马达之接地端子组装焊接设备及其操作方法与流程
1.本发明涉及电机组装领域技术,尤其是指一种马达之接地端子组装焊接设备及其操作方法。
背景技术:
2.现代生活中,各行各业中对于电机的需求越来越大,厂家生产电机的产量逐年递增。电机通常包括有铁壳、转子、定子和端盖,于端盖上安装有用于连接电源的端子。现有的端子装配工序主要还是由人工完成,人工安装容易把端子装反或漏装,另外人工装配端子用力不当容易损坏端盖上接口,装配端子时需要大量劳动力,并且装配效率低下,不良率高。为解决这一问题,市场上出现了针对端子的半自动组装设备,其中端子的转移及插装仍需要较多的人工配合,端子的焊接自动化程度较低,导致整体的端子装配效率仍较低。因此,应针对电子端子组装设计全自动化组装焊接设备,提高组装效率和产品合格率。
技术实现要素:
3.有鉴于此,本发明针对现有技术存在之缺失,其主要目的是提供一种马达之接地端子组装焊接设备及其操作方法,其通过将端子上料组装机构、焊接机构、检测机构、移料机构和输送机构结合于机架上形成针对马达端子的组装焊接设备,该设备实现了端子的自动上料、翻转递料、插装以及焊接操作,使端子的组装和焊接操作完全自动化进行。节省了大量的人工劳动,提高了马达的生产效率。
4.为实现上述目的,本发明采用如下之技术方案:
5.一种马达之接地端子组装焊接设备,其包括有机架、安装于机架上用于输送马达的输送机构、用于对马达进行找位操作的找位机构、用于输送端子,并将端子插装于马达上的端子上料组装机构、用于将端子焊接于马达上的焊接机构、用于检测端子焊接是否合格的检测机构以及用于转移焊接完端子马达的移料机构,该机架上设置有用于安装上述各机构的工作台;该端子上料组装机构包括有端子上料组件、用于将端子插装于马达上的插装组件以及用于将上料组件上端子转移至插装组件处并改变端子放置状态的翻转递料装置,该翻转递料装置连接于端子上料组件和插装组件之间;该焊接机构包括有旋转进出料组件、焊枪、驱动焊枪移动的焊枪驱动组件以及进锡丝组件,该焊枪安装于焊枪驱动组件之输出端上,该旋转进出料组件位于焊枪下方,该进锡丝组件位于焊枪侧旁;该输送机构横向设置于上述工作台上,上述找位机构、插装组件、旋转进出料组件、检测机构和移料机构沿马达输送方向依次设置于输送机构侧旁。
6.作为一种优选方案:所述翻转递料装置包括有翻转递料支架、安装于翻转递料支架上的旋转进出料组件、递料翻转组件和推料组件,该旋转进出料组件包括有旋转驱动气缸、安装于旋转驱动气缸轴端的旋转座以及安装于旋转座两端的接料块,于该接料块上竖向设置有接料槽;该递料翻转组件包括有递料座、安装于递料座上的翻转驱动气缸、安装于翻转驱动气缸轴端的翻转块,该递料座安装于上述翻转递料支架上,该翻转块上设置有用
于容置接地端子的容置槽,该容置槽与上述接料槽相对应;该推料组件包括有安装于递料座上的推料气缸和安装于推料气缸轴端的推料针,该推料针对应翻转块之容置槽。
7.作为一种优选方案:所述端子上料组件包括有振盆和连接于振盆出料端的直振送料器,上述翻转块可翻转式位于直振送料器出料端处;上述插装组件包括有插装支架、安装于插装支架上的插装驱动气缸、安装于插装驱动气缸轴端的插装针以及用于支撑马达的支撑组件,该插装支架位于上述旋转驱动气缸侧旁,该插装驱动气缸竖向安装于插装支架上,该插装针位于上述接料块上方;该支撑组件包括有支撑座和驱动支撑座于插装支架下方纵向移动的支撑座驱动气缸,该支撑座驱动气缸安装于插装支架下方,该支撑座安装于支撑座驱动气缸输出端,并位于上述接料块下方。
8.作为一种优选方案:所述翻转块具有与直振送料器之出料端可转动式配合的弧形部以及与接料块之接料槽所在平面齐平的平面部,上述容置槽竖向设置于该平面部上。
