工件加工辅助装置的制作方法
1.本技术涉及加工设备领域,具体涉及一种工件加工辅助装置。
背景技术:
2.工业中常用工件加工辅助装置夹取工件并传送工件,如何实现自动化程度高夹取工件和传送工件,提高工件加工效率,成为需要解决的技术问题。
技术实现要素:
3.本技术提供了一种能够提高工件加工效率的工件加工辅助装置。
4.本技术提供的一种工件加工辅助装置,包括:
5.上料机构,包括上料架及上料驱动组件,所述上料架包括多层上料支撑层,所述上料支撑层用于放置工件,所述上料驱动组件用于驱动所述上料架升降;
6.进料机构,所述进料机构的进料端连接所述上料机构的出料端;
7.进料传送机构,所述上料机构及所述进料机构上皆设有滑道,所述进料传送机构滑动连接所述滑道,所述进料传送机构用于将所述上料支撑层上的工件传送至所述进料机构上,及用于将所述进料机构上的工件传送至所述上料支撑层上;
8.加工机构,所述加工机构的进料端连接所述进料机构的出料端;及
9.加工传送机构,所述加工传送机构设于所述进料机构及所述加工机构上,所述加工传送机构用于将所述进料机构上的工件传送至所述加工机构或将所述加工机构上的工件传送至所述进料机构。
10.在一种可能的实施方式中,所述工件加工辅助装置还包括第一控制器,所述第一控制器用于控制上料驱动组件驱动所述上料架上的目标上料支撑层与所述进料机构对准,及控制所述进料传送机构将所述上料支撑层上的工件传送至所述进料机构,及控制所述加工传送机构将所述进料机构上的工件传送至所述加工机构,及控制所述加工传送机构将加工完毕的工件从所述加工机构传送至所述进料机构,及控制所述进料传送机构将所述工件从所述进料机构传送至所述目标上料支撑层;及控制所述上料架上升或下降,以使与所述目标上料支撑层相邻的上料支撑层与所述进料机构对准。
11.在一种可能的实施方式中,所述上料驱动组件包括上料驱动件、剪叉件及传力件;所述剪叉件包括交叉设置且转动连接的第一臂和第二臂;所述传力件包括运动件和连杆件,所述连杆件包括第一连杆和第二连杆,所述运动件连接于所述上料驱动件,所述第一连杆的两端分别转动连接于所述运动件和所述第一臂,所述第二连杆的两端分别转动连接于所述运动件和所述第二臂,所述运动件用于在所述上料驱动件的驱动下带动所述连杆件张开或闭合,所述连杆件用于在张开或闭合后带动所述剪叉件张开或闭合。
12.在一种可能的实施方式中,所述进料传送机构包括夹持组件及连接所述夹持组件的第一夹持驱动组件及第二夹持驱动组件,所述夹持组件包括座体、第一夹头和第二夹头,所述第一夹头与所述座体转动连接,所述第二夹头与所述座体转动连接或固定连接,所述
第一夹头的一端在所述第一夹持驱动组件的作用下靠近或远离所述第二夹头的一端,所述第二夹持驱动组件用于驱动所述夹持组件沿所述滑道移动。
13.在一种可能的实施方式中,所述进料机构包括第一工作台、设于所述第一工作台上的到位检测组件及第一顶起组件,所述到位检测组件用于检测是否具有所述工件;所述第一顶起组件的至少部分相对于所述第一工作台的台面伸缩,以顶起或释放所述工件;
14.所述加工机构包括第二工作台及设于所述第二工作台上的第二顶起组件,所述第二工作台的台面与所述第一工作台的台面相接,所述第二顶起组件的至少部分相对于所述第二工作台的台面伸缩,以顶起或释放所述工件;
15.所述加工传送机构包括至少一个夹具,所述夹具朝向所述第一工作台的台面设置,所述夹具用于夹取被所述第一顶起组件所顶起的所述工件,所述加工传送机构用于传送所述工件至所述第二工作台的台面,并将所述工件放置在第二顶起组件上。
16.在一种可能的实施方式中,所述加工传送机构包括夹板、气缸组件及转动驱动组件;所述夹板包括相背设置的第一面和第二面;所述气缸组件包括夹片模块、缸体及转动模块,所述缸体设于所述夹板的第一面,所述夹片模块的一端设于所述缸体内,所述夹片模块的另一端贯穿所述夹板并与所述第一面相对设置,所述夹片模块能够相对于所述缸体升降,用于与所述夹板形成夹具,以夹持待夹持物件或释放待夹持物件;所述转动模块的一端设于所述缸体内并与所述夹片模块在转动方向上相卡合,所述转动模块的另一端位于所述缸体外;所述转动驱动组件连接所述转动模块的另一端,用于驱动所述转动模块转动,以带动所述夹片模块转动至正对待夹持区或从正对待夹持区处移开,所述夹持区为放置所述待夹持物件的区域。
17.在一种可能的实施方式中,所述加工传送机构还包括升降驱动组件,所述升降驱动组件连接所述缸体,所述升降驱动组件用于改变所述缸体内的气压差,以驱动所述夹片模块沿所述缸体的轴向升降;所述工件加工辅助装置还包括第二控制器,所述第二控制器电连接所述升降驱动组件和所述转动驱动组件,所述第二控制器用于控制所述转动驱动组件驱动所述夹片模块的另一端转动至正对所述夹持区并控制所述升降驱动组件驱动所述夹片模块的另一端靠近所述夹板以夹持所述待夹持物件;所述第二控制器还用于控制所述升降驱动组件驱动所述夹片模块的另一端远离所述夹板以释放所述待夹持物件,及控制所述转动驱动组件驱动所述夹片模块的另一端移出正对所述夹持区的位置。
18.在一种可能的实施方式中,所述缸体具有沿轴向依次连通的第一通孔、缸体内腔及第二通孔;所述夹片模块包括缸杆及升降夹片,所述缸杆的一端设于所述缸体内腔中,所述缸杆的另一端经所述第一通孔伸出所述缸体并连接所述升降夹片,所述升降夹片与所述夹板的第一面相对;所述转动模块包括转动杆及转动片,所述转动杆的一端设于所述缸体内腔中,所述转动杆的另一端经所述第二通孔伸出所述缸体并连接所述转动片,所述转动片连接所述转动驱动组件,所述转动杆的一端与所述缸杆的一端在转动方向上相卡合,当所述转动驱动组件带动所述转动片及所述转动杆旋转时,所述转动杆带动所述缸杆旋转;
19.所述气缸组件还包括第一密封件及第二密封件,所述第一密封件密封于所述第一通孔的内壁与所述缸杆的外周面之间,所述第二密封件密封于所述第二通孔的内壁与所述转动杆的外周面之间。
20.在一种可能的实施方式中,所述夹片模块还包括活塞,所述活塞设于所述缸体内
腔,所述活塞套设于所述缸杆外围,所述活塞的外周面滑动连接所述缸体内腔的内周面,所述活塞带动所述缸杆沿所述缸体内腔的轴向移动;
21.所述缸体的周侧壁还设有第一通孔和第二通孔,所述第一通孔和所述第二通孔皆贯穿所述缸体的周侧壁,且连通所述缸体内腔,所述第一通孔和所述第二通孔在所述缸体内腔的轴向方向上分别位于所述活塞的相对两侧;所述升降驱动组件包括气压调节模块,所述气压调节模块连通所述第一通孔和所述第二通孔,所述气压调节模块用于对所述第一通孔或所述第二通孔供气,使所述活塞沿所述缸体内腔的轴向移动,以带动所述缸杆升降。
22.在一种可能的实施方式中,所述转动驱动组件还包括连接片、推杆及推杆气缸,所述连接片的一端转动连接所述转动片远离所述转动杆的一端,所述连接片的另一端固定连接所述推杆,所述推杆连接所述推杆气缸,所述推杆气缸用于推动所述推杆及所述连接片沿所述推杆的延伸方向移动,所述连接片带动所述转动片转动,以带动所述转动杆、所述缸杆及所述升降夹片转动;
23.所述连接片设有条形孔,所述条形孔的延伸方向与所述推杆的延伸方向相交或垂直,所述转动片远离所述转动杆的一端滑动连接所述条形孔的内壁。
24.本技术通过设置可自动升降的上料机构,可同时支持多个工件同步上升至进料机构的第一工作台的高度,为进料传送机构将工件传送至进料机构做准备,还支持多个工件同步回收至上料机构,在一层工件加工完毕后,上升至下一层的工件继续加工,如此循环,实现了自动化生成工序,提高了工件上料及回收的效率,节省上料时间和提高工件加工效率;通过设置进料传送机构及加工传送机构,实现对于工件的目标位置的准确传送,提高工件在传送过程中的自动化程度及提高工件的加工效率。
附图说明
