翻转盖板机构的制作方法
1.本实用新型属于夹紧工装技术领域,具体涉及翻转盖板机构。
背景技术:
2.夹具是加工时用来迅速紧固工件,使机床、刀具、工件保持正确相对位置的工艺装置。也就是说,工装夹具是机械加工不可缺少的部件,工装夹具的种类多种多样,其中,翻转盖板机构可对工件进行单项压紧。
3.现有的翻转盖板机构功能较为单一,仅依靠人员肉眼观察压紧的精度,无法根据盖板动作的位置进行自行判断,压紧精度较低,无法满足高精度的压紧需求。
4.因此,本领域技术人员提供了翻转盖板机构,以解决上述背景技术中提出的问题。
技术实现要素:
5.为解决上述背景技术中提出的问题。本实用新型提供了翻转盖板机构,具有压紧精度高的特点。
6.为实现上述目的,本实用新型提供如下技术方案:翻转盖板机构,包括支撑机构和安装在其顶端的压紧机构,所述支撑机构包括支架和安装在其一侧的气缸,所述气缸与外部气源传动连接,所述支架的底端一侧固定连接有支座,所述气缸的底端与所述支座铰接,所述支架的顶端固定连接有支板,所述压紧机构包括连接臂和固定在其一端的盖板,所述连接臂远离所述盖板的一端与所述支板铰接,所述连接臂靠近所述支板的一端底面固定连接有驱动臂,所述气缸的伸缩端与所述驱动臂铰接,所述盖板的顶面中间位置处同轴固定连接有液压油缸,所述液压油缸与外部液压站传动连接,所述液压油缸的伸缩端固定连接有压板,所述压板位于所述盖板的下方,所述压板上周向均匀贯穿固定有若干个第一接近传感器,所述第一接近传感器的探测端与所述压板的底面平齐,所述第一接近传感器的顶端滑动贯穿所述盖板,所述盖板上上周向均匀贯穿固定有若干个超声波距离传感器,所述超声波距离传感器的探测端位于所述盖板下方,所述超声波距离传感器和所述第一接近传感器均与外部控制器信号连接,所述支板上安装有用于对所述连接臂进行限位的限位机构和用于驱动所述限位机构的驱动机构。
7.优选的,所述连接臂靠近所述支板的一端固定连接有连接轴,所述连接轴与所述支板转动连接,所述连接轴贯穿延伸至所述支板外侧的一端侧壁固定连接有挡块。
8.优选的,所述限位机构包括蜗轮和固定在其内侧壁的限位块,所述限位块与所述挡块对应,所述蜗轮与所述连接轴为同轴布置,所述蜗轮的一周均匀布置有三个用于对所述蜗轮进行限位的t形限位柱,所述t形限位柱与所述支板转动连接。
9.优选的,所述驱动机构包括两个对称固定在所述支板上的安装板,两个所述安装板之间转动连接有蜗杆,所述蜗杆的一端同轴固定连接有卡块。
10.优选的,所述限位块上贯穿固定有第二接近传感器,所述第二接近传感器的探测端与所述挡块对应。
11.优选的,所述气缸的底端固定有下铰接架,所述气缸的伸缩端固定有上铰接架,所述气缸通过所述下铰接架与所述支座铰接,所述气缸通过所述上铰接架与所述驱动臂铰接。
12.与现有技术相比,本实用新型的有益效果是:
13.在使用时,气缸通过驱动臂带动连接臂沿支板进行转动,盖板和压板同步进行转动,在需要对工件进行压紧时,将压板转动至与工件接触,第一接近传感器检测到与工件接触后,气缸停止动作,然后,盖板上的液压油缸驱动,压板向下移动,对工件进行压紧,同时,多个超声波距离传感器检测压板的相对距离,若压板发生角度偏转,多个超声波距离传感器检测到与压板的相对距离不同,液压油缸停止动作,人员调整工件位置后重进压接,保证压紧力的平衡,提高压紧精度。
附图说明
14.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
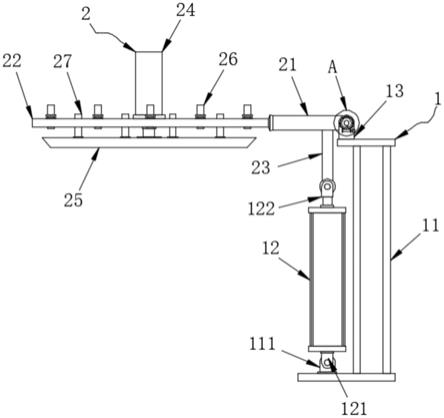
15.图1为本实用新型的结构示意图;
16.图2为本实用新型中的盖板俯视图;
17.图3为图1中a处放大示意图;
18.图4为本实用新型中的t形限位柱结构示意图;
19.图5为本实用新型中的压板仰视图。
20.图中:1、支撑机构;11、支架;111、支座;12、气缸;121、下铰接架;122、上铰接架;13、支板;2、压紧机构;21、连接臂;211、连接轴;212、挡块;22、盖板;23、驱动臂;24、液压油缸;25、压板;26、超声波距离传感器;27、第一接近传感器;3、限位机构;31、蜗轮;32、限位块;33、第二接近传感器;34、t形限位柱;4、驱动机构;41、安装板;42、蜗杆;43、卡块。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1
‑
