一种六关节机器人的焊缝跟踪方法与流程
本发明涉及机器人焊接技术领域,尤其涉及一种六关节机器人的焊缝跟踪方法。
背景技术:
在焊缝跟踪应用场景中,焊缝路径中的点都是无规则离散的位置,六关节机器人在这些位置可以达到最大速度都是不一样的,无法用一个广泛的最大速度进行速度曲线规划。如果速度设置得过小了,则无法充分发挥机器人的性能,从而影响焊缝跟踪的速度。如果速度设置得过大了,则会使机器人跟踪丢步,影响焊缝跟踪的精度。因此,如何在焊缝跟踪的过程中合理进行速度曲线规划从而达到时间最优的效果,显得至关重要。
基于以上技术问题,文献1(中国专利号201910801058.9一种六自由度焊接机器人在线激光实时焊缝跟踪方法)和文献2(中国专利号202010006015.4一种6自由度机器人自适应焊缝轨迹的跟踪方法)对焊缝跟踪的传统方法步骤进行了描述,即利用视觉系统识别出焊缝的具体位置,然后将位置坐标发送给机器人,机器人根据发送的位置进行实时地跟踪焊接。
以上两个专利文献中传统的焊缝跟踪方法没有充分考虑机器人和伺服电机的最大速度性能,跟踪的速度较慢,跟踪时间较长。
技术实现要素:
本发明的目的在于提供一种六关节机器人的焊缝跟踪方法,以解决上述背景技术中遇到的问题。
为实现上述目的,本发明的技术方案如下:
一种六关节机器人的焊缝跟踪方法,包括以下步骤:
s1、手眼标定得到3d视觉系统和六关节机器人之间的坐标转换矩阵,坐标转换矩阵方程a为:
s2、利用3d视觉系统采集焊缝轨迹路径点的三维坐标离散数据集;设采集的点的个数为n,3d视觉系统对焊缝轨迹进行拍照并进行处理得出轨迹中各个路径点在视觉坐标系下的三维坐标记录为p1、p2、...、pn:
s3、计算六关节机器人坐标系下的焊缝轨迹路径的所述三维坐标离散数据集;设各路径点在机器人坐标系下的三维坐标为q1、q2、...、qn,则有:
只取矩阵的前三行,即:
同理可得:
s4、计算六关节机器人运动学中的速度的雅克比矩阵;
在焊缝跟踪过程中,机器人姿态保持不变为竖直向下,设各路径点处的雅克比矩阵为b1、b2、...,则有:
b1=[b11b12b13b14b15b16]
b2=[b21b22b23b24b25b26]
上述方程式中a1a2a3d4等表示的是机器人的连杆参数,θ11θ12θ13θ14θ15θ16等表示的是在第1个焊缝路径点处机器人的六个关节坐标,θ21θ22θ23θ24θ25θ26等表示的是在第2个焊缝路径点处机器人的六个关节坐标,……;
s5、查询六关节机器人各关节伺服电机的使用手册得到关节空间的最大速度离散集;
通过查询六关节机器人的各个关节伺服电机的手册,可以得到各个伺服电机的最大速度(单位为rpm)为vm1vm2vm3vm4vm5vm6,则关节空间的最大速度离散集vjmax(单位为rad/s)为:
上述方程式中k1k2k3k4k5k6等表示的是机器人各轴的减速比;
s6、计算六关节机器人笛卡尔空间所述最大速度离散集;
设各路径点处的关节空间速度矩阵为vj1、vj2、...,各路径点处的笛卡尔空间速度矩阵为v1、v2、...,则有:
上述方程式中vj11vj12vj13vj14vj15vj16等表示的是在第1个焊缝路径点处机器人关节空间的六个分速度,v11v12v13v14v15v16等表示的是在第1个焊缝路径点处机器人笛卡尔空间的六个分速度,v1合表示的是第1个焊缝路径点处机器人笛卡尔空间的合速度,b1-1表示的是矩阵b1的逆矩阵,vj21vj22vj23vj24vj25vj26等表示的是在第2个焊缝路径点处机器人关节空间的六个分速度,v21v22v23v24v25v26等表示的是在第2个焊缝路径点处机器人笛卡尔空间的六个分速度,v2合表示的是第2个焊缝路径点处机器人笛卡尔空间的合速度,b2-1表示的是矩阵b2的逆矩阵;
将式7、式8等代入式6,有:
上述方程式中abs表示的是绝对值,根据式9、式10等即可以求出笛卡尔空间最大速度离散集v1合v2合……
s7、对所述最大速度离散集进行曲线拟合得到最大速度连续集;
设各路径点到第1个焊缝路径点的距离为s1、s2、...,选择曲线v合=a*s5+b*s4+c*s3+d*s2+e*s+f对笛卡尔空间最大速度离散集进行曲线拟合,可以得到笛卡尔空间最大速度连续集,设矩阵方程式c、d为:
则系数矩阵为:
上述方程式中ct表示的是矩阵c的转置矩阵,(ct*c)-1表示矩阵ct和矩阵c乘积的逆矩阵;
