一种定位爪安装设备的制作方法
1.本实用新型涉及电连接器组装技术领域,尤其是涉及一种定位爪安装设备。
背景技术:
2.随着科学技术的不断发展,电连接器的使用量大,使用范围广,但长期以来,并没有引起人们的足够重视,在生产过程中往往忽略电连接器的连接工艺。由于电连接器连接引起的故障问题,对飞机产生了较大的影响,因此必须重视对电连接器连接的工艺。电连接器的底座中安装有数根用来适配电针的定位爪,以往这些定位爪由人工逐根装配,速度较慢。随着电连接器的小型化和功能的多样化,定位爪的直径逐渐变小,定位爪的密度逐渐变大,人工装配已无法满足现有的电连接器中的定位爪装配需求,因此自动化装配定位爪的设备应需而生。现有的定位爪自动装配设备的装配速度较慢,且次品率高,因此需要对现有的装配设备进行改进。
技术实现要素:
3.本实用新型所要解决的技术问题是:提供一种定位爪组装速度快、良品率高的定位爪组装设备。
4.为解决上述技术问题,本实用新型采用的技术方案如下:
5.一种定位爪安装设备,包括料带放卷机、上料平台、上料机械手、组装平台、ccd视觉模组、定位爪裁切送料装置和定位爪组装装置;所述上料平台中设置有底座定位夹具一,所述组装平台中设置有底座定位夹具二,所述组装平台安装有直线模组的滑台上,所述上料机械手设置于所述直线模组的旁侧,所述上料机械手将上料平台中的底座夹取至所述底座定位夹具二中;所述ccd视觉模组的摄像部件安装于所述直线模组的旁侧,所述ccd视觉模组采集底座的影像;
6.所述定位爪裁切送料装置包括料带提升机构、料头侧推裁切机构和料带导向机构,所述料头侧推裁切机构位于所述料带导向机构的上方,所述料带导向机构位于所述料带导向机构的旁侧;经所述料带放卷机释放的料带穿设于所述料带导向机构中;所述料带提升机构将料带向上步进提起,所述料头侧推裁切机构切除料带余料;
7.所述定位爪组装装置包括两轴位移平台和定位爪夹持机构,所述定位爪夹持机构安装于所述两轴位移平台的z轴;所述定位爪夹持机构包括:夹爪、第一伺服电机、推杆和第二伺服电机,所述夹爪主要由两只以上的爪部、开合导向件和限位外壳组成,所述开合导向件安装于所述限位外壳内,所述限位外壳内对应每一只所述爪部均设置有一个横向导槽,于所述横向导槽内各安装有一块滑块,所述爪部与所述滑块固定连接;所述开合导向件中对应每一只所述爪部均设置有一条导向斜槽,所述滑块通过凸台卡接于所述导向斜槽内;第一伺服电机的输出轴与第一滚珠丝杆副连接,所述第一滚珠丝杆副中的移动件与所述开合导向件固连,所述第一伺服电机驱动所述开合导向件伸降;推杆设置于所述开合导向件中,所述推杆的侧壁等角度阵列有数根凸棱,所述爪部的内壁设置有与对应的凸棱适配的
卡槽;第二伺服电机的输出轴与第二滚珠丝杆副连接,所述第二滚珠丝杆副中的移动件与所述推杆固连,所述第二伺服电机驱动所述推杆升降。
8.与现有技术相比,本实用新型的有益效果是:
9.1.运用ccd视觉模组抓取底座中的定位爪安装孔的实际位置,定位爪组装装置根据ccd视觉模组的计算数据实时调整行进距离,保证了定位爪能准确地安装到底座中,提高了定位爪的安装精度;
10.2.料头侧推裁切机构先将遮挡定位爪的料头侧向弯折,待最高处的定位爪被取走后,料头侧推裁切机构再将多余的料头去除,料带导向机构与料带提升机构协同实现料带的自动上升走料,将新的料头和定位爪送至抓取高度,本实用新型的三个机构协同作用保证了定位爪安装机构能够顺利从指定高度取走定位爪;
11.3.通过在推杆上增加凸棱的方式,使得夹爪在抓取定位爪时能够内缩的更小,如此夹爪的前端可以插入底座的插孔内进行导向,在定位爪插入过程中,定位爪的侧壁与插孔的内壁之间始终保持有一定的间距,如此便可防止定位爪刮伤插孔内壁。
附图说明
12.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍。
13.图1为定位爪料带的结构图;
14.图2为一种定位爪安装设备的结构示意图;
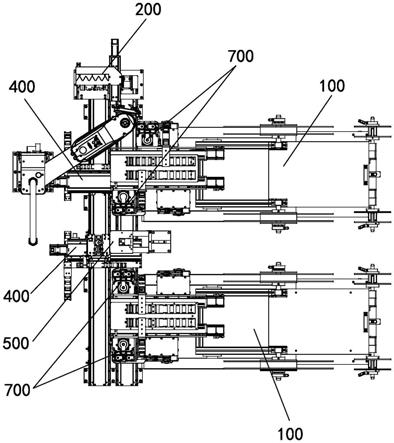
15.图3为一种定位爪安装设备的俯视图;
16.图4为一种定位爪安装设备的局部结构图;
17.图5和6为料头侧推裁切机构的结构图;
18.图7为料头侧推裁切机构的主视图;
19.图8为料头侧推裁切机构的局部示意图;
20.图9为定位爪裁切送料装置的局部示意图;
21.图10为定位爪组装装置的结构图;
22.图11为定位爪组装装置的主视图;
23.图12为夹爪的局部结构图;
24.图13为夹爪的打开状态示意图;
25.图14为夹爪的关闭状态示意图;