25.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
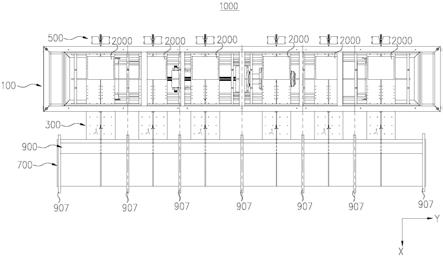
26.图1是本技术实施例提供的工件加工辅助装置的俯视图;
27.图2是图1所示的工件加工辅助装置的侧视图;
28.图3是图1所示的工件加工辅助装置传输工件的局部俯视图;
29.图4是图1所示的工件加工辅助装置上的工件的传输位置的局部俯视图;
30.图5为本技术一实施例提供的上料机构的部分电连接关系示意图;
31.图6为本技术又一实施例提供的上料机构的示意图;
32.图7为本技术另一实施例提供的上料机构的部分电连接关系示意图;
33.图8为本技术又一实施例提供的上料机构的示意图;
34.图9为本技术又一实施例提供的上料机构的局部示意图;
35.图10为本技术又一实施例提供的上料机构的部分电连接关系示意图;
36.图11为本技术实施例提供的上料驱动组件的示意图;
37.图12为本技术一实施例提供的升降结构的示意图;
38.图13为本技术实施例提供的升降结构的示意图一;
39.图14为本技术实施例提供的升降结构的示意图二;
40.图15为本技术实施例提供的升降结构的示意图三;
41.图16为本技术实施例提供的升降结构的示意图四;
42.图17为本技术实施例提供的升降结构的示意图五;
43.图18是图1所示的进料传送机构的结构示意图;
44.图19是图18所示的进料传送机构的爆炸图;
45.图20是图19所示的进料传送机构的局部结构示意图;
46.图21是图20所示的夹具组件的剖面图;
47.图22是图1所示的进料机构的俯视图;
48.图23是图1所示的进料机构的仰视图;
49.图24是本技术实施例提供的第一顶起组件的剖面图;
50.图25是图22所示的第二顶起组件沿a-a线的剖面图;
51.图26是图1所示的加工传送机构中的夹具的结构示意图;
52.图27是图3所示的上料传送机构的局部拆分示意图;
53.图28是图27所示的气缸组件的立体图;
54.图29是图28所示的第一种气缸组件的爆炸图;
55.图30是图1所示的上料传送机构的局部俯视图一;
56.图31是图28所示的第一种气缸组件在放松状态的剖面图;
57.图32是图28所示的第一种气缸组件在夹持状态的剖面图;
58.图33是图28所示的第二种气缸组件在夹持状态的剖面图;
59.图34是图33所示的气缸组件的局部示意图;
60.图35是图34所示的缸杆端部的结构示意图;
61.图36是图34所示的转动杆端部的结构示意图;
62.图37是图28所示的第三种气缸组件在夹持状态的剖面图;
63.图38是图1所示的上料传送机构的局部俯视图二;
64.图39是图1所示的上料传送机构的俯视图。
具体实施方式
65.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
66.本技术实施例的描述中,需要理解的是,术语“上方”、“上侧”、“下方”、“下侧”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是暗示或指示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
67.请参阅图1,本技术提供了一种工件加工辅助装置1000,工件2000包括但不限于线路板等等。
68.请参阅图1,工件加工辅助装置1000包括沿x轴正向依次排列的上料机构100、进料机构300及加工机构700。工件加工辅助装置1000还包括用于传送工件2000的进料传送机构
500及加工传送机构900。
69.请参阅图2,上料机构100包括上料架101及上料驱动组件103。所述上料架101包括沿z轴方向设置的多层上料支撑层105。所述上料支撑层105用于放置工件2000。每层上为沿y轴方向设置的一排放置位。可选的,一排放置位的数量为6个,当然,还可以为2个、4个、8个等等。
70.所述上料驱动组件103用于驱动所述上料架101升降。
71.请参阅图1,所述进料机构300的进料端连接所述上料机构100的出料端。
72.请参阅图1,所述上料机构100及所述进料机构300上皆设有相连通的滑道。所述进料传送机构500滑动连接所述滑道。所述进料传送机构500用于将所述上料支撑层105上的工件2000传送至所述进料机构300上,及用于将所述进料机构300上的工件2000传送至所述上料支撑层105上。
73.请参阅图1,所述加工机构700的进料端连接所述进料机构300的出料端。
74.请参阅图1,所述加工传送机构900设于所述进料机构300及所述加工机构700上。所述加工传送机构900用于将所述进料机构300上的工件2000传送至所述加工机构700或将所述加工机构700上的工件2000传送至所述进料机构300。
75.本实施例中,请参阅图3,进料机构300具有第一工作台301,加工机构700具有第二工作台303。第一工作台301的台面与第二工作台303的台面齐平。在上料驱动组件103的作用下,每层上料支撑层105的支撑面皆能够与第一工作台301的台面齐平。
76.其中,请参阅图3,上料支撑层105的支撑面上设有第一滑道107,第一工作台301的台面上设有第二滑道109,第二工作台303的台面上设有第三滑道111。其中,第一滑道107、第二滑道109及第三滑道111依次沿x正方向排列且连通。工件2000上设有至少一个滑柱2001,滑柱2001可沿第一滑道107、第二滑道109及第三滑道111,以使工件2000沿x方向移动。
77.请参阅图4,上料支撑层105用于放置工件2000,故定义上料支撑层105上放置工件2000的位置为放置位102。
78.请参阅图4,进料传送机构500用于将工件2000从放置位102传送至进料机构300的第一工作台301的台面,定义进料机构300放置工件2000的位置为等待位104。加工传送机构900用于将工件2000从等待位104传送至加工机构700上,定义加工机构700放置工件2000的位置为加工位106。
79.工件2000的移动过程为:上料架101在上料驱动组件103的作用下,顶层的上料支撑层105的支撑面与第一工作台301的台面齐平。进料传送机构500从上料架101远离进料机构300的一端将工件2000从放置位102传送至进料传送机构500上的等待位104。放下工件2000后,进料传送机构500回到上料架101远离进料机构300的一端。加工传送机构900将工件2000从等待位104传送至加工位106。放下工件2000后,加工传送机构900回到初始位置。在工件2000加工完成后,加工传送机构900来加工位106夹取工件2000并将工件2000送回至等待位104。在工件2000位于等待位104之后,进料传送机构500来到等待位104,并将工件2000传送至上料支撑层105的放置位102。如此实现了顶层的上料支撑层105的工件2000加工完成。以上为一层的工件2000的加工工序。可选的,当一层的工件2000为6个时,6个工件2000可同时进行加工,进而提高工件2000的加工效率。在顶层的工件2000加工完成后,上料
驱动组件103使上料架101上升一层,进行第二层的工件2000的加工,其过程与顶层的工件2000加工过程相同,在此不再一一赘述。
80.本技术通过设置可自动升降的上料机构100,可同时支持多个工件2000同步上升至进料机构300的第一工作台301的高度,为进料传送机构500将工件2000传送至进料机构300做准备,还支持多个工件2000同步回收至上料机构100,在一层工件2000加工完毕后,上升至下一层的工件2000继续加工,如此循环,实现了自动化生成工序,提高了工件2000上料及回收的效率,节省上料时间和提高工件2000加工效率;通过设置进料传送机构500及加工传送机构900,实现对于工件2000的目标位置的准确传送,提高工件2000在传送过程中的自动化程度及提高工件2000的加工效率。