9.作为一种优选方案:所述旋转进出料组件包括有底座、安装于底座上的旋转气缸、安装于旋转气缸轴端的旋转座、安装于旋转座两端用于放置马达的放置座以及用于使放置座随旋转座转动180度后仍保持角度不变的带传动补偿组件,该带传动补偿组件包括有两中间带轮、两传动带和至少两个旋转带轮,该两中间带轮固定式竖向安装于旋转气缸轴端,该旋转带轮可转动式安装于旋转座两端,上述放置座与旋转带轮固连;其中一传动带套设于其中一中间带轮和旋转带轮上,另一传动带套设于另一中间带轮和另一旋转带轮上。
10.作为一种优选方案:所述旋转座两端分别间隔设置有两个放置座,于每个放置座下方分别固连有一上述旋转带轮,其中一传动带套设于其中一中间带轮和同一侧的两个旋转带轮上;另一传动带套设于另一中间带轮和另一侧的两个旋转带轮上。
11.作为一种优选方案:所述焊枪驱动组件包括有焊枪支架、安装于焊枪支架上的升降驱动装置和用于在端子焊接时遮盖电机非焊区域的护块装置,该升降驱动装置包括有滑台、上拉气缸、下推气缸、滑动座以及支撑板,该滑台竖向安装于上述焊枪支架上;该滑动座可上下滑动式安装于滑台上;该上拉气缸安装于滑台上端,并与滑动座相连;该下推气缸安装于滑台下端,并与滑动座相连;该支撑板固连于滑动座上;该护块装置包括有护块和驱动护块升降的驱动气缸,该驱动气缸竖向安装于支撑板上,该护块安装于驱动气缸轴端。
12.作为一种优选方案:所述进锡丝组件包括进丝支架、安装于进丝支架上的绕丝轮、驱动锡丝向前移动的进丝驱动装置以及用于引导锡丝伸向端子的引丝装置,该绕丝轮可转动式安装于进丝支架上;该进丝驱动装置位于绕丝轮前侧;该引丝装置包括有引丝支架、安装于引丝支架上的引丝气缸以及安装于引丝气缸之输出端上的引丝嘴,锡丝由绕丝轮经进丝驱动装置后,再由引丝嘴穿出;该引丝嘴朝向于上述焊枪。
13.作为一种优选方案:所述找位机构包括有用于驱动马达转动的旋转驱动组件和用于弹性抵紧马达外壁以对马达进行定位的定位组件,该旋转驱动组件具有供放置马达的旋转座,该定位组件具有可弹性伸缩的抵接头,该抵接头可相对于旋转座弹性式靠近或远离。
14.作为一种优选方案:所述检测机构包括有检测支架、安装于检测支架上用于检测端子是否焊接的第一ccd拍照装置和用于检测端子焊接是否有拉丝现象的第二ccd拍照装置。
15.一种如上所述的马达之接地端子组装焊接设备的操作方法,包括如下步骤:
16.s1、输送机构上马达转移至找位机构处,找位机构对马达进行圆周方向定位,为后
续端子的插装做准备;
17.s2、端子上料组件将端子送至翻转递料装置处,翻转递料装置将端子由水平状态调整为竖直状态,并转移至插装组件处;
18.s3、插装组件将端子插装于已经找好位的马达上,装完端子的马达移动至焊接机构处;
19.s4、焊接机构之旋转进出料组件将马达旋转至焊接位置,焊枪在焊枪驱动组件作用下靠近端子,进锡丝组件同步将锡丝引导至端子处,焊枪将端子焊接固定于马达上;
20.s5、焊接完成的马达转移至检测机构,检测机构对端子焊接处进行是否焊接和焊接是否有拉丝现象的检测;
21.s6、移料机构将检测合格的马达出料,不合格的收集转移。
22.本发明与现有技术相比具有明显的优点和有益效果,具体而言,由上述技术方案可知,通过将端子上料组装机构、焊接机构、检测机构、移料机构和输送机构结合于机架上形成针对马达端子的组装焊接设备,该设备实现了端子的自动上料、翻转递料、插装以及焊接操作,使端子的组装和焊接操作完全自动化进行。从而,节省了大量的人工劳动,提高了马达的生产效率,同时具有自动检测机构对焊接端子的马达进行检测,提高了产品合格率。
23.为更清楚地阐述本发明的结构特征和功效,下面结合附图与具体实施例来对其进行详细说明。
附图说明
24.图1为本发明之整机立体示意图;
25.图2为本发明之整机另一视角立体示意图;
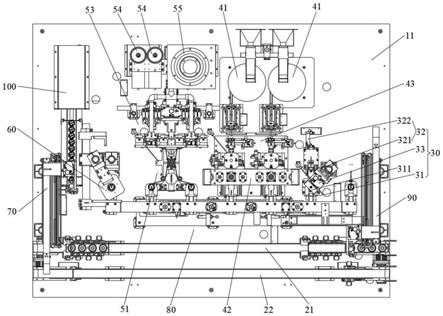
26.图3为本发明之整机俯视示意图;
27.图4为本发明之端子上料组装机构立体示意图;
28.图5为本发明之端子上料组装机构另一视角立体示意图;
29.图6为本发明之翻转递料装置立体示意图;
