移模组,所述点胶组件通过调节组件安装于所述第一支撑梁架的第一直线平移模组上,所述调节组件包括第一升降气缸单元,所述点胶组件通过所述第一升降气缸单元安装于所述支撑梁的第一直线平移模组上。
11.进一步的,所述调节组件还包括水平气缸单元,所述点胶组件安装于所述水平气缸单元上,所述水平气缸单元安装于所述第一升降气缸单元,所述第一升降气缸单元通过气缸固定板安装于所述第一支撑梁架的第一直线平移模组上,所述水平气缸单元的导杆与所述直线传送带机构的输送方向平行。
12.进一步的,所述导电胶涂装机构为印刷涂覆机,所述印刷涂覆机架设于设置于所述直线传送带机构的上料涂装段连接加热下料段一侧的上方。
13.进一步的,所述压紧加热机构设置于所述直线传送带机构加热下料段的上方,其包括下压驱动组件和压板,所述压板连接于所述下压驱动组件上,所述压板内安装有加热
棒,所述下压驱动组件驱动所述压板竖向下移;所述下压驱动组件优选下压气缸,所述下压气缸的导杆竖向朝下并通过转接支架与压板连接。
14.进一步的,所述直线传送带机构包括皮带线组件和第一真空吸附组件,所述皮带线组件包括绕装于主动辊和从动辊外部的环形传输皮带,所述环形传输皮带上均布开设有吸附孔,所述第一真空吸附组件设置于环形传输皮带内且沿着直线传送带机构的传输方向依次水平设置。
15.更进一步的,位于所述直线传送带机构的加热下料段的第一真空吸附组件内还安装有加热棒。
16.进一步的,其还包括视觉定位检测机构,所述视觉定位检测机构包括真空吸附定位平台和第一定位相机,所述真空吸附定位平台设置于所述直线传送带机构的上料涂装段的一外侧端,所述第一定位相机设置于所述真空吸附定位平台上方。
17.更进一步的,所述视觉定位检测机构还包括第二定位相机,所述第二定位相机设置于所述直线传送带机构的加热上料区的上方并位于所述导电胶涂装机构与压紧加热机构之间。
18.进一步的,所述上料机构、下料机构均包括料盒输送组件、直线输送组件和第二真空吸附组件,所述第二真空吸附组件安装于所述直线输送组件上,所述直线输送组件带动所述第二真空吸附级件直线移动,所述料盒输送组件用于将料盒输送至第二直空吸附组件的下方,所述第二真空吸附组件用于吸附待焊接的电池片或焊带或已经焊接完成的电池片与焊带的整体成品;
19.所述料盒输送组件包括料盒输送架、料盒承载板和料盒输送电机,所述料盒承载板上设置有用于堆叠层叠待焊接的电池片或焊带或已焊接成一体的电池片与焊带的成品的料盒,所述料盒输送架包括底板,所述底板上平行地设置两条直线导轨,所述料盒承载板滑动安装于所述两条直线导轨上,所述料盒输送电机的输出端连接一同步带单元,所述料盒承载板安装有一连接件,所述连接件与所述同步带单元的同步带固接;
20.所述料盒输送组件还包括一顶料单元,所述底板、料盒承载板、以及料盒分别开设有竖向贯通的避让空腔,所述顶料单元包括顶料电缸和顶料板,所述顶料电缸通过电缸固定座安装于所述底板的底部,所述顶料板固装于顶料板固定座,所述顶料电缸的推动端竖向朝上并穿过所述底板的避让空腔后与所述顶料板固定座固接,所述顶料电缸的驱动端连接顶料驱动电机;
21.所述直线输送组件包括第二支撑梁架,所述第二支撑梁架上安装有第二直线模组,所述第二真空吸附组件安装于所述第二直线模组上;
22.所述第二真空吸附组件包括真空吸盘、吸盘固定架和第二升降气缸单元,所述真空吸盘固装于所述吸盘固定架的底部,所述吸盘固定架通过连接支架与所述第二升降气缸单元连接,所述第二升降气缸单元通过气缸连接板与所述第二直线模组连接。
23.进一步的,所述上料机构的料盒输送组件设有两组,分别为用于输送装载有待焊接电池片的料盒的电池片料盒输送组件和用于输送装载有待焊接焊带的料盒的焊带料盒输送组件;所述上料机构的第二真空吸附组件设有两组,分别为与电池片料盒输送组件、焊带料盒输送组件一一对应的电池片真空吸附组件和焊带真空吸附组件;所述电池片料盒输送组件、焊带料盒输送组件并排平行地设置于所述真空吸附定位平台的一侧;所述上料机