81.可以理解的,请参阅图5,上料机构100包括检测组件113,检测组件113用于检测一层上料支撑层105上是否有工件2000。
82.请参照图5和图6,上料机构100还包括检测组件113,检测组件113包括第一传感器1131、第二传感器1132及处理器1133,处理器1133电连接于第一传感器1131和第二传感器1132。
83.其中,第一传感器1131位于上料架101的一侧,且与上料架101间隔设置,且固定设置,所谓的固定设置是指第一传感器1131并不跟随上料架101一起运动。进一步的,第一传感器1131与承载台架1011(结合参考图9)相对设置,且第一传感器1131的数量由承载台架1011的组数而定,即第一传感器1131的数量等同于承载台架1011的组数。当数量大于或等于2时,第一传感器1131与承载台架1011一一相对,且不同的第一传感器1131相对于不同的承载台架1011。每一个第一传感器1131用于检测与其相对应的承载台架1011上每个上料支撑层105上是否存在工件2000。第一传感器1131可以但不仅限于为红外传感器。
84.其中,第二传感器1132沿预设方向设置于上料架101的一侧,且固定设置,所谓的固定设置是指第二传感器1132至少部分固定在非承载装置的其他静止部件上。第二传感器1132为距离检测传感器,其用于实时获取上料架101的位置信息。可以理解的是,第二传感器1132的数量为1个即可实现上述功能。第二传感器1132可以但不仅限于为拉线编码器,拉线编码器包括拉线1135和功能体1136(如图6),功能体固定设置并不跟随上料架101运动,拉线1135的一端连接于功能体1136,拉线1135的另一端连接于上料架101,上料架101在预设方向上运动的过程中,拉线1135则会伸长,功能体1136从而可以获取到上料架101实时位置。在其他实施方式中,第二传感器1132也可以为与上料架101间隔设置的超声波传感器、红外传感器等可以测量距离的传感器。
85.具体检测原理为:第二传感器1132用于获取上料架101的位置信息并向处理器1133发送第一位置信号。处理器1133用于在接收到第一位置信号后产生第一控制信号。第一控制信号用于控制第一传感器1131检测上料支撑层105上是否存在工件2000。
86.可以理解的是,由于每组承载台中的多个上料支撑层105是间隔设置的,因此,承载于不同上料支撑层105上的工件2000也是间隔设置,仅有当工件2000运动到正对于第一传感器1131的位置时,第一传感器1131才能够检测当前上料支撑层105上是否存在工件2000。因此,第二传感器1132的作用则在于实时获得上料架101在运动过程中的位置数据并发送给处理器1133,而处理器1133的作用则用于实时判断上料架101的当前位置是否满足工件2000与第一传感器1131相正对的情况,若满足,则控制第一传感器1131开启检测。
87.可以理解的是,本实施方式的设置形式,一是可以节省电量,不用一直开启第一传感器1131,二是可以精确记录哪个承载上存在工件2000,哪个不存在工件2000,方便后续是否控制进料传送机构500是否动作做好准备。
88.请参照图7至图9,在另一种实施方式中,上料机构100还包括检测组件113,检测组件113包括第一传感器1131、第三传感器1134及处理器1133,处理器1133电连接于第一传感器1131和第三传感器1134。
89.其中,第一传感器1131位于上料架101的一侧,且与上料架101间隔设置,且固定设置,所谓的固定设置是指第一传感器1131并不跟随上料架101一起运动。进一步的,第一传感器1131与承载台架1011相对设置,且第一传感器1131的数量由承载台架1011的组数而定,即第一传感器1131的数量等同于承载台架1011的组数。当数量大于或等于2时,第一传感器1131与承载台架1011一一相对,且不同的第一传感器1131相对于不同的承载台架1011。每一个第一传感器1131用于检测与其相对应的承载台架1011上每个上料支撑层105上是否存在工件2000。第一传感器1131可以但不仅限于为红外传感器。
90.其中,第三传感器1134位于上料架101的一侧,且与上料架101间隔设置,且固定设置,所谓的固定设置是指第三传感器1134并不跟随上料架101一起运动。上料架101上沿预设方向设置有多个定位标识1021(图9)。定位标识1021可以但不仅限于为孔、槽、凸起等。第三传感器1134用于通过多个定位标识1021来获取上料架101的位置信息。可以理解的是,第三传感器1134的数量为1个即可实现上述功能。第三传感器1134可以但不仅限于为红外传感器、超声波传感器等。
91.定义同一组承载台架1011中相邻上料支撑层105之间的距离为第一距离。定义相邻定位标识1021之间的间隔距离为第二距离。第一距离和第二距离相等。由于定位标识1021是设置在上料架101上,上料架101移动多少距离,定位标识1021就移动相同的距离,因此可以通过检测标识的位置来获取上料架101的当前所在位置。
92.可选的,定位标识1021的数量与同一组承载台架1011上上料支撑层105的数量相同,且定位标识1021与上料支撑层105相对设置,且不同的定位标识1021相对于不同的上料支撑层105。
93.具体检测原理为:第三传感器1134用于通过多个定位标识1021来获取上料架101的位置信息并向处理器1133发送第一位置信号。处理器1133用于在接收到第一位置信号后产生第一控制信号。第一控制信号用于控制第一传感器1131检测上料支撑层105上是否存在工件2000。
94.如同上述实施方式所描述,由于每组承载台中的多个上料支撑层105是间隔设置的,因此,承载于不同上料支撑层105上的工件2000也是间隔设置,仅有当工件2000运动到正对于第一传感器1131的位置时,第一传感器1131才能够检测当前上料支撑层105上是否存在工件2000。因此,第三传感器1134的作用则在于实时获得上料架101在运动过程中的位置数据并发送给处理器1133,而处理器1133的作用则用于实时判断上料架101的当前位置是否满足工件2000与第一传感器1131相正对的情况,若满足,则控制第一传感器1131开启检测。
95.可以理解的是,本实施方式的设置形式,一是可以节省电量,不用一直开启第一传感器1131,二是可以精确记录哪个承载上存在工件2000,哪个不存在工件2000,方便后续是
否控制进料传送机构500是否动作做好准备。
96.需说明的是,上述两种检测实施方式中,第一传感器1131和处理器1133的作用都相同,第二传感器1132和第三传感器1134的作用也都是用于检测上料架101位置信息,不同的是第二传感器1132和第三传感器1134的布置位置不同,因而第二传感器1132和第三传感器1134的检测原理也不同。
97.请参照图10,结合上述任意一种检测实施方式,检测组件113中的第一传感器1131用于在检测到上料支撑层105上存在工件2000后向处理器1133发送确认信号。处理器1133还用于在接收到确认信号后产生第二控制信号。第二控制信号用于控制进料传送机构500夹持工件2000,并从上料架101的进料端运送到上料架101的出料端。若第一传感器1131检测到上料支撑层105上不存在工件2000,处理器1133则不需控制进料传送机构500执行夹持动作和运动动作,可以理解的是,该设置形式有利于节省电量,尤其是在批量化生产中。