30.图7为本发明之插装组件主体结构立体示意图;
31.图8为本发明之焊接机构立体示意图;
32.图9为本发明之焊接机构另一视角立体示意图;
33.图10为本发明之焊接机构主体结构立体示意图;
34.图11为本发明之焊接机构主体结构另一视角立体示意图;
35.图12为本发明之焊接机构中旋转进出料组件立体示意图。
36.附图标识说明:
37.10、机架;11、工作台;20、输送机构;21、进料线;22、出料线;30、找位机构;31、旋转驱动组件;311、旋转座;312、电机;32、定位组件;321、抵接头;322、驱动气缸;33、下压组件;331、压头;332、下压气缸;40、端子上料组装机构;41、端子上料组件;411、振盆;412、直振送料器;42、插装组件;421、插装支架;422、插装驱动气缸;423、插装针;424、支撑组件;4241、支撑座;4242、支撑座驱动气缸;425、护针块;4251、护针槽;426、传感器;427、连接块;428、导向杆;43、翻转递料装置;431、翻转递料支架;432、旋转进出料组件;4321、旋转驱动气缸;4322、旋转座;4323、接料块;4324、接料槽;4325、支撑块;4326、弹簧;4327、限位块;4328、限
位螺栓;433、递料翻转组件;4331、递料座;4332、翻转驱动气缸;4333、翻转块;4334、容置槽;4335、传感器;4336、弧形部;4337、平面部;434、推料组件、4341、推料气缸;4342、推料针;50、焊接机构;51、旋转进出料组件;511、底座;512、旋转气缸;513、旋转座;514、放置座;515、带传动补偿组件;5151、中间带轮;5152、传动带;5153、旋转带轮;5154、张紧轮;52、焊枪;53、焊枪驱动组件;531、焊枪支架;532、升降驱动装置;5321、滑台;5322、上拉气缸;5323、下推气缸;5324、滑动座;5325、支撑板;533、护块装置;5331、护块;5332、驱动气缸;54、进锡丝组件;541、进丝支架;542、绕丝轮;543、进丝驱动装置;544、引丝装置;5441、引丝支架;5442、引丝气缸;5443、引丝嘴;55、抽烟装置;551、主抽烟管;552、副抽烟管;553、风机;60、检测机构;61、检测支架;62、第一ccd拍照装置;63、第二ccd拍照装置;64、举升气缸;70、移料机构;80、同步移料装置;81、移料支架;82、横向滑板;83、横向驱动气缸;84、竖向滑板;85、竖向驱动气缸;86、夹料气缸;90、转移机构;91、转移支架;92、转移夹爪;93、竖向驱动组件;94、横向驱动组件;100、不合格品收集区。
具体实施方式
38.本发明如图1至图12所示,一种马达之接地端子组装焊接设备及其操作方法,包括有机架10、安装于机架10上用于输送马达的输送机构20、用于对马达进行找位操作的找位机构30、用于输送端子,并将端子插装于马达上的端子上料组装机构40、用于将端子焊接于马达上的焊接机构50、用于检测端子焊接是否合格的检测机构60、用于转移焊接完端子马达的移料机构70以及不合格品收集区100,其中:
39.该机架10上设置有用于安装上述各机构的工作台11,上述各机构均安装于该工作台11上。
40.该输送机构20横向设置于上述工作台11上,该输送机构20采用带传动形式,也可以根据需要采用其它方式;于本实施例中,该输送机构20具有进料线21和出料线22,进料线21和出料线22平行设置于工作台11上。
41.该找位机构30位于输送机构20侧旁,其包括有用于驱动马达转动的旋转驱动组件31、用于弹性抵紧马达外壁以对马达进行定位的定位组件32以及向下抵住马达的下压组件33,该旋转驱动组件31具有供放置马达的旋转座311以及用于驱动旋转座311转动的电机312(图中未示),该定位组件32具有可弹性伸缩的抵接头321以及驱动抵接头321纵向移动的驱动气缸322,该抵接头321在驱动气缸322驱动下可相对于旋转座311弹性式靠近或远离;该下压组件33包括有压头331和下压气缸332,该下压气缸332竖向位于旋转座311上方,压头331可转动式安装于下压气缸332轴端。