5,本实用新型提供以下技术方案:翻转盖板机构,包括支撑机构1和安装在其顶端的压紧机构2,支撑机构1包括支架11和安装在其一侧的气缸12,气缸12与外部气源传动连接,支架11的底端一侧固定连接有支座111,气缸12的底端与支座111铰接,支架11的顶端固定连接有支板13,压紧机构2包括连接臂21和固定在其一端的盖板22,连接臂21远离盖板22的一端与支板13铰接,连接臂21靠近支板13的一端底面固定连接有驱动臂23,气缸12的伸缩端与驱动臂23铰接,盖板22的顶面中间位置处同轴固定连接有液压油缸24,液压油缸24与外部液压站传动连接,液压油缸24的伸缩端固定连接有压板25,压板25位于盖板22的下方,压板25上周向均匀贯穿固定有若干个第一接近传感器27,第一接近传感器27的探测端与压板25的底面平齐,第一接近传感器27的顶端滑动贯穿盖板22,盖板22上上周向均匀贯穿固定有若干个超声波距离传感器26,超声波距离传感器26的探测端位于盖板
22下方,超声波距离传感器26和第一接近传感器27均与外部控制器信号连接,支板13上安装有用于对连接臂21进行限位的限位机构3和用于驱动限位机构3的驱动机构4。
23.本实施方案中:在使用时,气缸12(型号sc63x100)、液压油缸24(型号hsg63*35*390
‑
25mpa)、超声波距离传感器26(型号mso
‑
pt1040h07r)、第一接近传感器27(型号im12
‑
d1la04)和第二接近传感器33(型号im12
‑
d1la04)均与外部控制器信号连接,通过控制器控制气缸12动作,从而控制连接臂21、盖板22和压板25的转动,手动控制点动位置,松开动作停止,气缸12通过驱动臂23带动连接臂21沿支板13进行转动,盖板22和压板25同步进行转动,在需要对工件进行压紧时,将压板25转动至与工件接触,第一接近传感器27检测到与工件接触后,气缸12停止动作,然后,盖板22上的液压油缸24驱动,压板25向下移动,对工件进行压紧,同时,多个超声波距离传感器26检测压板25的相对距离,若压板25发生角度偏转,多个超声波距离传感器26检测到与压板25的相对距离不同,液压油缸24停止动作,人员调整工件位置后重进压接,保证压紧力的平衡,提高压紧精度。
24.在图1和图3中:连接臂21靠近支板13的一端固定连接有连接轴211,连接轴211与支板13转动连接,连接轴211贯穿延伸至支板13外侧的一端侧壁固定连接有挡块212,限位机构3包括蜗轮31和固定在其内侧壁的限位块32,限位块32与挡块212对应,蜗轮31与连接轴211为同轴布置,蜗轮31的一周均匀布置有三个用于对蜗轮31进行限位的t形限位柱34,t形限位柱34与支板13转动连接,驱动机构4包括两个对称固定在支板13上的安装板41,两个安装板41之间转动连接有蜗杆42,蜗杆42的一端同轴固定连接有卡块43,通过卡块43对安装板41上的蜗杆42进行转动,蜗杆42带动蜗轮31进行转动,蜗轮31在t形限位柱34的限位下进行转动,调节限位块32的具体位置,在连接臂21转动对工件压紧时,在连接轴211上的挡块212转动至指定角度后,挡块212与限位块32进行抵紧接触,使得连接臂21的转动角度较为精确,提高压紧精度,同时,还可根据具体的使用情况进行调整,适用性较高,限位块32上贯穿固定有第二接近传感器33,第二接近传感器33的探测端与挡块212对应,挡块212与限位块32上的第二接近传感器33抵紧接触时,第二接近传感器33将信号传输至外部控制器,控制气缸12立即停止。
25.在图1中:气缸12的底端固定有下铰接架121,气缸12的伸缩端固定有上铰接架122,气缸12通过下铰接架121与支座111铰接,气缸12通过上铰接架122与驱动臂23铰接,在气缸12伸缩端伸缩时,气缸12沿下铰接架121和上铰接架122进行摆动,起到连接的作用。
26.本实用新型的工作原理及使用流程:在使用时,气缸12通过驱动臂23带动连接臂21沿支板13进行转动,盖板22和压板25同步进行转动,在需要对工件进行压紧时,将压板25转动至与工件接触,第一接近传感器27检测到与工件接触后,气缸12停止动作,然后,盖板22上的液压油缸24驱动,压板25向下移动,对工件进行压紧,同时,多个超声波距离传感器26检测压板25的相对距离,若压板25发生角度偏转,多个超声波距离传感器26检测到与压板25的相对距离不同,液压油缸24停止动作,人员调整工件位置后重进压接,保证压紧力的平衡,提高压紧精度,在连接臂21转动对工件压紧时,在连接轴211上的挡块212转动至指定角度后,挡块212与限位块32进行抵紧接触,使得连接臂21的转动角度较为精确,提高压紧精度,同时,还可根据具体的使用情况进行调整,适用性较高,限位块32上贯穿固定有第二接近传感器33,第二接近传感器33的探测端与挡块212对应,挡块212与限位块32上的第二接近传感器33抵紧接触时,第二接近传感器33将信号传输至外部控制器,控制气缸12立即
停止。
27.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1