一种铝单板激光切割系统及切割方法与流程
1.本发明涉及铝单板技术领域,尤其涉及一种铝单板激光切割系统及切割方法。
背景技术:
2.铝单板是指经过铬化等处理后,再采用氟碳喷涂技术,加工形成的建筑装饰材料,在铝单板的生产过程中,铝制的板材(板料)通常尺寸较大,需要按照铝单板成品的大小使用激光切割设备进行切割,现有激光切割设备对铝板材进行切割存在以下问题;
3.(1)切割过程中由于激光切口时会产生废料,切口处的废料容易粘连在支撑板上端面和两个侧面,从而影响物料放置在支撑板上方的水平度,并且在使用时支撑板两侧由于是清理死角,使得清理支撑板两侧面难度较大,长时间使用容易造成支撑板两侧废料堆积不平衡,在两侧高温废料冷却后,由于热胀冷缩的原理,会造成支撑板发生弯曲影响使用寿命;
4.(2)完成切割后由于铝单板从一块变成了多块,通常采取人工下料的方式将切割成品铝单板从料板上分离,随后再将料板从支撑板上搬下来,这个过程费时费力,并且具有一定危险性。
技术实现要素:
5.本发明的目的在于提供一种铝单板激光切割系统,其不仅结构简单,而且能够实现铝单板的传送以及对支撑板的清理。
6.为实现上述目的,本发明提供如下技术方案:一种铝单板激光切割系统,包括机架,所述机架的上端前侧固定设有沿左右方向设置的第一齿条、后侧固定设有沿左右方向设置的滑条;所述机架的上端在第一齿条和滑条之间沿左右方向滑动连接有门形架,所述门形架内设有与第一齿条配合用于驱动门形架沿前后方向运动的第一驱动组件;所述门形架的上端固定设有沿前后方向设置的第二齿条,所述门形架在第二齿条上沿前后方向滑动连接有滑动块,所述滑动块上设有用于切割的激光头,以及与第二齿条配合用于驱动滑动块前后运动的第二驱动组件;所述机架内设有传送组件,所述传动组件用于放置铝单板并能输送铝单板。
7.进一步的,所述第一驱动组件包括第一电机,所述第一电机固定安装在门形架内,所述第一电机的输出轴上固定设有与第一齿条啮合的第一齿轮。
8.进一步的,所述第二驱动组件包括第二电机,所述第二电机固定安装在滑动块上,所述第二电机的输出轴上固定设有与第二齿条啮合的第二齿轮。
9.进一步的,所述传送组件包括前动板和后动板,所述机架的前侧设有两个向下延伸的前凸板,两个前凸板上均铰接有前连杆,两个前连杆与前动板铰接,前动板、机架、两个前连杆之间组成平行四边形机构;所述机架的后侧设有两个向下延伸的后凸板,两个后凸板上均铰接有两个后连杆,两个后连杆与后动板铰接,后动板、机架、两个后连杆之间之间组成平行四边形机构;其中一个前凸板内转动连接有前铰接轴,所述前铰接轴的一端与前
连杆固定连接、另一端固定设有前一带轮;其中一个后凸板内转动连接有后铰接轴,所述后铰接轴的一端与后连杆固定连接、另一端固定设有后一带轮;
10.所述前动板的侧面自左向右并排设有多个竖直设置的前支撑板,所述前支撑板的后侧与后动板接触;所述后动板的侧面自左向右并排设有多个竖直设置的后支撑板,所述后支撑板的前侧与前动板接触;所述机架内设有用于驱动前一带轮和后一带轮同步转动的第三驱动组件,在前一带轮和后一带轮同步转动时,前动板和后动板在竖直方向上的运动相反;在前动板带动前支撑板向上运动时,后动板带动后支撑板向下运动,在前动板带动前支撑板向下运动时,后动板带动后支撑板向上运动。