42.马达由输送机构20到达找位机构30之旋转座311上后,下压气缸332驱动压头331向下抵紧马达,由于压头331可转动,所以电机312驱动旋转座311转动时,压头331随之转动;驱动气缸322驱动抵接头321弹性抵紧于马达外壁上,随之马达的转动,抵接头321将插至马达壳体之缺口中,此时,电机312停止转动,抵接头321复位,马达即被定位。
43.该端子上料组装机构40包括有端子上料组件41、用于将端子插装于马达上的插装组件42以及用于将上料组件上端子转移至插装组件42处并改变端子放置状态的翻转递料装置43,该翻转递料装置43连接于端子上料组件41和插装组件42之间。
44.该翻转递料装置43包括有翻转递料支架431、安装于翻转递料支架431上的旋转进
出料组件432、递料翻转组件433和推料组件434,该旋转进出料组件432包括有旋转驱动气缸4321、安装于旋转驱动气缸4321轴端的旋转座4322以及安装于旋转座4322两端的接料块4323,于该接料块4323上竖向设置有接料槽4324,该旋转驱动气缸4321驱动旋转座4322转动实现接料块4323的同步进料(待安装端子的马达)和出料(已安装端子的马达);该递料翻转组件433包括有递料座4331、安装于递料座4331上的翻转驱动气缸4332、安装于翻转驱动气缸4332轴端的翻转块4333,该递料座4331安装于上述翻转递料支架431上,该翻转块4333上设置有用于容置接地端子的容置槽4334,该容置槽4334与上述接料槽4324相对应;该推料组件434包括有安装于递料座4331上的推料气缸4341和安装于推料气缸4341轴端的推料针4342,该推料针4342对应翻转块4333之容置槽4334。于旋转座4322两端分别设置有一支撑块4325,上述接料块4323竖向可弹性浮动式安装于该支撑块4325上(于支撑块4325和接料块4323之间设置有弹簧4326,该弹簧4326用于驱动接料块4323向上弹性复位);并于旋转座4322两端对应接料块4323下方设置有限位块4327,于限位块4327上设置有限位螺栓4328,限位螺栓4328可以相对于限位块4327升降调节,限位螺栓4328对应位于接料块4323下方,可以防止接料块4323下降幅度过大而超出预定距离。于递料座4331上设置有用于检测是否有接地端子到达容置槽4334中的传感器4335。本实施例中包括有两组端子上料组件41和插装组件42,该两组上料组件和插装组件42一一对应。
45.该端子上料组件41包括有振盆411和连接于振盆411出料端的直振送料器412,上述翻转块4333可翻转式位于直振送料器出料端处;上述插装组件42包括有插装支架421、安装于插装支架421上的插装驱动气缸422、安装于插装驱动气缸422轴端的插装针423以及用于支撑马达的支撑组件424,该插装支架421位于上述旋转驱动气缸4321侧旁,该插装驱动气缸422竖向安装于插装支架421上,该插装针423位于上述接料块4323上方;该支撑组件424包括有支撑座4241和驱动支撑座4241于插装支架421下方纵向移动的支撑座驱动气缸4242,该支撑座驱动气缸4242安装于插装支架421下方,该支撑座4241安装于支撑座驱动气缸4242输出端,并位于上述接料块4323下方。于插装支架421上设置有用于防止插装针423在下压时受力弯曲的护针块425,于护针块425上竖向设置有护针槽4251,插装针423可上下移动式与护针槽4251滑动接触,护针槽4251主要用于供插装针423抵靠,以防止插装针423下压抵到端子时弯曲损坏。