98.需说明的是,工件2000的检测过程与工件2000的流转过程可以是分离进行,也可以是交叉进行。其中,分离进行是指,利用检测组件113对上料架101进行逐层检测,待整个上料架101检测完毕后,再利用进料传送机构500逐层将上料架101上的工件2000运转。其中,交叉进行是指,利用检测组件113检测上料架101的第一层,第一层检测完之后,随后则利用进料传送机构500将第一层上的工件2000运转,第一层运转完之后,然后再依次利用检测组件113检测第二层,进料传送机构500运转第二层,如此循环,直至最后一层进行完毕。
99.以上对应工件2000的检测不仅适用于在上料时还适用于将工件2000回收至上料架101时。
100.通过设置自动升降的上料机构100及在上料机构100上设置检测组件113,可有效地检测每一层的上料支撑层105上是否具有工件2000,减少工件2000漏放、工件2000的位置不对等等问题,提高工件2000上料和回收工件2000的准确度。
101.控制器电连接上料驱动组件103、进料传送机构500及加工传送机构900。所述控制器用于控制上料驱动组件103驱动所述上料架101上的目标上料支撑层105与所述进料机构300对准,及控制所述进料传送机构500将所述上料支撑层105上的工件2000传送至所述进料机构300,及控制所述加工传送机构900将所述进料机构300上的工件2000传送至所述加工机构700,及控制所述加工传送机构900将加工完毕的工件2000从所述加工机构700传送至所述进料机构300,及控制所述进料传送机构500将所述工件2000从所述进料机构300传送至所述目标上料支撑层105,及控制所述上料架101上升或下降,以使与所述目标上料支撑层105相邻的上料支撑层105与所述进料机构300对准。依次类推,实现将上料架101上每一层上料支撑层105上的工件2000皆传送至加工机构700,并回收至上料支撑层105。以上过程实现了工件加工辅助装置1000自动化地将上料架101上的每个工件2000有序地传送至加工机构700并回收,实现批量的工件2000的自动化加工,提高工件2000的加工效率。
102.以下结合附图对于上料驱动组件103的结构进行举例说明。
103.请参照图11,上料驱动组件103包括第一框架127、第二框架128以及以下任意实施例中所描述的升降结构129。其中,升降结构129承载于第一框架127。第二框架128承载于升降结构129,且可在举升机构的驱动下做往复运动(升降运动),在图11中,第二框架128往复运动的方向(升降方向)为z轴的正/负方向。第二框架128用于承载工件2000,并通过升降运动实现工件2000的运送。
104.请参照图11,升降结构129包括交叉设置且转动连接的第一臂1291和第二臂1292。
105.其中,第一臂1291的一端转动连接于第一框架127且固定在第一框架127上。第一臂1291的另一端活动连接于第二框架128。升降结构129在带动第二框架128升降的过程中,第一臂1291仅相对于第一框架127发生转动,同时,第一臂1291相对于第二框架128发生转动和平移运动。
106.其中,第二臂1292的一端转动连接于第二框架128且固定在第二框架128上。第二臂1292的另一端活动连接于第一框架127。升降结构129在带动第二框架128升降的过程中,第二臂1292仅相对于第二框架128发生转动,同时,第二臂1292相对于第一框架127发生转动和平移运动。
107.需说明的是,第一臂1291和第二臂1292上仅发生转动的部位位于升降结构129的同一端,或者说第一臂1291和第二臂1292上同时发生转动和平移运动的部位位于升降结构129的同一端。在图11中,第一虚线圈q1内的第一臂1291和第二臂1292同时发生转动和平移运动,第二虚线圈q2内的第一臂1291和第二臂1292仅发生转动。
108.请参照图12,升降结构129还包括第一滚动体1293和第二滚动体1290。第一滚动体1293转动连接于第一臂1291的一端。第二滚动体1290转动连接于第二臂1292的一端。第一滚动体1293和第二滚动体1290位于剪叉件130(图13)的同一侧。
109.其中,第一滚动体1293滚动连接上述第二框架128,即第一滚动体1293位于第一臂1291上同时发生转动和平移运动的一端,在升降结构129在带动第二框架128升降的过程中,第一滚动体1293在第二框架128上滚动,从而实现第一臂1291相对于第二框架128发生转动和平移运动。
110.其中,第二滚动体1290滚动连接上述第一框架127,即第二滚动体1290位于第二臂1292上同时发生转动和平移运动的一端,在升降结构129在带动第一框架127升降的过程中,第二滚动体1290在第一框架127上滚动,从而实现第二臂1292相对于第一框架127发生转动和平移运动。
111.可以理解的是,设置第一滚动体1293和第二滚动体1290,可以减小第一臂1291和第二臂1292作平移运动的阻力,使得第二框架128能够平稳顺利的升降。
112.下面结合附图详细介绍上述上料驱动组件103中的升降结构129。
113.请参照图13,本技术还提供一种升降结构129,升降结构129包括:上料驱动件132、剪叉件130及传力件131。
114.剪叉件130包括交叉设置且转动连接的第一臂1291和第二臂1292,即该剪叉件130的呈剪刀形式。剪叉件130具有第一升降角α1,第一升降角α1由第一臂1291和第二臂1292在同一平面(x-z平面)上的正投影所成的夹角。第一臂1291和第二臂1292在相对转动的过程中,第一升降角α1的大小会发生变化,剪叉件130在z轴方向上的尺寸随之发生变化。当第一升降角α1张开时(第一升降角α1变大),剪叉件130在z轴方向上的尺寸增大,从而实现将上述第二框架128举升;当第一升降角α1闭合时(第一升降角α1变小),剪叉件130在z轴方向上的尺寸减小,从而实现将上述第二框架128收回。
115.可选的,第一臂1291与第二臂1292间隔设置,可以理解的是,间隔设置可以避免第一臂1291和第二臂1292之间产生摩擦,从而有利于第一臂1291和第二臂1292的相对转动。
116.传力件131包括运动件134和连杆件133。连杆件133包括间隔设置的第一连杆1331
和第二连杆1332。其中,运动件134连接于上料驱动件132。第一连杆1331的两端分别转动连接于运动件134和第一臂1291。第二连杆1332的两端分别转动连接于运动件134和第二臂1292。
117.连杆件133具有第二升降角α2,第二升降角α2由第一连杆1331和第二连杆1332在同一平面(x-z平面)上的正投影所成的夹角。第一连杆1331和第二连杆1332在相对转动的过程中,第二升降角α2的大小会发生变化。当第二升降角α2张开时(第二升降角α2变大),连杆件133促使第一升降角α1张开;当第二升降角α2闭合时(第二升降角α2变小),连杆件133促使第一升降角α1闭合。
118.因此,运动件134用于在上料驱动件132的驱动下带动连杆件133的第二升降角α2张开或闭合。连杆件133用于在第二升降角α2张开或闭合后带动剪叉件130张开或闭合,进而实现上述第二框架128的升降运动。
119.下面从另一个角度来说明升降结构129的升降原理,为便于说明作以下定义:第一连杆1331和第一臂1291转动连接处的中心轴为o1;第二连杆1332和第二臂1292转动连接处的中心轴为o2;第一臂1291和第二臂1292转动连接处的中心轴为o3。