26.图15为推杆的结构图。
具体实施方式
27.下面将结合附图1
‑
15对本实用新型实施例中的技术方案进行清楚、完整地描述。
28.实施例
29.如图2和3所示的一种定位爪安装设备,包括两组料带放卷机100、一个上料平台200、上料机械手300、两个组装平台400、ccd视觉模组500、四组定位爪裁切送料装置600和四组定位爪组装装置700。上料平台200中设置有底座定位夹具一800,组装平台400中设置有底座定位夹具二900,组装平台400安装有直线模组的滑台上,上料机械手300设置于直线
模组的旁侧,上料机械手300将上料平台200中的底座夹取至底座定位夹具二900中;ccd视觉模组500的摄像部件安装于直线模组的旁侧,ccd视觉模组500采集底座的影像。一个组装平台400对应两组定位爪裁切送料装置600和两组定位爪组装装置700,底座定位夹具二900中可以装载两个底座,每一个底座对应一个定位爪裁切送料装置600和一个定位爪组装装置700,其中一个定位爪裁切送料装置600工作时,对应另一个底座的定位爪组装装置700进行定位爪组装。本设备可以同时进行四个底座的定位爪组装,有效地提高了定位爪的组装速度。
30.图1中所示的是载有定位爪的料带,其包括料头a、定位爪b和定位孔c,其中料头a会阻挡设备抓取定位爪b,因此在抓取之前需要将料头a向侧面弯折让位。定位爪裁切送料装置的结构基于上述思路设计,主要包括料带提升机构610、料头侧推裁切机构620和料带导向机构630,料头侧推裁切机构620位于料带导向机构630的上方,料带导向机构630位于料带导向机构630的旁侧。料头侧推裁切机构620包括侧推块621、导向块622、衬块623、限位块624、动力传输组件一、动力传输组件二和伺服减速电机627,导向块622横向设置,衬块623固定于导向块622中,侧推块621和限位块624滑接于导向块622内,并分别位于衬块623的两侧,侧推块621对应限位块624的一侧设置有对定位爪让位的孔槽;伺服减速电机627的输出轴的前端安装有一传动轴628,在传动轴628上安装有凸轮一6291和凸轮二6292。动力传输组件一连接凸轮一6291与侧推块621,伺服减速电机627驱动侧推块621在导向块622中平移;动力传输组件二连接凸轮二6292与限位块624,伺服减速电机627驱动限位块624在导向块622中平移。动力传输组件一包括曲柄一6251、连接臂一6252和从动轮一6253,曲柄一6251的一端与侧推块621通过销轴连接,另一端通过销轴与连接臂一6252的一端连接,曲柄一6251通过转轴固定安装于支架中;从动轮一6253固定安装于一块滑板一6254上,滑板一6254滑接于支架侧面的导轨一6255上;滑板一6254与连接臂一6252连接,凸轮一6291的侧边与从动轮一6253相切式活动连接;动力传输组件二包括滑板二6261和连接臂二6262,滑板二6261滑接于支架侧面的导轨二6263上,滑板二6261与连接臂二6262连接,连接臂二6262与限位块624固连;滑板一6254与滑板二6261之间通过拉簧6264连接。
31.料带提升机构610包括凸轮升降模组611、提升块612和定位销613,传动轴628通过齿轮组件614与凸轮升降模组611连接,凸轮升降模组611的升降组件与提升块612固连,并驱动提升块612升降,定位销613固定于提升块612的侧面,定位销613与料带的定位孔适配。齿轮组件614包括主动齿轮、从动齿轮和两个张紧轮,主动齿轮安装于传动轴628上,从动齿轮与凸轮升降模组611的输入轴连接;凸轮升降模组611采用滑块滑接于底座的导轨三615上,并由气缸616驱动位移。
32.料带导向机构630包括料带导向槽631和弹性止停钩块632,料带导向槽631竖直放置,料带出口对应衬块623与侧推块621之间,弹性止停钩块632固定于料带导向槽631的侧面,弹性止停钩块632位于提升块612的上方,其前端插入料带的导向孔内。上述裁切送料装置的动作流程是:
33.第一步,载有定位爪的料带穿设于料带导向槽631内,利用料带提升机构610将料头拉到衬块623与侧推块621之间,弹性止停钩块632的前端插入料带的导向孔内将料带定位,并防止料带下滑;
34.第二步,气缸616驱动料带提升机构610后退,定位销613从料带的导向孔内退出;