该翻转块4333具有与直振送料器412之出料端可转动式配合的弧形部4336以及与接料块4323之接料槽4324所在平面齐平的平面部4337,上述容置槽4334竖向设置于该平面部4337上,弧形部4336的设计可以避免翻转块4333在翻转过程中与直振送料器412之出料端发生干涉,以保证翻转块4333的正常翻转;于插装支架421下方设置有用于检测插装针423下方是否有马达的传感器426;另外于插装驱动气缸422轴端设置有一连接块427,于上述插装支架421上设置有用于对连接块427上下移动进行导向的导向杆428,该导向杆428可上下滑动式安装于插装支架421上,连接块427安装于导向杆428下端,上述插装针423竖向设置于连接块427上。
46.该端子上料组装机构工作原理如下:翻转块4333水平与直振送料器412相连;振盆411中装有端子,经过直振送料器412进入到翻转块4333之容置槽4334中,翻转驱动气缸4332驱动翻转块4333由水平状态翻转为竖直状态(改变端子的放置状态);推料气缸4341驱动推料针4342向下伸入到容置槽4334中,将容置槽4334中端子向下推至接料块4323之接料槽4324中。旋转驱动气缸4321驱动旋转座4322转动以将装有端子的接料块4323旋转至插装
针423下方;此时,支撑座驱动气缸4242已驱动放有马达(已找好位)的支撑座4241纵向移动至接料槽4324下方,插装驱动气缸422驱动插装针423向下伸入接料槽4324中将接料槽4324中端子竖向顶推入支撑座4241上的马达上端,即完成端子的上料和组装。
47.上述端子上料组件41、插装组件42以及翻转递料装置43,分别为两组,如图4至图7所示,两组并排设置可以实现两组机构的快速上料组装,提高生产效率。
48.该焊接机构50包括有旋转进出料组件51、焊枪52、驱动焊枪52移动的焊枪驱动组件53以及进锡丝组件54,该焊枪52安装于焊枪驱动组件53之输出端上,该旋转进出料组件51位于焊枪52下方,该进锡丝组件54位于焊枪52侧旁。
49.该旋转进出料组件51包括有底座511、安装于底座511上的旋转气缸512、安装于旋转气缸512轴端的旋转座513、安装于旋转座513两端用于放置马达的放置座514以及用于使放置座514随旋转座513转动180度后仍保持角度不变的带传动补偿组件515,该带传动补偿组件515包括有两中间带轮5151、两传动带5152和至少两个旋转带轮5153;该两中间带轮5151固定式竖向安装于旋转气缸512轴端,该旋转带轮5153可转动式安装于旋转座513两端,上述放置座514与旋转带轮5153固连;其中一传动带5152套设于其中一中间带轮5151和一端的旋转带轮5153上,另一传动带5152套设于另一中间带轮5151和另一端的旋转带轮5153上。于本实施例中,于旋转座513两端分别间隔设置有两个放置座514,于每个放置座514下方分别固连有一上述旋转带轮5153,其中一传动带5152套设于其中一中间带轮5151和一端的两个旋转带轮5153上;另一传动带5152套设于另一中间带轮5151和另一端的两个旋转带轮5153上。并于旋转座513上对称设置有对上述两个传动带5152进行张紧的张紧轮5154,张紧轮5154与传动带5152紧贴。中间带轮5151和旋转带轮5153优先选用同步带轮,传动带5152优先选用同步带。
50.旋转气缸512驱动旋转座513转动180
°
时,两个中间带轮5151固定不动,传动带5152随着旋转座513的转动将带动旋转带轮5153转动,旋转带轮5153带动对应的放置座514转动,以保证放置座514空间位置发生180
°
旋转变化后,其自身圆周角度与旋转之前保持一致(找位后的角度),从而,顺利完成端子焊接。