120.当运动件134往y轴负方向运动时,第一连杆1331促使第一臂1291绕o3顺时针转动,且第二连杆1332促使第二臂1292绕o3逆时针转动,也就是说,o1和o2相互远离,从而使得剪叉件130在z轴方向上的尺寸增大,进而实现将上述第二框架128举升。
121.当运动件134往y轴正方向运动时,第一连杆1331促使第一臂1291绕o3逆时针转动,且第二连杆1332促使第二臂1292绕o3顺时针转动,也就是说,o1和o2相互靠近,从而使得剪叉件130在z轴方向上的尺寸减小,进而实现将上述第二框架128收回。
122.综上,本技术提供的升降结构129包括了上料驱动件132、剪叉件130及传力件131,其中,上料驱动件132连接于传力件131,并可驱动传力件131中的运动件134,运动件134从而带动连杆件133张开或闭合,最后通过连杆件133带动剪叉件130张开或闭合,实现升级机构的升降功能,可以理解的是,升降结构129应用在生产领域中可以提高生产效率。
123.请参照图14,第一臂1291具有第一连接部a。第二臂1292具有第二连接部b。运动件134具有第三连接部c和第四连接部d。其中,第一连接部a相较于第二连接部b更临近于第三连接部c。第二连接部b相较于第一连接部a更邻近于第四连接部d。或者说,在升降方向上,第一连接部a的所在位置在第二连接部b的所在位置之上,第三连接部c的所在位置在第四连接部d的所在位置之上。
124.进一步的,第一连杆1331的两端分别连接于第一连接部a和第四连接部d。第二连杆1332的两端分别连接于第二连接部b和第三连接部c。换而言之,第一连杆1331和第二连杆1332为交叉设置,而交叉设置可以使得上料驱动件132驱动升降结构129实现升降效果所需要的驱动力更小,从而可以节省电量。
125.下面说明上述省力原理:由前面的描述可知,升降结构129的升降效果通过第一臂1291的转动来实现,而第一臂1291的转动又需要通过第一连杆1331绕o1转动来实现,换而言之,第一连杆1331发生转动,则升降结构129实现升降效果。若将第一连杆1331连接在运动件134的第三连接部c,则运动件134施加在第一连杆1331上的第一作用力几乎平行于第一连杆1331,此时驱动第一连杆1331转动的力臂较小,因此需要较大的第一作用力才能使得第一连杆1331转动。而将第一连杆1331连接在运动件134的第四连接部d,相较于将第一
连杆1331连接在运动件134的第三连接部c而言,第一作用力与第一连杆1331形成的角度更大,此时驱动第一连杆1331转动的力臂更大,因此使用较小的第一作用力即可使得第一连杆1331转动。同理,升降结构129的升降效果需要第二连杆1332的转动来实现,若将第二连杆1332连接在运动件134的第四连接部d,则运动件134施加在第二连杆1332上的第二作用力几乎平行于第二连杆1332,此时驱动第二连杆1332转动的力臂较小,因此需要较大的第二作用力才能使得第二连杆1332转动。而将第二连杆1332连接在运动件134的第三连接部c,相较于将第二连杆1332连接在运动件134的第四连接部d而言,第二作用力与第二连杆1332形成的角度更大,此时驱动第二连杆1332转动的力臂更大,因此使用较小的第二作用力即可使得第二连杆1332转动。
126.请参照图14,剪叉件130具有铰接部e,铰接部e为第一臂1291和第二臂1292转动连接的部位。第一臂1291具有远离铰接部e的第一端部f。第一连接部a位于第一端部f和铰接部e之间。第二臂1292具有远离铰接部e的第二端部g。第二连接部b位于第二端部g和铰接部e之间。
127.可以理解的是,升降结构129在升降的过程中,第一臂1291和第二臂1292上的各部位均围绕铰接部e旋转,而第一臂1291和第二臂1292上距离铰接部e越远的位置处的线速度越大,因此,在z轴方向上,第一臂1291和第二臂1292上距离铰接部e越远的位置处的位移量越大。在本实施例中,将第一连接部a设置于第一端部f和铰接部e之间,因此,在z轴方向上,第一端部f相较于第一连接部a的位移量更大,换而言之,第一连接部a只需较小的位移量就能够使得第一端部f产生较大的位移量,且第一连接部a越靠近铰接部e,第一连接部a所需的位移量更小。本实施例的设置形式,相较于将第一连接部a设置在第一端部f而言,传力件131的运动空间更小,从而可以将传力件131的尺寸设置的更小,进而可以节省空间占用以及升降结构129的重量。第二连接部b与第一连接部a同理,在此不再赘述。
128.请参照图15,剪叉件130还包括加强件1301,加强件1301连接于第一臂1291,且邻近于第一连接部a。可以理解的是,升降结构129在升降的过程中,第一连接部a需要受到来自第一连杆1331的作用力才会转动,因此,第一连接部a为受力部位。本实施例中中的加强件1301邻近于第一连接部a设置,从而可以增加第一连接部a及其附近位置的机械强度,从而提高升降结构129的使用寿命。
129.请参照图15,上料驱动件132包括相连接的动力源1321和传动件1322。动力源1321用于驱动传动件1322运动。传动件1322用于在动力源1321的驱动下带动运动件134靠近或远离动力源1321。
130.在一种实施方式中,请参照图15,传动件1322具有外螺纹。运动件134具有贯穿运动件134的相对两侧的螺纹孔k1。传动件1322穿设于贯穿孔内,且通过螺纹孔k1配合连接于传动件1322。传动件1322用于在动力源1321的驱动下转动,以带动运动件134靠近或远离动力源1321。具体的,动力源1321为电机,电机的输出轴连接于传动件1322的一端。运动件134套设于传动件1322上,且通过螺纹孔k1与传动件1322上的外螺纹相配合。当动力源1321开启时,传动件1322跟随输出轴旋转,运动件134随之在传动件1322上作平移运动,即运动件134靠近或远离动力源1321。
131.在另一种实施方式中,上述动力源1321也可以替换为液压缸,上述传动件1322相应的替换为液压杆。传动件1322的一端活动连接于液压缸,传动件1322的另一端固连于运
动件134。当往液压缸内冲入压力液体时,传动件1322被推动,从而带动运动件134作往复运动,即运动件134靠近或远离动力源1321。
132.可以理解的是,还存在其他实施方式可以实现运动件134靠近或远离动力源1321,在此不一一例举。
133.请参照图15,上料驱动件132还包括承载座1323和连接件1324。承载座1323转动连接于铰接部e。连接件1324的一端连接于承载座1323,连接件1324的另一端连接于动力源1321,也就是说,上料驱动件132通过承载座1323承载于铰接部e。
134.可以理解的是,剪叉件130上除了铰接部e的任意位置处受到外力都将形成力矩,而该力矩会对第一臂1291或者第二臂1292的转动造成影响。本实施例中,上料驱动件132通过承载座1323间接的承载于铰接部e,从而使得上料驱动件132的自身重力经过铰接部e,由于铰接部e为剪叉件130的转动中心,上料驱动件132的自身重力对于剪叉件130而言则不会形成转矩,从而不会对第一臂1291或者第二臂1292的转动造成影响,换而言之,也就确保了第一臂1291和第二臂1292能够平稳转动。而且,本实施例中,承载座1323与铰接部e为转动连接,而非将承载座1323固定在第一臂1291或者第二臂1292上,换而言之,上料驱动件132不会跟随第一臂1291或第二臂1292转动,从而可以确保运动件134与连杆件133处于可相互运动的状态,使得升降结构129的升降效果得以持续实现。