s8、基于所述最大速度连续集进行速度曲线规划;将六关节机器人的各关节升速至常规运行速度,用于连接最大速度连续集的曲线,所有工作运行结束时,降速后停止。
上述方法中,步骤s4中,计算六关节机器人运动学中的速度为六关节机器人的运行速度、加速度中的任意一种。
上述方法中,步骤s6中,计算最大速度离散集时,关节空间的速度必须小于等于最大速度。
上述方法中,步骤s8中,速度曲线规划的方法包括以下步骤;
s81、将六关节机器人的各关节升速至常规运行速度;
s82、计算常规运行速度与初始点的距离s;
s83、计算距离s对应的最大速度;
s84、判断当前速度是否大于最大速度,若当前速度大于最大速度,则设为当前速度等于最大速度;若当前速度不大于最大速度,则将当前速度保持不变,来运行六关节机器人的各关节的速度;
s85、判断当前是否有剩余未规划路径,若还有剩余未规划路径,则返回至步骤s81继续执行;若当前没有剩余未规划路径,则降速后停止。
与现有技术相比,本发明的有益效果是:本发明提供一种基于机器人的最大速度前提条件限制下的时间最优焊缝跟踪方法,首先利用3d视觉相机系统对焊缝的所有路径点在相机坐标系下的三维坐标xyz离散数据集p(p1,p2,...pn)进行识别,然后利用相机和机器人的坐标转换矩阵a将p转化为机器人坐标系下的三维坐标离散数据集q(q1,q2,...,qn),再用机器人运动学雅克比矩阵将路径点集q的所有点的关节空间最大速度vjmax转化为笛卡尔空间最大速度离散数据集,接着再用曲线拟合的方法将最大速度离散数据集拟合成连续数据集,最后机器人基于最大速度连续集进行速度曲线规划。通过在焊缝跟踪的过程中合理进行速度曲线规划从而达到时间最优的效果,不同工作阶段设置不同的的速度或加速度,来提高六关节机器人的焊缝跟踪速度,节约工作时焊缝跟踪时间。
附图说明
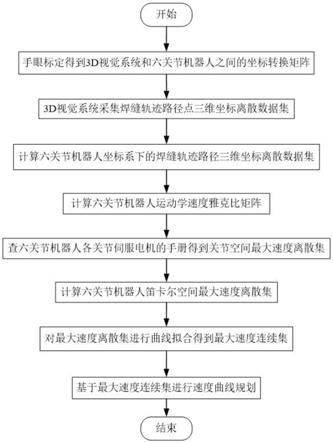
图1为本发明工作流程示意图;
图2为本发明中在实施时笛卡尔空间最大速度离散集示意图;
图3为本发明中在实施时笛卡尔空间最大速度连续集示意图;
图4为本发明中在实施时最终规划出的速度曲线示意图;
图5为本发明中在实施时最终规划出的速度曲线与现有技术的速度轨迹示意图;
图6为本发明中速度曲线规划流程示意图;
具体实施方式
下面结合附图和实施例对本发明的技术方案做进一步的详细说明。
如图1所示,一种六关节机器人的焊缝跟踪方法,包括以下步骤:
s1、手眼标定得到3d视觉系统和六关节机器人之间的坐标转换矩阵,坐标转换矩阵方程a为:
手眼标定是一项成熟的技术,不作为本专利的重点,这里只是直接应用其结果,不再进行详细描述。
接下来,以一个具体的实施例来说明其运算过程:
手眼标定得出的3d视觉系统到六关节机器人的坐标转换矩阵方程式a为:
s2、利用3d视觉系统采集焊缝轨迹路径点的三维坐标离散数据集;设采集的点的个数为n,3d视觉系统对焊缝轨迹进行拍照并进行处理得出轨迹中各个路径点在视觉坐标系下的三维坐标记录为p1、p2、...、pn:
根据步骤s1中坐标点为实施例获得采集焊缝点数据为:
s3、计算六关节机器人坐标系下的焊缝轨迹路径的所述三维坐标离散数据集;设各路径点在机器人坐标系下的三维坐标为q1、q2、...、qn,则有:
只取矩阵的前三行,即:
同理可得:
计算机器人坐标系下坐标,根据式1、式2,可以求得:
s4、计算六关节机器人运动学中的速度的雅克比矩阵;计算六关节机器人运动学中的雅克比矩阵为六关节机器人的运行速度、加速度中的任意一种或两种,这里以运动速度为例,从而确定其最优运行速度和最优加速度。本实施例主要是计算六关节机器人在工作时的运行速度,加速度可通过公式再进行详细计算。
机器人连杆参数(单位mm)
a1=200a2=620a3=138d4=653.15
机器人第1个焊缝路径点处机器人的六个关节坐标(单位°)
θ11=-7.13θ12=-4.01θ13=29.27θ14=0θ15=64.74θ16=-7.13
在焊缝跟踪过程中,机器人姿态保持不变为竖直向下,设各路径点处的雅克比矩阵为b1、b2、...,则有:
b1=[b11b12b13b14b15b16]
b2=[b21b22b23b24b25b26]
上述方程式中a1a2a3d4等表示的是机器人的连杆参数,θ11θ12θ13θ14θ15θ16等表示的是在第1个焊缝路径点处机器人的六个关节坐标,θ21θ22θ23θ24θ25θ26等表示的是在第2个焊缝路径点处机器人的六个关节坐标,……;