构的直线输送组件的第二支撑梁架设置于所述真空吸附定位平台、电池片料盒输送组件、焊带料盒输送组件的上方,所述电池片真空吸附组件、焊带真空吸附组件的第二升降气缸单元安装于同一所述气缸连接板,且该气缸连接板与所述第二直线模组连接。
24.进一步的,所述上料机构还包括一机械手抓取转运组件,所述机械手抓取转运组件包括设置于所述直线传送带机构的上料涂装段的进料端外侧的机械手单元,所述机械手单元的执行端安装有第三真空吸附组件,所述第三真空吸附组件能所述真空吸附定位平台上的待焊接的电池片或焊带并在所述机械手单元的带动下放置至所述直线传送带机构的上料涂装段上。
25.进一步的,所述上料机构还包括焊带上料组件,所述焊带上料组件包括焊带拉丝模组、焊带冲压切丝模组以及焊带搬丝模组,原料焊带经由焊带拉丝模组压平拉直后由焊带冲压切丝模组冲压切断、再由焊带搬丝模组将切断后的焊带移动至导电胶涂装机构与压紧加热机构之间的直线传送带机构上。
26.本实用新型的一种叠瓦电池串汇流条焊接装置的有益效果在于:其通过导电胶涂胶装置直接在电池片上涂装导电胶、再将焊带放置于电池片的导电胶上使得焊带与电池片之间通过导电胶粘接、最后再通过压紧加热机构对由导电胶粘接的焊带、电池片整体进行加热以使导电胶固化从而完成焊带与电池片的焊接连接,本实用新型装置以热传导焊接的方式取代了现有热辐射加热焊接的方式,其不仅能耗低,尤其是本实用新型装置中的压紧加热机构整体加热采用了压紧加热机构与底部加热组件一同加热的热传导加热方式能够有效避免虚焊不良的问题,从而提高焊接质量、使其导电性更为优良、电池片与焊带的粘接强度也更高;另外本实用新型装置中使用的热传导加热焊接方式不再如传统热辐射加热焊接过程一般需要使用助焊剂,因而也避免了使用助焊剂带来的对设备、电池片、以及环境的污染问题,符合当前日益提高的环保要求。
附图说明
27.图1为本实用新型一种叠瓦电池串汇流条焊接装置的实施例一的俯视向结构示意图;
28.图2为本实用新型一种叠瓦电池串汇流条焊接装置的实施例一的第一视向的立体示意图;
29.图3为本实用新型一种叠瓦电池串汇流条焊接装置的实施例一的第二视向的立体示意图;
30.图4为本实用新型一种叠瓦电池串汇流条焊接装置的实施例一中点胶机构的结构示意图;
31.图5为本实用新型一种叠瓦电池串汇流条焊接装置的实施例一中压紧加热机构的结构示意图;
32.图6为本实用新型一种叠瓦电池串汇流条焊接装置的实施例一中设置有加热棒的第一真空吸附组件的结构示意图;
33.图7为本实用新型一种叠瓦电池串汇流条焊接装置的实施例一中机械手抓取转运组件的结构示意图;
34.图8为本实用新型一种叠瓦电池串汇流条焊接装置的实施例一中的上料机构的结
构示意图;
35.图9为本实用新型焊接装置的实施例一中电池片料盒输送组件的放大示意图;
36.图10为图8中料盒输送组件的顶料单元的结构示意图;
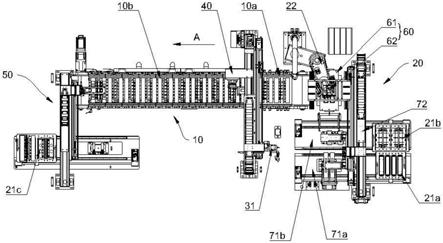
37.图11为本实用新型一种叠瓦电池串汇流条焊接装置的实施例四的立体示意图;
38.图12为本实用新型一种叠瓦电池串汇流条焊接装置的实施例四结构示意图。
39.附图标记:
40.10
‑
直线传送带机构,10a
‑
上料涂装段,10b
‑
加热下料段,11
‑
皮带线组件,12
‑
第一真空吸附组件,13
‑
环形传输皮带,14
‑
加热棒,15
‑
热电偶,a
‑
直线传送带机构的输送方向;
41.20
‑
上料机构,21a
‑
电池片料盒,21b
‑
焊带料盒,21c
‑
成品料盒,22
‑
机械手抓取转运组件, 221
‑
机械手单元,222
‑
第三真空吸附组件,222a
‑
电池片吸附单元,222b
‑
焊带吸附单元,223
‑ꢀ
顶板,224
‑
竖向直线导轨单元,225
‑
气缸单元,23
‑
焊带上料组件,231
‑
焊带拉丝模组,232
‑ꢀ
焊带冲压切丝模组,233
‑
焊带搬丝模组;
42.31
‑