135.承载座1323上具有通孔k2,通孔k2贯穿承载座1323的相背两侧。传动件1322穿设于通孔k2内。通孔k2内还设置有轴承,轴承套设在传动件1322上,轴承用于实现传动件1322相对于承载座1323旋转。可以理解的是,上述通孔k2的设置可以避免传动件1322在通孔k2的径向方向窜动,从而确保升降结构129的能够平稳顺利的实现升降。
136.请参照图16,剪叉件130还包括交叉设置且转动连接的第三臂1302和第四臂1303。
137.其中,第三臂1302与第一臂1291相对设置。剪叉件130还包括第一固定轴1304和第二固定轴1305。第一固定轴1304连接于第一臂1291和第三臂1302的一端。第二固定轴1305连接于第一臂1291和第三臂1302的另一端。升降结构129在进行升降运动的过程中,第一臂1291和第三臂1302通过第一固定轴1304和第二固定轴1305实现同步运动。可选的,升降结构129还包括第一板1294和第二板1295,第一板1294连接于第一臂1291和第三臂1302且邻近于第一固定轴1304。第二板1295连接于第一臂1291和第三臂1302且邻近于第二固定轴1305。可以理解的是,第一板1294和第二板1295可以增加第一臂1291、第三臂1302、第一固定轴1304及第二固定轴1305之间的连接稳定性,从而进一步确保第一臂1291和第三臂1302能够同步运动。
138.其中,第四臂1303与第二臂1292相对设置。剪叉件130还包括第三固定轴1306。第三固定轴1306连接于第二臂1292和第四臂1303的一端。升降结构129在进行升降运动的过程中,第二臂1292和第四臂1303通过第三固定轴1306实现同步运动。可选的,升降结构129还包括第三板1296和第四板1297,第三板1296连接于第二臂1292和第四臂1303且邻近于第三固定轴1306。第四板1297连接于第二臂1292和第四臂1303且邻近于第二固定轴1305。可以理解的是,第三板1296和第四板1297可以增加第二臂1292、第四臂1303及第三固定轴1306之间的连接稳定性,从而进一步确保第二臂1292和第四臂1303能够同步运动。
139.请参照图17,连杆件133还包括间隔设置的第三连杆1333、第四连杆1334、第一连接轴1315及第二连接轴1316。
140.其中,第三连杆1333与第一连杆1331相对设置。第一连杆1331和第三连杆1333的一端连接于第一连接轴1315。第一连接轴1315连接于第一臂1291和第三臂1302。第一连杆1331和第三连杆1333的另一端连接于运动件134的相背两侧。
141.其中,第四连杆1334与第二连杆1332相对设置。第二连杆1332和第四连杆1334的一端连接于第二连接轴1316。第二连接轴1316连接于第二臂1292和第四臂1303。第二连杆1332和第四连杆1334的另一端连接于运动件134的相背两侧。
142.第二臂1292和第四臂1303间隔而形成容置空间k3。传力件131和上料驱动件132至少部分位于容置空间k3内。可以理解的是,如此设置提高了空间利用率,充分合理的利用了空间,而且,在该设置形式中,剪叉件130还可以起到保护传力件131和上料驱动件132的作用,从而可以在一定程度上提高使用寿命。
143.以下结合附图对于进料传送机构500的结构进行举例说明。
144.请参阅图18及图19,所述进料传送机构500包括夹持组件501及连接所述夹持组件501的第一夹持驱动组件503(请参阅图21)及第二夹持驱动组件505。所述夹持组件501包括座体507、第一夹头509和第二夹头511。所述第一夹头509与所述座体507转动连接。所述第二夹头511与所述座体507转动连接或固定连接。本实施例中,第二夹头511与座体507固定连接。所述第一夹头509的一端在所述第一夹持驱动组件503的作用下靠近或远离所述第二夹头511的一端。所述第二夹持驱动组件505用于驱动所述夹持组件501沿所述滑道(第一滑道107和第二滑道109)移动,从而实现将工件2000传送至等待位104。
145.通过设置进料传送机构500包括夹持组件501、第一夹持驱动组件503和第二夹持驱动组件505,第一夹头509和第二夹头511可以协同作用以夹持工件2000,同时,夹持组件501与第二夹持驱动组件505相连接,且可以被第二夹持驱动组件505驱动,因此,在夹持组件501对工件2000完成夹持过程后,就可以在第二夹持驱动组件505的驱动下运动,从而实现转到目标工位,进而提高生产效率。
146.请参照图18,进料传送机构500还包括运动结构513。所述运动结构513包括第一子结构515和第二子结构517。所述第一子结构515和所述第二子结构517分别连接于所述夹持组件501的相背两端,且用于承载所述夹持组件501在上料支撑层105上运动。可以理解的是,将第一子结构515和第二子结构517安装在夹持组件501两端,可以增加夹持组件501的跨度,从而提高进料传送机构500的运动平稳性,保障工件2000被准确的被传送到目标工位上。
147.需说明的是,所述第二夹持驱动组件505可以直接连接于运动结构513,也可以直接连接于夹持组件501,还可以同时直接连接于运动结构513和夹持组件501,本技术对此不做限定。
148.可选的,第二夹持驱动组件505包括但不限于电机和单向弯曲链条。单向弯曲链条的一端连接电机,另一端连接运动结构513。由于单向弯曲链条只能朝向内侧弯折,而无法朝向外侧弯折,所以将单向弯曲链条的外侧背向上料支撑层105的支撑面。在电机驱动单向弯曲链条朝向x轴正向运动时,单向弯曲链条伸长并形成类似支撑杆的结构,如此,能够推动运动结构513沿x轴正向运动。当电极驱动单向弯曲链条朝向x轴反向运动时,单向弯曲链条逐渐收回,以带动运动结构513沿x轴反向运动,且单向弯曲链条在收回时具有柔性,可任意弯折,占据的空间小。
149.请参阅图19,所述第一子结构515包括相连接的第一载体架515a和第一走轮515b。所述第一载体架515a连接于所述座体507。所述第一走轮515b转动连接于所述第一载体架515a,即第一走轮515b可转动的设置在第一载体架515a上。第一走轮515b的数量可以为2个、3个、5个、7个等,本技术对此不做限定。
150.所述第二子结构517包括相连接的第二载体架517a和第二走轮517b。所述第二载体架517a连接于所述座体507。所述第二走轮517b转动连接于所述第二载体架517a,即第二走轮517b可转动的设置在第二载体架517a上。第二走轮517b的数量可以为2个、3个、5个、7个等,本技术对此不做限定。
151.第一走轮515b和第二走轮517b可以但不仅限于为轴承、万向轮、单向轮等。第一走轮515b和第二走轮517b均用于实现进料传送机构500在传送台上运动。可以理解的是,相较于不设置走轮而言,设置走轮可以减小促使进料传送机构500的传送台上的运动驱动力,从而更省电,同时,走轮在运动过程中为滚动摩擦,因此,磨损量较小,有利于长期使用。
152.请参照图20,所述第一夹头509转动连接于所述座体507,第一夹头509可通过连接于座体507上的轴段510实现与座体507实现转动连接。所述第二夹头511固连于所述座体507。所述第一夹头509具有用于夹持工件2000的第一夹持端a1,所述第二夹头511具有用于夹持工件2000的第二夹持端a2。进料传送机构500具有夹持状态和非夹持状态,当进料传送机构500处于夹持状态时,第一夹持端a1和第二夹持端a2的距离为第一距离。当进料传送机构500处于非夹持状态时,第一夹持端a1和第二夹持端a2的距离为第二距离,所述第一距离小于第二距离。