51.该焊枪驱动组件53包括有焊枪支架531、安装于焊枪支架531上的升降驱动装置532和用于在端子焊接时遮盖电机非焊区域以防止非焊区域损坏的护块装置533,该升降驱动装置532包括有滑台5321、上拉气缸5322、下推气缸5323、滑动座5324以及支撑板5325,该滑台5321竖向安装于上述焊枪支架531上;该滑动座5324可上下滑动式安装于滑台5321上;该上拉气缸5322安装于滑台5321上端,并与滑动座5324相连;该下推气缸5323安装于滑台5321下端,并与滑动座5324相连;采用上拉气缸5322、下推气缸5323相互配合(两气缸的输出端同向运动驱动焊枪移动),主要目的为使焊枪52的升降距离更加精确,解决传统焊接时采用一个气缸驱动,焊枪52移动精度不高的问题。该支撑板5325固连于滑动座5324上;该护块装置533包括有护块5331和驱动护块5331升降的驱动气缸5332,该驱动气缸竖向安装于支撑板5325上,该护块5331安装于驱动气缸5332轴端。并上述焊枪52有两个,该两个焊枪52呈倒八字形设置于支撑板5325上,且位于上述护块5331两侧;且焊枪52可前后调节式安装于支撑板5325上;焊枪52通过一可于支撑板5325上前后滑动的座体连接于支撑板5325,采用螺栓可控制座体的移动,进而对焊枪52前后调节。
52.该进锡丝组件54包括进丝支架541、安装于进丝支架541上的绕丝轮542、驱动锡丝
向前移动的进丝驱动装置543以及用于引导锡丝伸向端子的引丝装置544,该绕丝轮542可转动式安装于进丝支架541上;该进丝驱动装置543位于绕丝轮542前侧;该引丝装置544包括有引丝支架5441、安装于引丝支架5441上的引丝气缸5442以及安装于引丝气缸5442之输出端上的引丝嘴5443,锡丝由绕丝轮542经进丝驱动装置543后(进丝驱动装置543采用电机带动齿轮转动的驱动方式,锡丝与齿轮贴合,随着齿轮的转动将锡丝向前拨动,实现进丝),再由引丝嘴5443穿出;该引丝嘴5443朝向于上述焊枪52。
53.该焊接机构50具有两组焊枪52,每组焊枪52均有两个呈倒八字形分布的焊枪52;对应两组焊枪52设置有两组上述进锡丝组件54,每组进锡丝组件54对应一组焊枪52;并焊接机构50还包括有用于排出焊接时产生有毒气体的抽烟装置55,该抽烟装置55包括有主抽烟管551、两副抽烟管552和风机553,该主抽烟管551上端与风机553(图中未示)相连,下端与两副抽烟管552上端相连,两副抽烟管552下端一一对应朝向于两焊枪。
54.该焊接机构的工作原理如下:旋转进出料组件51将装好端子的马达旋转进料至焊枪52下方,焊枪驱动组件53驱动焊枪52靠近端子;同时,进锡丝组件54自动进料,护块装置533将马达非焊接区域遮盖住以防止端子焊接时高温损坏。焊接完成的马达端子由旋转进出料组件51旋转出料,同时,待焊接的马达端子再次进料;抽烟装置55将焊接产生的有毒气体向外抽出。
55.该检测机构60包括有检测支架61、安装于检测支架61上用于检测端子是否焊接的第一ccd拍照装置62和用于检测端子焊接是否有拉丝现象的第二ccd拍照装置63。对应第一ccd拍照装置62和第二ccd拍照装置63设置有一用于将焊接完端子的马达举升起来的举升气缸64(举升气缸64输出端具有供放置马达的放置座,马达放于该放置座上),该举升气缸64将由下述同步移料装置80传递过来的马达举升至第一ccd拍照装置62和第二ccd拍照装置63前,供其拍照检测。
56.上述找位机构30、插装组件42、旋转进出料组件51、检测机构60和移料机构70沿马达输送方向依次设置于输送机构20侧旁。