点胶机构,311
‑
第一支撑梁架,312
‑
点胶组件,313
‑
第一直线平移模组,314
‑
第一升降气缸单元,315
‑
水平气缸单元,316
‑
擦胶组件,32
‑
印刷涂覆机;
43.40
‑
压紧加热机构,41
‑
下压气缸,42
‑
压板,43
‑
加热棒,44
‑
转接支架,45
‑
固定架;
44.50
‑
下料机构;
45.60
‑
视觉定位检测机构,61
‑
真空吸附定位平台,62
‑
第一定位相机,63
‑
第二定位相机;
46.71
‑
料盒输送组件,71a
‑
电池片料盒输送组件,71b
‑
焊带料盒输送组件,711
‑
料盒输送架, 711a
‑
底板,711b
‑
支板,711c
‑
直线导轨,712
‑
料盒承载板,713
‑
料盒输送电机,714
‑
同步带单元,715
‑
连接件,716
‑
顶料单元,716a
‑
顶料电缸,716b
‑
顶料板,716c
‑
电缸固定座,716d
‑ꢀ
顶料板固定座,716e
‑
顶料驱动电机,717
‑
风刀模组,72
‑
直线输送组件,721
‑
第二支撑梁架, 722
‑
第二直线模组,73
‑
第二真空吸附组件,73a
‑
电池片真空吸附组件,73b
‑
焊带真空吸附组件,731
‑
真空吸盘,732
‑
吸盘固定架,733
‑
第二升降气缸单元,734
‑
连接支架,735
‑
气缸连接板。
具体实施方式
47.实施例一:
48.本实用新型一种叠瓦电池串汇流条焊接装置,见图1~图3,其包括
49.直线传送带机构10,直线传送带机构10沿输送方向a依次设有上料涂装段10a和加热下料段10b;
50.上料机构20,用于将待焊接的电池片、焊带输送至直线传送带机构10的上料涂装段10a;
51.导电胶涂装机构,设置于直线传送带机构10的上料涂装段10a的一外侧,用于对位于直线传送带机构10的上料涂装段10a上的电池片涂装导电胶;
52.压紧加热机构40,设置于直线传送带机构10的加热下料段10b的一外侧,用于将待焊接的焊带与已涂装有导电胶的电池片压紧并加热;
53.下料机构50,用于将焊接完成的电池片与焊带整体运离直线传送带机构10。
54.本实施例中,导电胶涂装机构为点胶机构31,见图4,点胶机构31包括第一支撑梁
716d固接,顶料电缸716a的驱动端连接顶料驱动电机716e;
61.直线输送组件72包括第二支撑梁架721,见图8,第二支撑梁架721上安装有第二直线模组722,第二真空吸附组件73安装于第二直线模组722上,由此第二真空吸附组件73能在第二直线模组722的驱动下沿着第二支撑梁架721做直线平移,从而能够实现待焊接的电池片或焊带的上料、或已焊接完成的电池片与焊带整体的下料操作;
62.第二真空吸附组件73包括真空吸盘731、吸盘固定架732和第二升降气缸单元733,真空吸盘731固装于吸盘固定架732的底部,吸盘固定架732通过连接支架734与第二升降气缸单元733连接,第二升降气缸单元733通过气缸连接板735与第二直线模组722连接。。
63.本实施例中,上料机构20的料盒输送组件71设有两组,见图8,分别为用于输送装载有待焊接电池片的电池片料盒21a的电池片料盒输送组件71a和用于输送装载有待焊接焊带的焊带料盒21b的焊带料盒输送组件71b;并且上料机构20的第二真空吸附组件73也设有两组,分别为与电池片料盒输送组件71a、焊带料盒输送组件71b一一对应的电池片真空吸附组件73a和焊带真空吸附组件73b,同时电池片真空吸附组件73a、焊带真空吸附组件73b 的吸盘固定架732均设置有两个,即电池片与焊带均能一次性吸附两块,电池片料盒输送组件71a、焊带料盒输送组件71b并排平行地设置于真空吸附定位平台61的一侧;上料机构20 的直线输送组件72的第二支撑梁架721设置于真空吸附定位平台61、电池片料盒输送组件 71a、焊带料盒输送组件71b的上方,电池片真空吸附组件73a、焊带真空吸附组件73b的第二升降气缸单元733安装于同一气缸连接板735,且该气缸连接板735与第二直线模组722 连接。