153.进一步的,第二夹头511的部分设于第一滑道107内。第一滑道107为夹持组件501的导向,以使夹持组件501夹持工件2000后沿第一滑道107运动。可以理解的是,夹持着工件2000的进料传送机构500在上料支撑层105上运动的过程中,需要确保进料传送机构500的运动不能偏离目标路径,否则可能导致工件2000不能够准确的被传送到目标工位上。而在本实施方式中,进料传送机构500的第二夹头511至少部分容置于上料支撑层105形成的第一滑道107内,从而可以通过上料支撑层105来限制第二夹头511的运动,进而达到防止进料传送机构500偏离目标路径的目的,确保将工件2000被准确的传送到目标工位上。
154.请参照图21,所述第一夹持驱动组件503连接于所述第一夹头509。所述第一夹持驱动组件503用于驱动所述第一夹头509转动,以使得所述第一夹头509的第一夹持端a1靠近所述第二夹头511的第二夹持端a2。
155.如图21所示,所述第一夹持驱动组件503包括第一活塞,第一活塞抵接于第一夹头509上远离第一夹持端a1的另一端并进行驱动,使得第一夹头509的第一夹持端a1向第二夹头511的第二夹持端a2靠近。具体的,第一夹头509通过轴段510转动连接于座体507。所述座体507具有收容腔b1和第一通孔b2。所述第一夹持驱动组件503收容于所述收容腔b1内。所述第一通孔b2连通所述收容腔b1且用于将流体导入至所述收容腔b1内。所述第一夹头509上远离第一夹持端a1的部分容置于所述收容腔b1内并连接于所述第一夹持驱动组件503。所述第一夹持驱动组件503用于在所述流体的作用下在所述收容腔b1内移动并带动所述第一夹头509转动,以使得所述第一夹头509远离所述第一夹持驱动组件503的一端靠近所述第二夹头511。换而言之,当往收容腔b1内通入流体时,收容腔b1内的压力不断上升,从而促使第一活塞运动而顶压第一夹头509上远离第一夹持端a1的部分,第一夹头509从而会转
动,第一夹持端a1则在转动过程中逐渐向第二夹头511的第二夹持端a2靠拢,最终实现夹持操作。其中,所述流体可以为气体(气压驱动),也可以为液体(液压驱动),在此不做限定。
156.当然,还存在其它可行的实施方式,在此不一一详述。
157.请参照图21,夹持组件501还包括弹性件521。所述弹性件521可以但不仅限于为弹簧。所述弹性件521的相背两端分别抵接于所述第一夹头509和所述座体507。所述弹性件521用于向所述第一夹头509提供朝向背离所述第二夹头511方向的弹性力,也就是说,在当进料传送机构500处于夹持状态时,弹性件521处于压缩状态,该弹性件521用于向进料传送机构500提供由夹持状态转换到非夹持状态的作用力。具体的,在进料传送机构500将工件2000夹持到目标工位后,需要释放工件2000,此时则需要松开第一夹头509和第二夹头511。具体的实现原理为:减小收容腔b1内的流体压力,使得弹性件521对第一夹头509施加的转矩大于第一夹持驱动组件503对第一夹头509的转矩,第一夹头509则逆向转动,即第一夹头509的第一夹持端a1往背离第二夹头511的第二夹持端a2的方向运动,从而实现释放工件2000。
158.可以理解的是,弹性件521可以迫使第一夹头509的第一夹持端a1和第二夹头511的第二夹持端a2张开为一个较大的角度,也就是说,第一夹持端a1和第二夹持端a2之间的间隔空间较大,而较大间隔空间有利于下一次夹持工件2000。
159.请参照图21,所述第一夹头509具有第一凹槽b3。所述座体507具有第二凹槽b4,所述第一凹槽b3和第二凹槽b4相对设置。所述弹性件521设置于所述第一凹槽b3和所述第二凹槽b4内。其中,第一凹槽b3和第二凹槽b4的形状可以但不仅限于为圆形凹槽、椭圆形凹槽等,具体应依据弹性件521的形状而定。可以理解的是,将弹性件521设置在第一凹槽b3和第二凹槽b4的设置,从而可以确保弹性件521在伸缩过程中不会从进料传送机构500上脱落下来,有利于夹持操作的持续进行。
160.请参照图20,所述座体507具有安装孔b5,所述安装孔b5可以插入连接件(比如螺栓),第一子结构515和第二子结构517可以通过一个或多个连接件实现与座体507固定连接。
161.可选的,安装孔b5的数量为多个,所谓的多个是指数量大于或等于两个,具体可以但不仅限于为2个、3个、5个等。第一子结构515和第二子结构517可以通过多个安装孔b5中的任意一个实现固定在所述座体507上。可以理解的是,设置多个安装孔b5,从而可以调节座体507与运动结构513的相对位置。进一步可选的,所述多个安装孔b5的布置方向平行于所述第一夹头509指向第二夹头511的方向,即多个安装孔b5设置于座体507的不同高度上,从而可以适配于夹持不同高度位置处的工件2000。
162.可选的,所述安装孔b5贯穿所述座体507的相背两侧,第一子结构515和第二子结构517共用一个安装孔b5,即一个安装孔b5则可以实现同时固定第一子结构515和第二子结构517,如此设置从而可以减少安装孔b5的开孔数量进而减少开孔时间。
163.以下结合附图对于进料机构300的结构进行举例说明。
164.请参阅图22及图23,所述进料机构300包括第一工作台301、设于所述第一工作台301上的到位检测组件305及第一顶起组件307。所述到位检测组件305用于检测是否具有所述工件2000。所述第一顶起组件307的至少部分相对于所述第一工作台301的台面伸缩,以顶起或释放所述工件2000。可选的,第一顶起组件307位于等待位104。
165.具体的,请参阅图23,第一工作台301为水平设置的台板。第一工作台301的台面为台板的顶面。到位检测组件305设于台板的底面。到位检测组件305包括转动压片308及感应器309。转动压片308的一端对应于第一滑道107设置,转动压片308的另一端与感应器309相对且间隔设置。
166.转动压片308的中间段转动连接第一工作台301。当工件2000被传送至等待位104时,工件2000的滑柱2001抵接转动压片308的一端,推动转动压片308转动,转动压片308的另一端抵接至感应器309。可选的,感应器309为压力传感器。感应器309感应转动压片308的另一端的撞击而检测到工件2000已到达等待位104。感应器309电连接控制器,控制器在接收到感应器309的感应信号后将控制所述进料传送机构500并回到初始位置,及控制加工传送机构900夹取工件2000并传送工件2000。
167.进一步地,转动压片308呈弧形。工件2000的滑柱2001抵接转动压片308的外弧面,工件2000的滑柱2001继续向前移动的过程中沿转动压片308的外弧面滑动,如此,使得转动压片308不会妨碍到工件2000的移动又能够准确地检测到工件2000是否到等待位104。
168.请参阅图24,所述第一顶起组件307包括第一顶起驱动组件311及第一顶杆313。所述第一顶杆313贯穿所述第一工作台301的台面。所述第一顶杆313在所述第一顶起驱动组件311的作用下伸出所述第一工作台301的台面或缩回至所述第一工作台301的台面下。具体的,第一工作台301的台面为水平设置的第一台板的顶面形成,第一顶起驱动组件311设于第一台板的底面。第一台板设有第二通孔315。第一顶杆313沿z轴方向设置,并至少部分设于第二通孔315内。第一顶起驱动组件311包括但不限于为气缸。第一顶起驱动组件311能够驱动第一顶杆313沿z轴方向伸缩,以使第一顶杆313经第二通孔315伸出第一台板的顶面,或缩回至低于第一台板的顶面。
169.可以理解的,第一顶起组件307的数量为两个,两个第一顶起组件307分别设于第一滑道107的两侧,以同时顶起工件2000和放下工件2000。