根据式4,可以求得雅克比矩阵:
s5、查询六关节机器人各关节伺服电机的使用手册得到关节空间的最大速度离散集;
通过查询六关节机器人的各个关节伺服电机的手册,可以得到各个伺服电机的最大速度(单位为rpm)为vm1vm2vm3vm4vm5vm6。
查询机器人的各个关节伺服电机的手册,可以得到(单位rpm)
vm1=2500vm2=2500vm3=3000vm4=3000vm5=3000vm6=3000
机器人各轴减速比
k1=121k2=121k3=121k4=124.615k5=161.6k6=73.143
则关节空间的最大速度离散集vjmax(单位为rad/s)为:
上述方程式中k1k2k3k4k5k6等表示的是机器人各轴的减速比;
根据式6,可以计算得到关节空间最大速度离散集(单位rad/s)
s6、计算六关节机器人笛卡尔空间所述最大速度离散集;
设各路径点处的关节空间速度矩阵为vj1、vj2、...,各路径点处的笛卡尔空间速度矩阵为v1、v2、...,则有:
上述方程式中vj11vj12vj13vj14vj15vj16等表示的是在第1个焊缝路径点处机器人关节空间的六个分速度,v11v12v13v14v15v16等表示的是在第1个焊缝路径点处机器人笛卡尔空间的六个分速度,v1合表示的是第1个焊缝路径点处机器人笛卡尔空间的合速度,b1-1表示的是矩阵b1的逆矩阵,vj21vj22vj23vj24vj25vj26等表示的是在第2个焊缝路径点处机器人关节空间的六个分速度,v21v22v23v24v25v26等表示的是在第2个焊缝路径点处机器人笛卡尔空间的六个分速度,v2合表示的是第2个焊缝路径点处机器人笛卡尔空间的合速度,b2-1表示的是矩阵b2的逆矩阵;
需要注意的是,计算最大速度离散集时,关节空间的速度必须小于等于最大速度。
将式7、式8等代入式6,有:
上述方程式中abs表示的是绝对值,根据式9、式10等即可以求出笛卡尔空间最大速度离散集v1合v2合……
根据式9,可以求得焊缝路径点1处的笛卡尔空间速度v1合<=1356mm/s
使用同样的方法,也可以求得其它的焊缝路径点笛卡尔空间最大速度,最终求得的各点最大速度如图2所示。
s7、对所述最大速度离散集进行曲线拟合得到最大速度连续集;
设各路径点到第1个焊缝路径点的距离为s1、s2、...,选择曲线v合=a*s5+b*s4+c*s3+d*s2+e*s+f对笛卡尔空间最大速度离散集进行曲线拟合,可以得到笛卡尔空间最大速度连续集,设矩阵方程式c、d为:
则系数矩阵为:
上述方程式中ct表示的是矩阵c的转置矩阵,(ct*c)-1表示矩阵ct和矩阵c乘积的逆矩阵;
根据式11、式12,对上一步的离散数据进行曲线拟合,可以得到笛卡尔空间最大速度连续集如图3所示。
s8、基于所述最大速度连续集进行速度曲线规划;将六关节机器人的各关节升速至常规运行速度,用于连接最大速度连续集的曲线,所有工作运行结束时,降速后停止。
请参阅图6,具体的:速度曲线规划的方法包括以下步骤;
s81、将六关节机器人的各关节升速至常规运行速度;
s82、计算常规运行速度与初始点的距离s;
s83、计算距离s对应的最大速度;
s84、判断当前速度是否大于最大速度,若当前速度大于最大速度,则设为当前速度等于最大速度;若当前速度不大于最大速度,则将当前速度保持不变,来运行六关节机器人的各关节的速度;
s85、判断当前是否有剩余未规划路径,若还有剩余未规划路径,则返回至步骤s81继续执行;若当前没有剩余未规划路径,则降速后停止。
基于上一步的最大速度曲线,最终规划出的速度曲线如图4所示。
本发明和现有技术比较,如图5所示。使用现有技术的方法,可以规划出如图5中的呈不规则曲线部分的速度曲线。从图5可以看到,本发明规划出的最大速度为1673mm/s,总时间为12.5s,而现有技术规划出的最大速度为759mm/s,总时间为15.3s。相比现有技术,本发明的最大速度更大,时间更优,效率更高。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式,并不用于限定本发明保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应含在本发明的保护范围之内。
- 还没有人留言评论。精彩留言会获得点赞!