一种连续式激光焊接设备的制作方法
1.本技术涉及智能制造技术领域,尤其是涉及一种连续式激光焊接设备。
背景技术:
2.钻具基体生产过程中,需要进行大量的焊接工作,现有的焊接多为人工焊接或者半自动焊接,焊接过程中耗时长,生产效率偏低。
技术实现要素:
3.本技术实施例提供一种连续式激光焊接设备,可以提高钻具基体焊接时的生产效率。
4.本技术实施例的上述目的是通过以下技术方案得以实现的:
5.本技术实施例提供了一种连续式激光焊接设备,包括:
6.底座;
7.第一转轴,转动连接在底座上;
8.第一伺服驱动装置,设在底座上,用于驱动第一转轴转动;
9.转盘,设在第一转轴上;
10.多个转台,均匀设置在转盘上并与转盘转动连接;
11.升降装置,设在底座上;
12.第二转轴,转动连接在升降装置上;
13.第二伺服驱动装置,设在升降装置上,用于驱动第二转轴转动;
14.压盘,固定在第二转轴上;以及
15.激光焊机,设在底座上;
16.其中,在竖直方向上,压盘可以向靠近和远离转盘的方向移动。
17.在本技术实施例的一种可能的实现方式中,所述转台上设有定位孔。
18.在本技术实施例的一种可能的实现方式中,所述转台上设有定位台。
19.在本技术实施例的一种可能的实现方式中,所述压盘上设有定位锥形体;
20.定位锥形体的轴线与压盘的轴线在同一直线上;
21.在远离压盘的方向上,定位锥形体的截面积趋于减小。
附图说明
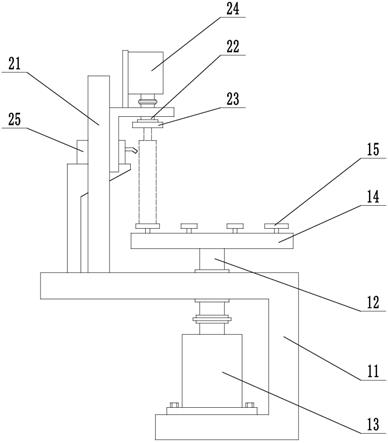
22.图1是本技术实施例提供的一种连续式激光焊接设备的主视图。
23.图2是本技术实施例提供的一种转台在转盘上的分布示意图。
24.图3是本技术实施例提供的一种转台的结构示意图。
25.图4是本技术实施例提供的另一种转台的结构示意图。
26.图5是本技术实施例提供的一种压盘的结构示意图。
27.图6是本技术实施例提供的一种控制器的结构示意框图。
28.图中,11、底座,12、第一转轴,13、第一伺服驱动装置,14、转盘,15、转台,21、升降装置,22、第二转轴,23、第二伺服驱动装置,24、压盘,25、激光焊机,151、定位孔,152、定位台,241、定位锥形体。
具体实施方式
29.以下结合附图,对本技术中的技术方案作进一步详细说明。
30.请参阅图1和图2,为本技术实施例公开的一种连续式激光焊接设备,该设备主要由底座11、第一转轴12、第一伺服驱动装置13、转盘14、转台15、升降装置21、第二转轴22、第二伺服驱动装置23、压盘24和激光焊机25等组成,第一转轴12转动连接在底座11上,其一端固定安装有转盘14,另一端与第一伺服驱动装置13连接,第一伺服驱动装置13固定安装在底座11上,其转轴连接在第一转轴12上,用于通过第一转轴12带动转盘14转动。
31.此处使用伺服驱动装置的目的是转盘14的转动需要精确定位,因为转盘14每次需要转动的角度是确定的,使用伺服驱动装置可以保证转盘14转动时的准确性。
32.转盘14上设置了多个转台15,转台15与转盘14的连接方式为转动连接,也就是在外力的作用下,转盘14上的转台15均可以自由转动。转台15的作用主要是放置需要焊接的钻具基体,随着转盘14的转动,每一个钻具基体都可以移动到指定位置。
33.在指定位置处,钻具基体可以转动,此时,焊缝与激光焊机25间的距离不会发生变化。