11.进一步的,所述前支撑板的左右两侧沿竖直方向滑动连接有前刮板,所述后支撑板的前后两侧沿竖直方向滑动连接有后刮板;每个前支撑板的前后两侧均设有第一滑槽,前刮板的两端均设有滑动连接在第一滑槽内的第一凸柱,每个后支撑板的前后两侧均设有第二滑槽,后刮板的两端均设有滑动连接在第二滑槽内的第二凸柱;所述前动板的后侧设有多个与后刮板一一对应的前槽口,所述后动板的前侧设有多个与前刮板一一对应的后槽口。
12.进一步的,在前动板向上运动时,前动板推动后刮板的前端向上运动,在后刮板的前端运动至前槽口处时,后刮板在重力作用下沿后支撑板向下运动;在后动板向上运动时,后动板推动前刮板的后端向上运动,在前刮板的后端运动至后槽口处时,前刮板在重力作用下沿前支撑板向下运动;在前支撑板运动至最高位置时,后支撑板处于最低位置,前支撑板的下端与后支撑板的上端接触,在后支撑板运动至最高位置时,前支撑板处于最低位置,后支撑板的下端与前支撑板的上端接触。
13.进一步的,所述第三驱动组件包括双轴电机,所述双轴电机固定安装在机架的左端,所述双轴电机的前输出轴上固定设有前二带轮,所述双轴电机的后输出轴上固定设有后二带轮,所述前一带轮和前二带轮之间设有前传动带,所述后一带轮和后二带轮之间设有后传动带。
14.本发明还提供一种用上述的铝单板激光切割系统切割铝单板的方法,包括以下步骤:
15.s1、人工将待切割铝单板放置在前支撑板和/或后支撑板上方;
16.s2、通过电脑控制第一驱动组件和第二驱动组件,控制激光头运动路径,从而切割出成品尺寸铝单板;
17.s3、控制第三驱动组件带动前一带轮和后一带轮同步转动,前支撑板和后支撑板依次交替带动切割的铝单板向右输送;在前动板带动前支撑板向上运动时,前动板推动后刮板的前端向上运动,后刮板对后支撑板的左右两侧进行清洁;在后动板带动后支撑板向上运动时,后动板推动前刮板的后端向上运动,前刮板对前支撑板的左右两侧进行清洁;且在前支撑板运动至最高位置时,后支撑板处于最低位置,前支撑板的下端与后支撑板的上端接触,在后支撑板运动至最高位置时,前支撑板处于最低位置,后支撑板的下端与前支撑板的上端接触。
18.有益效果
19.与现有技术相比,本发明的技术方案具有以下优点:
20.1.通过双轴电机带动前支撑板和后支撑板依次进行平面运动,使前支撑板的上端
面和后支撑板板的下端面,以及后支撑板的上端面和前支撑板板的下端面相互刮擦,从而达到清除前支撑板和后支撑板的上表面废料的效果;
21.2.通过前支撑架上的前刮板和后动板的配合,使得前刮板能够对前支撑板的前后两侧进行清洁,同理通过后支撑架上的后刮板和前动板的配合,使得后刮板能够对后支撑板的前后两侧进行清洁,从而将黏连在前支撑板和后支撑板左右两侧面的废料清除,无需人工,自动清理;
22.3.通过双轴电机带动前支撑板和后支撑板依次进行平面运动,使物料能够自行下料,无需人工下料,提高切割效率;
23.4.双轴电机带动前支撑板和后支撑板进行下料的同时,带动后刮板和前刮板进行清洁动作,结构简单,无需单独清洁。
附图说明
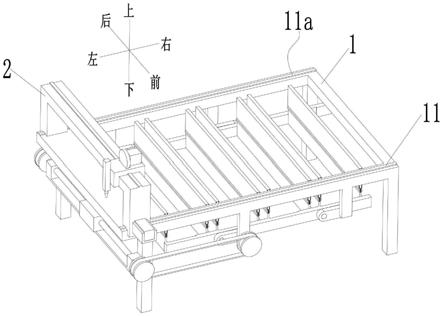
24.图1为本发明初始状态三维视图;
25.图2、3、4为本发明前支撑板以及后支撑板两侧废料清除状态三维视图;
26.图5为本发明前支撑板以及后支撑板端面废料清除状态俯视图;
27.图6为本发明图5中a
‑
a方向剖视图;
28.图7为本发明图2中i区域局部放大视图;
29.图8为本发明图3中ii区域局部放大视图;
30.图9为本发明图4中iii区域局部放大视图;
31.图10为本发明图6中iv区域局部放大视图;
32.图11为本发明门形架三维视图;
