用于监控激光焊接过程的孔隙缺陷的方法和加工机器与流程
1.本发明涉及一种用于监控激光焊接过程的方法,该激光焊接过程用于借助于激光射束焊接由金属材料、尤其由铜或铝制成的两个工件、优选棒状导体,该方法尤其用于监控多个相同的激光焊接过程,所述多个相同的激光焊接过程用于分别以激光射束的相同的激光功率和相同的焊接持续时间焊接两个相同的工件,其中,在焊接两个工件时,激光射束对准工件的并排布置的端面,以便在两个端面上熔化熔珠,该熔珠随后凝固成焊珠。优选地,加工激光射束所对准的工件端面并排布置在相同高度上。本发明还涉及一种适合于执行该方法的加工机器和一种所属的计算机程序产品。
背景技术:
2.在激光焊接中典型的缺陷是形成孔隙,所述孔隙降低了焊接的功能。通常从外部不能识别出在焊缝或者焊珠中是否已形成孔隙。只有通过破坏性的检验或通过计算机断层造影(ct)或x光技术才能事后检验是否形成有缺陷的连接。因此,在通常情况下由工人进行目视检查,或者周期性地通过ct或x光技术对样本进行分析评价。
3.含铜的弯曲的棒状导体、尤其是所谓的发夹(hairpin)被安装在电子动力机器中,例如电动机或发电机。棒状导体相应于所设置的电布线来布置并且彼此焊接,以便由此构建电磁体。在此,电动机通常具有数十个、通常数百个弯曲的棒状导体,这些棒状导体必须成对地彼此焊接。在此重要的是,借助于焊接提供足够的横截面面积(“附接面”),通过该横截面面积,电流可以从一个棒状导体流到另一棒状导体中。如果附接面太小,则在运行中将面临明显的电阻加热、效率损失或甚至电子动力机器不可用。
4.棒状导体的焊接借助于激光射束实现,激光射束为此通常对准两个并排布置的、大多彼此贴靠的棒状导体的端侧端面。这些端面被引入的热量熔化并且在凝固之后通过再次凝固的焊珠彼此连接。通常,激光射束总是以相同的功率在相同的时间上对准这些棒状导体,由此实现足够大的附接面。
5.然而,由于棒状导体的表面上的污物或粗糙度,棒状导体对于激光射束的反射率可能波动,并且由此实际的能量输入也可能波动。同样,由于棒状导体的错误定位、例如间隙或偏移,或者由于激光射束的不精确的定位,实际的能量输入可能变化。在能量输入过小时熔化过少的材料,从而产生过小的焊珠,该焊珠提供过小的附接面。在激光焊接中形成强烈飞溅的情况下,也可能产生具有过小的附接面的过小的焊珠。
6.特别地,在以数百个焊接部将棒状导体焊接在仅一个构件(电动机定子)上的情况下,由于形成孔隙而出现的焊接缺陷在其统计学总体上是有问题的。特别地,通常在大量的熔体以飞溅物的形式从过程区域中抛出时会出现大的孔隙,所述大的孔隙后续干扰棒状导体中的电流的功能。由于在仅一个构件上的大量焊接部,目视检查和对样品的分析评价都不能足够地提供以低废品率生产的可靠性。因此,例如在接受带有五百个焊接部的定子的例如为十万分之一的功能失效率的情况下,五千万个焊接部中仅允许一个焊接部有缺陷。为此,100%地检查和监控焊接过程是必不可少的。
7.例如,从de 10 2004 016 669 b3中已知一种用于检查焊缝的方法,该焊缝借助于激光射束焊接引入一个或多个工件中。在此,从焊缝的区域借助于传感器接收特征信号并且将其与应有值进行比较,其中,仅考虑在激光射束焊接之后的、最早在焊缝固化之后开始的特征时间间隔内接收到的信号。
技术实现要素:
8.本发明的任务在于,提供一种用于监控激光焊接过程、尤其是多个相同的激光焊接过程的方法,所述激光焊接过程用于分别焊接两个工件,该方法可以简单、快速且无损地执行。
9.该任务在开头所述的监控方法中根据本发明通过以下方式解决:在焊接两个工件时确定从关断激光射束直至熔珠凝固为止的凝固持续时间,将所确定的凝固持续时间与针对无孔隙缺陷的焊接预给定的应有凝固持续时间进行比较,并且当所确定的凝固持续时间少于预给定的应有凝固持续时间时,将凝固的焊珠分类为有缺陷(“存在孔隙缺陷”)。
10.在两个待连接的棒状导体的给定的端面横截面的情况下的焊接持续时间取决于可用的或所选择的焊接功率。如果限定了棒横截面和焊接功率,则在无孔隙缺陷的焊接的情况下得到限定的熔体体积。因为在实践中激光的作用时间、即焊接时间在重复焊接时不再改变,所以所有焊接事件具有相同的持续时间。在此实现了几毫秒的精度,这相当于典型地小于1%的时间偏差。这种处理方式保证了所有焊接的能量含量是相同的。由于待连接的棒状导体的质量和端面横截面也仅经受小的变化,在熔融的焊接区域冷却时,以在关断激光之后开始的始终相同的凝固持续时间得到重复精确的特性。
11.如果在焊接期间熔体从焊区被排出,则排出的熔体作用于冷却过程,使得与质量损失一起也出现焊区的能量损失。特别地,通常在大量的熔体以飞溅物的形式从过程区域中抛出时会出现大的孔隙,所述大的孔隙后续干扰棒状导体中的电流的功能。结果是,在凝固时,焊接区域的能量较少地流入到棒状导体的散热部中,从而在较短的时间内达到凝固温度。根据本发明,分析评价在关断激光器之后开始的凝固持续时间,并且在与应有凝固变化曲线有偏差的特性的情况下推断出焊接的定性状态(存在孔隙缺陷/不存在或仅不显著存在孔隙缺陷)。
12.特别优选地,从关断激光射束开始,借助于探测器、尤其是摄像机连续地拍摄熔珠的位置分辨的数字图像,并且由位置分辨的探测器图像产生强度等级像素图像、尤其是灰度像素图像。熔体或者说熔珠是否还处于液态状态的信息包含在单个图像的强度值或灰度值的标度中。随着熔珠的温度逐渐降低,灰度值从亮到暗变化。优选地,这些图像分别在一图像局部中、尤其在围绕熔珠的中心点的一环形图像局部中被分析评价。
13.在一种优选的方法变型中,针对每个像素图像求取在该像素图像的所有像素上取平均的强度等级值,并且基于该取平均的强度等级值的时间变化曲线确定凝固持续时间。优选地,探测器图像分别仅在所拍摄图像的一图像局部(“感兴趣区域”(roi))中被分析评价。熔化区域或熔珠例如通过探测器来观察,并且从时间点“激光关断”开始评价在所谓的“感兴趣区域”(roi)中的强度值的发展。一种算法以时间增量评估冷却过程持续多长时间,该时间增量对应于探测器的帧率(frame rate)。
14.优选地,探测器图像以至少100hz、尤其至少1khz的拍摄频率被拍摄为过程视频。
15.对于被分类为有缺陷(“存在孔隙缺陷”)的焊珠的情况,自动地对该焊珠进行再焊接,或者触发其他行动、尤其是警告通知,更确切地说,优选地根据所确定的凝固持续时间低于预给定的阈值多少而触发。