34.钻具基体在转台15的转动由升降装置21、第二转轴22和第二伺服驱动装置23等实现,其中,升降装置21固定安装在底座11上,第二转轴22和第二伺服驱动装置23均安装在升降装置21上,第二转轴22与升降装置21的连接方式为固定连接,第二伺服驱动装置23与升降装置21的连接方式为转动连接,第二伺服驱动装置23的转轴连接在第二转轴22上,用于带动第二转轴22转动。
35.第二转轴22上还安装有一个压盘24,压盘24与第二转轴22的连接方式为固定连接,能够随着第二转轴22的转动而转动,也能够随着升降装置21的升降而升降。
36.在一些可能的实现方式中,升降装置21使用线性移动模组,第二转轴22和第二伺服驱动装置23均安装在线性移动模组的工作台上。
37.工作过程中,压盘24首先向下移动,将需要焊接的钻具基体压住,然后第二伺服驱动装置23启动,通过第二转轴22和压盘24带动该钻具基体转动,钻具基体开始转动后,激光焊机25同步启动,对钻具基体进行焊接。
38.激光焊机25固定安装在底座11上。
39.整体而言,本技术实施例提供的连续式激光焊接设备,通过转动的转盘14将需要焊接的钻具基体连续不断的送到焊接位置,然后通过压盘24带动被压盘24压住的钻具基体转动,并同时进行焊接作业,整个过程自动进行,工作人员仅需要将需要焊接的钻具基体摆放在转盘14上。
40.整个焊接过程实现了高度的自动化,各工序之间的衔接顺畅,空挡时间少,自动化程度高,能够有效提高生产效率。
41.作为申请提供的连续式激光焊接设备的一种具体实施方式,对于钻具基体在转台15上的放置,增加了如下辅助方式,
42.请参阅图3,第一种,在转台15增加了定位孔151,放置时,将钻具基体的一端放到定位孔151内;
43.请参阅图4,第二种,在转台15增加了定位台152,放置时,将钻具基体的一端套在定位台152上。
44.这两种方式的目的都是降低操作难度,例如在人工放置时,工作人员可以根据定位孔151或者定位台152实现快速摆放。
45.请参阅图6,作为申请提供的连续式激光焊接设备的一种具体实施方式,在压盘24上增加了定位锥形体241,定位锥形体241的轴线与压盘24的轴线在同一直线上,并且,在远离压盘24的方向上,定位锥形体241的截面积是趋于减小的。
46.定位锥形体241的作用是方便对钻具基体进行再次定位,应理解,定位锥形体241较尖的一部分会插入到钻具基体上的孔内,在插入的过程中,钻具基体会发生轻微的晃动,该过程就是对钻具基体的再次定位,这样可以使参与焊接的钻具基体都基于同一个位置基准,有助于提高最终产品的一致性。
47.应理解,第一伺服驱动装置13、升降装置21、第二伺服驱动装置23和激光焊机25等都能够由一个控制器6进行控制,控制器6内存储有编译好的程序,生产过程中,第一伺服驱动装置13、升降装置21、第二伺服驱动装置23和激光焊机25等按照设定的程序工作,工作人员仅需要将需要焊接的钻具基体放置在转台上,并且在焊接完成后将其取下,就能够完成全部的焊接工作。
48.还应理解,上述内容中提到的控制器6,可以是一个cpu,微处理器,asic,或一个或多个用于控制上述内容的程序执行的集成电路。
49.控制器6主要有cpu601、ram602、rom603和系统总线604等组成,其中cpu601,ram602和rom603均连接在系统总线604上。
50.第一伺服驱动装置13和第二伺服驱动装置23分别由各自的伺服放大器控制,伺服放大器通过通讯电路连接在系统总线604上;升降装置21通过控制电路连接在系统总线604上;激光焊机25通过与之匹配的通讯电路连接在系统总线604上。
51.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1