64.上料机构20还包括一机械手抓取转运组件22,见图7,机械手抓取转运组件22包括设置于直线传送带机构10的上料涂装段10a的进料端外侧的机械手单元221,机械手单元221 的执行端安装有第三真空吸附组件222,第三真空吸附组件222能够吸附位于真空吸附定位平台61上的待焊接的电池片或焊带并在机械手单元221的带动下将吸附的电池片或焊带放置至直线传送带机构10的上料涂装段10a上;其中,第三真空吸附组件222包括专门用于吸附待焊接电池片的电池片吸附单元222a和专门用于吸附待焊接焊带的焊带吸附单元222b;机械手单元221的执行端固接有一顶板223,电池片吸附单元222a和焊带吸附单元222b各有两组且均安装于顶板223底面,其中两组焊带吸附单元222b分别通过竖向直线导轨单元224 可竖向升降地设置于两组电池片吸附单元222a的外侧,顶板223上设置有两个气缸单元225,气缸单元225的导杆朝下并穿过所述顶板223后与相应的一组焊带吸附单元222b连接。
65.本实施例的专用焊接装置的工作过程为:
66.待焊接的电池片层叠地放置于电池片料盒21a内,冲切好的待焊接的焊带层叠地放置于焊带料盒21b内,上料机构20的电池片料盒输送组件71a、焊带料盒输送组件71b分别将电池片料盒21a、焊带料盒21b输送至其直线输送组件72的第二支撑梁架721的下方,电池片真空吸附组件73a在其第二升降气缸单元733的驱动下向下伸入到电池片料盒21a内并吸附住一块待焊接的电池片,再在其第二升降气缸单元733的带动下上升,则将待焊接的电池片从电池片料盒21a内取出,再在第二直线模组722的驱动下整体平移至视觉定位检测机构60 的真空吸附定位平台61的上方并将吸附住的待焊接的电池片放置至真空吸附定位平台61上,第一定位相机62对吸附于真空吸附定位平台61上的待焊接的电池片进行拍照定位检
测,随后机械手抓取转运组件22的机械手单元221转动至真空吸附定位平台61上方,机械手单元 221的执行端的第三真空吸附组件222的电池片真空吸附单元222a将已拍照定位检测的电池片吸附,机械手单元221旋转并将电池片放置于直线传送带机构10的上料涂装段10a上并由皮带组件11内的第一真空吸附组件12吸附,且在放置的时候根据拍照定位检测的电池片的角度姿态信息对电池片的角度姿态进行调整;然后直线传送带机构10的皮带线组件11动作,将待焊接的电池片输送至点胶机构31的下方后停止输送,点胶机构31的第一升降气缸单元 314动作使其导杆推动水平气缸单元315以及点胶组件312整体竖直下降,直到点胶组件312 的点胶头接近待焊接电池片,然后第一直线平移模组313动作并带动第一升降气缸单元314、水平气缸单元315以及点胶组件312整体直线移动从而点胶组件312沿着待焊接电池片的栅线做直线移动,在此直线移动的过程中点胶组件312的点胶头对待焊接的电池片的栅线上进行导电胶的点涂;接着,水平气缸单元315动作并带动点胶组件312直线移动至直线传动带机构上相邻的下一块待焊接的电池片上方,第一直线平移模组313逆向动作并带动第一升降气缸单元314、水平气缸单元315以及点胶组件312整体逆向直线移动从而点胶组件312沿着待焊接电池片的栅线做直线移动,完成相邻电池片的导电胶点胶作业;而在进行导电胶的点涂过程中,上料机构20同步将待焊接的焊带的输送至真空吸附定位平台61上(此过程与电池片的上料过程相同),第一定位相机62对真空吸附定位平台61上的焊带进行拍照定位检测,随后机械手抓取转运组件22的机械手单元221将定位检测后的焊带吸附并根据焊带拍照定位检测的结果将焊带调整好上料位置后放置至已点涂好导电胶的电池片上并与电池片胶粘连接;此后,直线传送机构10动作将已通过导电胶粘接的电池片与焊带输送至其加热下料段 