16.本发明还涉及一种加工机器,用于激光焊接由金属材料、尤其由铜或铝制成的两个工件、优选棒状导体,该加工机器具有:用于产生激光射束的激光射束发生器;加工镜组,用于将激光射束对准两个工件的并排的端面,以便在两个端面上熔化熔珠,该熔珠随后凝固成焊珠;位置分辨的探测器,用于以位置分辨的方式探测熔珠;图像处理单元,用于分析评价由探测器拍摄的、位置分辨的探测器图像,以便确定从关断激光射束直至熔珠凝固为止的凝固持续时间;以及孔隙缺陷监控装置,所述孔隙缺陷监控装置根据所确定的凝固持续时间对已凝固的焊珠在孔隙缺陷方面进行监控或者分类。探测器有利地与激光射束同轴地对准工件的端面。
17.优选地,图像处理单元具有:强度等级像素图像产生装置,用于从所拍摄的探测器图像中产生强度等级像素图像;以及分析评价装置,用于分析评价强度等级像素图像,以便确定从关断激光射束直至焊珠凝固为止的凝固持续时间。
18.最后,本发明还涉及一种计算机程序产品,其具有代码介质,所述代码介质匹配为用于当在加工机器的机器控制装置上运行程序时执行根据本发明的方法的所有步骤。
19.本发明的主题的其它优点和有利构型可从说明书、附图中得出。同样,前面所述的和还要进一步列举的特征可以分别单独地或者多个任意组合地使用。所示出的和所描述的实施方式不应理解为最终的列举,而是更确切地说具有用于描述本发明的示例性特征。
附图说明
20.附图示出:
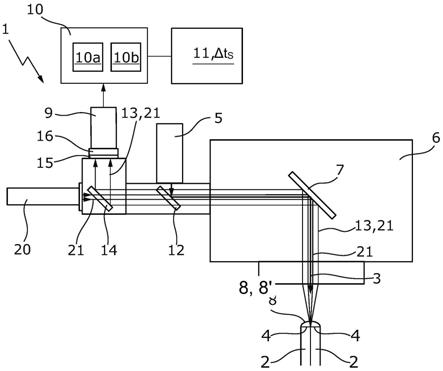
21.图1根据本发明的用于借助于激光射束激光焊接两个棒状导体的加工机器的示意图;
22.图2a-2c在两个棒状导体的端面上激光焊接两个棒状导体时产生的熔珠在激光射束关断之后(图2a)、在凝固期间(图2b)和在凝固之后(图2c)的图像;
23.图3液态熔珠的具有围绕熔珠中心点的环形图像局部的图像;和
24.图4a、4b由熔珠发射的热辐射的辐射强度的时间变化曲线(图4a)以及图像的分别在所拍摄的图像的预定图像像素上取平均的灰度值的时间变化曲线(图4b)。
具体实施方式
25.在图1中示意性示出的加工机器1用于借助于激光射束3激光焊接两个由金属材料制成的工件,其在此示例性地是两个由铜制成的弯曲的棒状导体2(发夹“hairpin”)的形式。两个棒状导体2具有相同的、带有相同横截面的待焊接端面4,并且以其端面4并排布置在优选相同的高度上。
26.加工机器1包括:用于产生激光射束3的激光射束发生器5;加工头6,其具有加工镜组7,用于将激光射束3对准两个棒状导体2的端面4,以便在端面4上使熔珠或熔区8熔化;对准熔珠8的、位置分辨的、例如摄像机9形式的探测器;图像处理单元10,用于分析评价由摄像机9以位置分辨的方式拍摄的数字图像;以及监控装置11,所述监控装置根据所分析评价
的摄像机图像对凝固成焊珠8’的熔珠8在孔隙形成方面进行监控。
27.由激光射束发生器5产生的激光射束3射到(例如二向色镜形式的)分束器12上,所述分束器对于激光射束3的波长是反射性的。激光射束3从分束器12通过在此未示出的聚焦装置(例如聚焦透镜)反射到加工镜组7上并且从那里对准两个端面4。加工镜组7例如可以是激光扫描器,该激光扫描器具有两个镜,这两个镜可分别围绕彼此成直角的轴线转动,以便以二维方式使激光射束3偏转。
28.通过摄像机9检测从熔珠8发出的图像射束13,所述图像射束经由加工镜组7、对于图像射束13可穿透的分束器12和对于图像射束13反射性的(例如二向色镜形式的)另一分束器14到达摄像机9并且在那里成像熔珠8的图像。如图所示,摄像机9借助于所述另一分束器14与激光射束3同轴地定向。在另一分束器14和摄像机9之间可选地还布置有光学滤波器15和用于聚焦图像射束13的准直透镜16。光学滤波器15阻挡激光射束3的波长,以便因此仅使从熔珠8发出的过程辐射穿过,但不允许在工件2上反射的激光射束3穿过。摄像机9可以实施为用于拍摄单个图像,或者实施为视频摄像机用于拍摄视频序列,其中,拍摄频率优选地至少为100hz。