33.图12为本发明传送组件的部分结构三维视图。
具体实施方式
34.请参阅图1
‑
12所示,一种铝单板激光切割系统,包括机架1,所述机架1的上端前侧固定设有沿左右方向设置的第一齿条11、后侧固定设有沿左右方向设置的滑条11a;所述机架1的上端在第一齿条11和滑条11a之间沿左右方向滑动连接有门形架2,所述门形架2内设有与第一齿条11配合用于驱动门形架2沿前后方向运动的第一驱动组件;所述门形架2的上端固定设有沿前后方向设置的第二齿条23,所述门形架2在第二齿条23上沿前后方向滑动连接有滑动块3,所述滑动块3上设有用于切割的激光头33,以及与第二齿条23配合用于驱动滑动块3前后运动的第二驱动组件;所述机架1内设有传送组件,所述传动组件用于放置铝单板并能输送铝单板。
35.所述第一驱动组件包括第一电机21,所述第一电机21固定安装在门形架2内,所述第一电机21的输出轴上固定设有与第一齿条11啮合的第一齿轮22。所述第二驱动组件包括第二电机31,所述第二电机31固定安装在滑动块3上,所述第二电机31的输出轴上固定设有与第二齿条23啮合的第二齿轮32。
36.所述传送组件包括前动板6和后动板6a,所述机架1的前侧设有两个向下延伸的前凸板1a,两个前凸板1a上均铰接有前连杆7,两个前连杆7与前动板6铰接,前动板6、机架1、两个前连杆7之间组成平行四边形机构;所述机架1的后侧设有两个向下延伸的后凸板1b,
两个后凸板1b上均铰接有两个后连杆7a,两个后连杆7a与后动板6a铰接,后动板6a、机架1、两个后连杆7a之间之间组成平行四边形机构;其中一个前凸板1a内转动连接有前铰接轴(图中均未示出),所述前铰接轴(图中均未示出)的一端与前连杆7固定连接、另一端固定设有前一带轮42;其中一个后凸板1b内转动连接有后铰接轴(图中均未示出),所述后铰接轴的一端与后连杆7a固定连接、另一端固定设有后一带轮42a;所述前动板6的侧面自左向右并排设有多个竖直设置的前支撑板61,所述前支撑板61的后侧与后动板6a接触;所述后动板6a的侧面自左向右并排设有多个竖直设置的后支撑板61a,所述后支撑板61a的前侧与前动板6接触;所述机架1内设有用于驱动前一带轮42和后一带轮42a同步转动的第三驱动组件,在前一带轮42和后一带轮42a同步转动时,前动板6和后动板6a在竖直方向上的运动相反;在前动板6带动前支撑板61向上运动时,后动板6a带动后支撑板61a向下运动,在前动板6带动前支撑板61向下运动时,后动板6a带动后支撑板61a向上运动。
37.所述前支撑板61的左右两侧沿竖直方向滑动连接有前刮板62,所述后支撑板61a的前后两侧沿竖直方向滑动连接有后刮板62a;每个前支撑板61的前后两侧均设有第一滑槽611,前刮板62的两端均设有滑动连接在第一滑槽611内的第一凸柱621,每个后支撑板61a的前后两侧均设有第二滑槽611a,后刮板62a的两端均设有滑动连接在第二滑槽611a内的第二凸柱621a;所述前动板6的后侧设有多个与后刮板62a一一对应的前槽口63,所述后动板6a的前侧设有多个与前刮板62一一对应的后槽口63a。在前动板6向上运动时,前动板6推动后刮板62a的前端向上运动,在后刮板62a的前端运动至前槽口63处时,后刮板62a在重力作用下沿后支撑板61a向下运动;在后动板6a向上运动时,后动板6a推动前刮板62的后端向上运动,在前刮板62的后端运动至后槽口63a处时,前刮板62在重力作用下沿前支撑板61向下运动;在前支撑板61运动至最高位置时,后支撑板61a处于最低位置,前支撑板61的下端与后支撑板61a的上端接触,在后支撑板61a运动至最高位置时,前支撑板61处于最低位置,后支撑板61a的下端与前支撑板61的上端接触。