35.第二步,伺服减速电机627驱动传动轴628转动,凸轮一6291跟随传动轴628转动,凸轮一6291施加在从动轮一6253上的推力逐渐变大,滑块一在曲柄一6251和连接臂一6252的作用下逐渐向衬块623处靠拢,侧推块621将料头向侧面推去;凸轮二6292也会跟随传动轴628转动,凸轮二6292施加在从动轮二上的推力逐渐变小,滑块二在拉簧6264的作用下逐渐向衬块623处靠拢,限位块624位于衬块623的上方并与料带贴合;侧推块621侧推料头,料头在限位块624的斜面作用下,有限度地倾斜;
36.第三步,定位爪组装装置700运行至定位爪的上方将定位爪取走;
37.第四步,伺服减速电机627驱动传动轴628继续正向转动,侧推块621施加在限位块624上的压力大于拉簧6264的拉力,侧推块621将料头切断;
38.第四步,气缸616驱动料带提升机构610复位,定位销613插入料带的导向孔内;
39.第五步,伺服减速电机627驱动传动轴628反向转动,凸轮一6291施加在从动轮一6253上的压力逐渐变小,凸轮二6292施加在从动轮二上的压力逐渐增大,侧推块621和限位块624均反向位移;在此过程中,当侧推块621和限位块624不与料带接触时,料带提升机构610将料带向上提升一个步距;
40.第六步,重复第一步至第五步。
41.料头侧推裁切机构620先将遮挡定位爪的料头侧向弯折,待最高处的定位爪被取走后,料头侧推裁切机构620再将多余的料头去除,料带导向机构630与料带提升机构610协同实现料带的自动上升走料,将新的料头和定位爪送至抓取高度,本实用新型的三个机构协同作用保证了定位爪安装机构能够顺利从指定高度取走定位爪。料头侧推裁切机构620与料带提升机构610公用一个伺服减速电机627,不仅简化了本实用新型的结构,还降低了本实用新型的制造成本。
42.定位爪组装装置700包括两轴位移平台710和定位爪夹持机构720,定位爪夹持机构720安装于两轴位移平台710的z轴;定位爪夹持机构720包括夹爪721、第一伺服电机722、推杆723和第二伺服电机724。参见图,夹爪721主要由三只爪部7211、开合导向件7212和限位外壳7213组成,开合导向件7212安装于限位外壳7213内,限位外壳7213内对应每一只爪部7211均设置有一个横向导槽,于横向导槽内各安装有一块滑块7214,爪部7211与滑块固定连接;开合导向件7212中对应每一只爪部7211均设置有一条导向斜槽7215,滑块通过凸台卡接于导向斜槽7215内。第一伺服电机722的输出轴与第一滚珠丝杆副725连接,第一滚珠丝杆副725中的移动件与开合导向件7212固连,第一伺服电机722驱动开合导向件7212上升,滑块在导向斜槽7215的作用下,沿横向导槽滑动,爪部7211向内聚拢形成一个圆形的包裹定位爪的抓取腔;第一伺服电机722驱动开合导向件7212下降,滑块在导向斜槽7215的作用下,沿横向导槽反向滑动,爪部7211向外散开松开定位爪。推杆723设置于开合导向件7212中,推杆723的侧壁等角度阵列有三根凸棱7231,爪部7211的内壁设置有与对应的凸棱7231适配的卡槽。第二伺服电机724的输出轴与第二滚珠丝杆副726连接,第二滚珠丝杆副726中的移动件与推杆723固连,在爪部7211向外散开松开定位爪之后,第二伺服电机724驱动推杆723下降,凸棱7231沿卡槽向下滑动,推针将定位爪推进底座的插孔内。
43.上述取料装入机构采用的将定位爪装入连接器底座中的方法为:
44.先用夹爪721竖直夹取定位爪;夹爪721行进使夹爪721的前端插入电连接的插孔内导正,然后夹爪721松开一点余量,夹爪721的外部与插孔的内壁贴合;推杆723向定位爪
方向行进,同时将定位爪推入底座的插孔内。
45.综上所述,本实用新型的有益效果是:
46.1.运用ccd视觉模组抓取底座中的定位爪安装孔的实际位置,定位爪组装装置根据ccd视觉模组的计算数据实时调整行进距离,保证了定位爪能准确地安装到底座中,提高了定位爪的安装精度;
47.2.料头侧推裁切机构先将遮挡定位爪的料头侧向弯折,待最高处的定位爪被取走后,料头侧推裁切机构再将多余的料头去除,料带导向机构与料带提升机构协同实现料带的自动上升走料,将新的料头和定位爪送至抓取高度,本实用新型的三个机构协同作用保证了定位爪安装机构能够顺利从指定高度取走定位爪;
48.3.通过在推杆上增加凸棱的方式,使得夹爪在抓取定位爪时能够内缩的更小,如此夹爪的前端可以插入底座的插孔内进行导向,在定位爪插入过程中,定位爪的侧壁与插孔的内壁之间始终保持有一定的间距,如此便可防止定位爪刮伤插孔内壁。
49.对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1