29.激光焊接过程,尤其是在分别两个相同的工件2上以激光射束3的相同的激光功率和相同的焊接持续时间进行的多个相同的激光焊接过程,以下述方式来监控。
30.在工件加工之后,也就是说从关断激光射束3开始,利用摄像机9连续地拍摄熔珠8的图像17a-17c(图2a-2c),其中,在所拍摄的图像17a-17c中熔珠8显得明亮。图17a示出紧接在关断激光射束3之后并且在凝固之前的液态熔珠8,图17b示出在凝固期间的液态熔珠17b,并且图17c示出已凝固的熔珠8’。
31.在图像处理装置10的灰度像素图像产生装置10a中,从所拍摄的图像17a-17c中分别产生在x-y像素网格中具有0(暗)至255(亮)之间的像素值的灰度像素图像。随着熔珠8的温度逐渐降低,灰度值从亮到暗变化。在这些像素图像中,由图像处理装置10分别限定一相同的图像局部(“感兴趣区域”(roi))(图3),其例如是围绕熔珠8的中心点m的环形图像局部的形式。在图像处理装置10的分析评价装置10b中对感兴趣区域18中的像素图像进行分析评价,以便确定从关断激光射束3开始直至熔珠8凝固为止的凝固持续时间δt。
32.图4a示出了在时间点t=0关断激光射束3之后由熔珠8发射的热辐射的辐射强度i的时间变化曲线。辐射强度i在关断激光射束3之后下降并且在熔珠8凝固前的几毫秒直至凝固(时间点te)保持在一平台值上,进而随后下降到零。
33.在关断激光射束3之后,以时间分辨的方式在位置平均的感兴趣区域18内部检测灰度值变化曲线。为此,由分析评价装置10b针对每个像素图像求取在感兴趣区域18的所有像素上取平均的灰度值并且分析评价图4b中示出的取平均的灰度值的时间变化曲线。根据取平均的灰度值的特征时间变化曲线能够明确地确定凝固的时间点te并因此确定凝固持续时间δt。
34.在重复的相同激光焊接过程中,其中,激光射束3总是具有相同的激光功率和相同的焊接持续时间,在无孔隙缺陷的焊接的情况下,分别在具有相同的端面4和相同的棒横截面的两个相同的棒状导体2上,所有的焊接事件将具有相同的凝固持续时间δt。
35.在监控装置11中将如此确定的凝固持续时间δt与针对无孔隙缺陷的焊珠8预给定的应有凝固持续时间δts进行比较。当所确定的凝固持续时间δt低于预给定的阈值δts(δt《δts)时,将已凝固的焊珠8’分类为有缺陷(“存在孔隙缺陷”)。在偏差过大的情况下可以开始自动的再焊接或者触发任意的其它行动。
36.为了照明熔珠8,加工机器1可以具有照明激光器20,该照明激光器的照明射束21穿过两个对于照明射束21的波长在该方向上可透射的分束器12、14与激光射束3同轴地被耦合输入到加工头6中并且对准熔珠8。在工件2上反射的照明射束21以相反的路径返回到另一分束器14,该另一分束器在该方向上是反射性的并且使照明射束21转向到摄像机9上。在此,在所拍摄的图像中,熔珠8显得黑暗并且被照明的固体材料显得明亮。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1