38.所述第三驱动组件包括双轴电机12,所述双轴电机12固定安装在机架1的左端,所述双轴电机12的前输出轴上固定设有前二带轮4,所述双轴电机12的后输出轴上固定设有后二带轮4a,所述前一带轮42和前二带轮4之间设有前传动带41,所述后一带轮42a和后二带轮4a之间设有后传动带41a。
39.本发明还提供一种用上述的铝单板激光切割系统切割铝单板的方法,包括以下步骤:
40.s1、人工将待切割铝单板放置在前支撑板61和/或后支撑板61a上方;
41.s2、通过电脑控制第一驱动组件和第二驱动组件,控制激光头33运动路径,从而切割出成品尺寸铝单板;
42.s3、控制第三驱动组件带动前一带轮42和后一带轮42a同步转动,前支撑板61和后支撑板61a依次交替带动切割的铝单板向右输送;在前动板6带动前支撑板61向上运动时,前动板6推动后刮板62a的前端向上运动,后刮板62a对后支撑板61a的左右两侧进行清洁;在后动板6a带动后支撑板61a向上运动时,后动板6a推动前刮板62的后端向上运动,前刮板62对前支撑板61的左右两侧进行清洁;且在前支撑板61运动至最高位置时,后支撑板61a处于最低位置,前支撑板61的下端与后支撑板61a的上端接触,在后支撑板61a运动至最高位置时,前支撑板61处于最低位置,后支撑板61a的下端与前支撑板61的上端接触。
43.上述s2中,第一驱动组件工作时,第一电机21带动第一齿轮22转动,由于第一电机21固定安装在门形架2上,第一齿条11固定安装在机体上,因此第一齿轮22转动时通过第一电机21带动门形架2左右运动。第二驱动组件工作时,第二电机31带动第二齿轮32转动,由于第二电机31固定安装在滑动块3上,第二齿条23固定安装在门型架上,因此第二齿轮32转动时通过第二电机31带动滑动块3前后运动。
44.上述s3中,传送组件工作时,双轴电机12带动前二带轮4和后二带轮4a同步转动,前二带轮4通过前传动带41带动前一带轮42转动,后二带轮4a通过后传动带41a带动后一带轮42a转动;前一带轮42转动时通过前铰接轴带动前连杆7转动,进而带动前动板6运动,同理后一带轮42a转动时通过后铰接轴带动后连杆7a转动,进而带动后动板6a运动,在竖直方向上,前动板6和后动板6a的运动方向相反。本实施例中,在前动板6带动前支撑板61运动时,一方面通过前支撑板61带动铝单板向右运动,另一方面通过后刮板62a的前端带动后刮板62a沿第二滑槽611a向上运动,对后支撑板61a的左右两侧面进行刮除清洁,且在前动板6运动至最高位置时,前支撑板61的下端对后支撑板61a的上端面进行刮除清洁;另外,在后刮板62a运动至前槽口63处时,后刮板62a在重力作用下向下运动。同理,在后动板6a带动后支撑板61a运动时,一方面通过后支撑板61a带动铝单板向右运动,另一方面通过前刮板62的后端带动前刮板62沿第一滑槽611向上运动,对前支撑板61的左右两侧面进行刮除清洁,且在后动板6a运动至最高位置时,后支撑板61a的下端对前支撑板61的上端面进行刮除清洁;另外,在前刮板62运动至后槽口63a处时,前刮板62在重力作用下向下运动。
45.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1