10b上并位于压紧加热机构40的压板42的下方,下压气缸41推动压板42下压,将已粘接的电池片与焊带压紧3秒~5秒,由于压板42内设置有加热棒43、以及皮带线组件11在加热下料段10b内的第一真空吸附组件12设置有加热棒14,因此在压紧的同时电池片与焊带受到来自上方压板42以及下部第一真空吸附组件12的热传导,从而导电胶迅速加热固化;此后,下压气缸41复位并带动压板42上移,皮带线组件11继续带动已焊接连接的电池片与焊带整体移动至下料端,在移动至下料端的过程中皮带线组件11内的第一真空吸附组件12 仍然持续地在下方进行加热,更加能保证的焊接固化的效果;最后,下料机构50将焊接完成的电池片与焊带整体吸附并放置至下料机构的成品料盒21c内。
67.实施例二:
68.本实施例与实施例一的区别在于,其点胶机构31中的调节组件仅包括第一升降气缸单元314,点胶组件312安装于第一升降气缸单元314上,第一升降气缸单元314通过气缸固定板安装于第一直线平移模组313上;本实施例的点胶机构31在对待焊接的电池片进行点胶作业时,第一升降气缸单元314动作从而带动点胶组件312的点胶头竖直下降至接近待焊接电池片的位置,直线传送带机构10的皮带线组件11动作带动待焊接电池片在点胶组件312的点胶头下方沿输送方向a直线移动,在此直线移动过程中点胶组件312的点胶头即对待焊接的电池片的栅线上进行导电胶的点涂作业。
69.实施例三:
70.本实施例与实施例一、实施例二的区别都在于,其导电胶涂装机构为印刷涂敷机32,其导电胶涂装机构为印刷涂覆机32,印刷涂覆机32架设于直线传送带机构10的上料涂装段10a 连接加热下料段10b一侧的上方。
71.实施例四:
72.本实施例与实施例三的区别主要在于上料机构20的不同,下面结合附图进行具体阐述:
73.见图11和图12,本实施例中的上料机构20仅包含一组用于输送装载有待焊接电池片的电池片料盒21a的电池片料盒输送组件71a,相应的其也仅包括一组用于吸附电池片料盒21a 内的待焊接电池片的电池片真空吸附组件73a;同时,本实施例中上料机构20还包括焊带上料组件23,焊带上料组件23包括焊带拉丝模组231、焊带冲压切丝模组232以及焊带搬丝模组233,原料焊带经由焊带拉丝模组231压平拉直后由焊带冲压切丝模组232冲压切断、再由焊带搬丝模组233将切断后的焊带移动至导电胶涂装机构与压紧加热机构40之间的直线传送带机构上;实施例中的导电胶涂装机构采用的印刷涂覆机32;本实施例中的焊带拉丝模组 231、焊带冲压切丝组232以及焊带搬丝模组233均为本技术领域的现有装置,在此不再赘述其具体结构。
74.本实施例中,由于待焊接的电池片与待焊接的焊带均各自单独上料,故其视觉定位检测机构60的真空吸附定位平台61、第一定位相机62仅能用于对待焊接的电池片上料前的定位检测,故本实施例中视觉定位检测机构60还包括第二定位相机63,第二定位相机63设置于直线传送带机构10的加热下料段10b的上方并位于印刷涂敷机32与压紧加热机构40之间;当印刷涂敷机32在待焊接的电池片的栅线上涂敷好导电胶后,第二定位相机63对涂敷好导电胶的电池片进行拍照定位检测,焊带搬丝模组233根据第二定位相机63对电池片的拍照定位检测结果将冲切好的焊带调整对应的位置后放置至电池片上,完成电池片与焊带的初步粘接。
75.本实用新型装置的上述实施例中,第一定位相机62除了对由真空吸附定位平台61吸附的电池片进行拍照定位检测,还能同时对电池片进行外观检测,若电池片外观检测达不合格,则机械手抓取转运组件22直接将外观检测不合格的电池片吸附后并转运到电池片废片台。
76.以上对本实用新型的具体实施进行了详细说明,但内容仅为本实用新型创造的较佳实施方案,不能被认为用于限定本实用新型创造的实施范围。凡依本实用新型创造申请范围所作的均等变化与改进等,均应仍归属于本实用新型的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1