57.并且,于输送机构20与找位机构30、插装组件42、旋转进出料组件51、检测机构60和移料机构70之间还设置有一同步移料装置80,该同步移料装置80包括有移料支架81、横向滑板82、横向驱动气缸83、竖向滑板84、竖向驱动气缸85和复数个夹料气缸86,该移料支架81横向安装于工作台11上,该横向滑板82可横向滑动式安装于移料支架81上,该横向驱动气缸83(图中未示)安装于移料支架81上,其轴端与横向滑板82相连;该竖向滑板84可竖向滑动式安装于横向滑板82上,该竖向驱动气缸85竖直安装于竖向滑板84上,并其轴端与横向滑板82相连;该复数个夹料气缸86间隔式安装于竖向滑板84上;在横向驱动气缸83和竖向驱动气缸85的作用下,复数个夹料气缸86往返于找位机构30之旋转座311、插装组件42之支撑座4241、旋转进出料组件51之放置座514、检测机构60和移料机构70之间对马达进行转移操作。该同步移料装置80具体在运行时,夹料气缸86先夹住相应位置的马达,然后,竖向驱动气缸85轴端伸出时,其缸体将带动竖向滑板84抬升,复数个夹料气缸86同步抬升;横向驱动气缸83驱动横向滑板82移动,带动复数个夹料气缸86同步移动,移动到位后,竖向驱动气缸85驱动复数个夹料气缸86下降以将马达放置于对应的位置(如旋转座、支撑座和放置座等);竖向驱动气缸85再次驱动复数个夹料气缸86抬升,横向驱动气缸83再次驱动复数个夹料气缸86横向移动至原位,依次循环,实现多个马达在各个工位上的依次转移。
58.另外,于同步移料装置80和输送机构20之间设置有一用于将输送机构20之进料线21上待装端子的马达转移至同步移料装置80上的转移机构90,该转移机构90包括有转移支架91、转移夹爪92、驱动转移夹爪92竖向移动的竖向驱动组件93和驱动转移夹爪92横向移动的横向驱动组件94,该横向驱动组件94安装于转移支架91上,该竖向驱动组件93安装于横向驱动组件94之输出端上,该转移夹爪92安装于竖向驱动组件93之输出端上,横向驱动组件94和竖向驱动组件93分别包括有气缸和滑块,滑块安装于气缸轴端,滑块即为输出端。该转移夹爪92先将输送机构20上的马达夹取转移至找位机构30之旋转座311上,马达找位完成后,同步移料装置80之夹料气缸86将马达依次向插装组件42之支撑座4241、旋转进出料组件51之放置座514、检测机构60之举升气缸64和移料机构70转移。
59.该移料机构70用于将检测合格的马达转移至输送机构20之出料线22上;将不合格的马达转移至不合格品收集区100(不合格品收集区位于移料机构70侧旁)中;该移料机构70具体是将举升气缸64举升的马达(已检测)向输送机构20之出料线22或不合格品收集区100转移。该移料机构70与上述转移机构90结构和原理相同,在此不予赘述。
60.该组装焊接设备的操作方法,包括如下步骤:
61.s1、输送机构上马达转移至找位机构处,找位机构对马达进行圆周方向定位,为后续端子的插装做准备;
62.s2、端子上料组件将端子送至翻转递料装置处,翻转递料装置将端子由水平状态调整为竖直状态,并转移至插装组件处;
63.s3、插装组件将端子插装于已经找好位的马达上,装完端子的马达移动至焊接机构处;
64.s4、焊接机构之旋转进出料组件将马达旋转至焊接位置,焊枪在焊枪驱动组件作用下靠近端子,进锡丝组件同步将锡丝引导至端子处,焊枪将端子焊接固定于马达上;
65.s5、焊接完成的马达转移至检测机构,检测机构对端子焊接处进行是否焊接和焊接是否有拉丝现象的检测;
66.s6、移料机构将检测合格的马达出料,不合格的收集转移。
67.本发明的设计重点在于,通过将端子上料组装机构、焊接机构、检测机构、移料机构和输送机构结合于机架上形成针对马达端子的组装焊接设备,该设备实现了端子的自动上料、翻转递料、插装以及焊接操作,使端子的组装和焊接操作完全自动化进行。从而,节省了大量的人工劳动,提高了马达的生产效率,同时具有自动检测机构对焊接端子的马达进行检测,提高了产品合格率。
68.以上所述,仅是本发明的较佳实施例而已,并非对本发明的技术范围作任何限制,故凡是依据本发明的技术实质对以上实施例所做的任何细微修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1