170.请参阅图25,所述加工机构700包括第二工作台303及设于所述第二工作台303上的第二顶起组件317。所述第二工作台303的台面与所述第一工作台301的台面相接。所述第二顶起组件317的至少部分相对于所述第二工作台303的台面伸缩,以顶起或释放所述工件2000。可选的,第二顶起组件317位于加工位106。
171.请参阅图25,所述第二顶起组件317包括第二顶起驱动组件319及第二顶杆321。所述第二顶杆321贯穿所述第二工作台303的台面。所述第二顶杆321在所述第二顶起驱动组件319的作用下伸出所述第二工作台303的台面或缩回至所述第二工作台303的台面下。具体的,第二工作台303的台面为水平设置的第二台板的顶面形成,第二顶起驱动组件319设于第二台板的底面。第二台板设有第三通孔322。第二顶杆321沿z轴方向设置,并至少部分设于第三通孔322内。第二顶起驱动组件319包括但不限于为气缸。第二顶起驱动组件319能够驱动第二顶杆321沿z轴方向伸缩,以使第二顶杆321经第三通孔322伸出第二台板的顶面,或缩回至低于第二台板的顶面。
172.第二顶起组件317的数量为两个,两个第二顶起组件317分别设于第二滑道109的相对两侧。
173.请参阅图26,所述加工传送机构900包括至少一个夹具901。所述夹具901朝向所述第一工作台301的台面设置。所述夹具901用于夹取被所述第一顶起组件307所顶起的所述
工件2000。所述加工传送机构900用于传送所述工件2000至所述第二工作台303的台面,并将所述工件2000放置在第二顶起组件317上。随后,第二顶起组件317回缩,以使工件2000放置于第二工作台303的台面上,在工件2000加工完成后。第二顶起组件317将工件2000顶起,以便于加工传送机构900的夹具901夹取工件2000,并将工件2000送回至进料机构300的等待位104上,等待位104上的第一顶起机构顶起工件2000,加工传送机构900的夹具901移出,等待位104上的第一顶起机构缩回,工件2000位于等待位104上。上料传送机构再将工件2000送回至上料架101的上料支撑层105上。
174.以下结合附图对于所述加工传送机构900的结构进行举例说明。
175.请参阅图26,加工传送机构900还包括夹取驱动组件903及传送驱动组件(未图示)。所述夹取驱动组件903用于驱动所述夹具901夹取或释放所述工件2000。夹取驱动组件903、夹具901在后续进行具体的介绍。所述传送驱动组件用于驱动所述夹具901移动。
176.具体的,请参阅图1,在第一工作台301和第二工作台303的台面上可设置多个沿x轴方向延伸的支撑轨道907。夹具901沿y轴方向的两端分别滑动连接两个支撑轨道907。支撑轨道907一方面用于使夹具901悬挂在第一工作台301和第二工作台303的台面上,且可有效地控制夹具901在z轴方向的位置;另一方面能够作为夹具901沿y轴运动导向。传送驱动组件包括但不限于为电机及传送带的组合、电机及链条的组合等等。传送驱动组件用于推动夹具901沿支撑轨道907移动,以使夹具901能够在进料机构300与加工机构700之间往返运动。
177.当然,在其他实施方式中,传送驱动组件包括电机及单向弯曲链条。单向弯曲链条的一端连接电机,另一端连接夹具901。由于单向弯曲链条只能朝向内侧弯折,而无法朝向外侧弯折,所以将单向弯曲链条的外侧朝向第二工作台303的台面。在电机驱动单向弯曲链条朝向x轴正向运动时,单向弯曲链条伸长并形成类似支撑杆的结构,如此,能够推动夹具901沿x轴运动。
178.加工传送机构900包括多个夹具901。例如包括3个夹具901。每个夹具901可以同时传送多个工件2000,例如同时传送2个工件2000。加工传送机构900一次可以传送6个工件2000,极大地增加了工件2000的加工效率,提高自动化程度。传送驱动组件的数量为多个,多个传送组件同时驱动多个夹具901同步沿x轴运动。
179.所述控制器电连接所述第一顶起驱动组件311、第二顶起驱动组件319、所述夹取驱动组件903及所述传送驱动组件。当工件2000设于进料机构300上时,所述控制器用于控制所述第一顶起驱动组件311驱动所述进料机构300的第一顶杆313顶起所述工件2000,及控制所述夹取驱动组件903驱动所述夹具901夹取所述工件2000,及控制所述传送驱动组件驱动所述夹具901将所述工件2000移动至所述加工机构700,及控制所述第二顶起驱动组件319驱动所述加工机构700上的第二顶杆321顶起及控制所述夹取驱动组件903驱动所述夹具901释放所述工件2000,控制所述第二顶起驱动组件319驱动所述加工机构700上的第二顶杆321回缩,以将所述工件2000设于所述加工机构700上。
180.在工件2000加工完成后,所述控制器还用于控制所述第二顶起驱动组件319驱动所述加工机构700上的第二顶杆321顶起及控制所述夹取驱动组件903驱动所述夹具901夹取所述工件2000,及控制所述传送驱动组件驱动所述夹具901将所述工件2000移动至所述进料机构300,及控制所述第一顶起驱动组件311驱动所述进料机构300的第一顶杆313顶
起,及控制所述夹取驱动组件903驱动所述夹具901释放所述工件2000,控制所述第一顶起驱动组件311驱动所述加工机构700上的第一顶杆313回缩,以将所述工件2000设于所述进料机构300。
181.以下结合附图对于加工传送机构900的夹具901结构进行举例说明。
182.请参阅图27,所述夹具901包括夹板909及气缸组件911。
183.夹板909包括相背设置的第一面和第二面。为了便于描述,定义夹板909的长度方向为y轴方向,夹板909的宽度方向为x轴方向,夹板909的厚度方向为z轴方向。箭头方向为正向。当加工传送机构900所在的装置设于地面时,本实施例中,第一面为背向地面的面,及第二面为朝向地面的面。当然,在其他实施例中,第一面为朝向地面的面,及第二面为背向地面的面。
184.请参阅图28及图29,气缸组件911包括夹片模块913、缸体915及转动模块917。所述缸体915设于所述夹板909的第一面。缸体915的轴向为z轴方向。
185.所述夹片模块913的一端设于所述缸体915内。所述夹片模块913的另一端贯穿所述夹板909并与所述第一面相对设置。所述夹片模块913能够相对于所述缸体915升降,用于与所述夹板909相配合以夹持工件2000或释放工件2000。所述转动模块917的一端设于所述缸体915内并与所述夹片模块913在转动方向上相卡合。所述转动模块917的另一端位于所述缸体915外。需要说明的是,本技术所述的轴向为沿z轴方向,转动方向为绕z轴的方向。
186.请参阅图30,夹取驱动组件903包括转动驱动组件919。所述转动驱动组件919连接所述转动模块917的另一端,用于驱动所述转动模块917转动,以带动所述夹片模块913转动至正对待夹持区或从正对待夹持区处移开。所述夹持区为放置所述工件2000的区域。
187.本技术提供的加工传送机构900,通过设置能够沿轴向升降及能够绕轴向转动的气缸组件911,该气缸组件911配合夹板909形成夹具901,实现夹具901的转向、夹持工件2000或释放工件2000等功能,能够实现自动化程度高地夹取工件2000,提高工件2000加工效率。
188.可选的,所述夹取驱动组件903还包括升降驱动组件(未图示)。所述升降驱动组件连接所述缸体915。所述升降驱动组件用于改变所述缸体915内的气压差,以驱动所述夹片模块913沿所述缸体915的轴向升降。
189.可选的,所述控制器电连接所述升降驱动组件和所述转动驱动组件919。所述控制器用于控制所述转动驱动组件919驱动所述夹片模块913的另一端转动至正对所述夹持区并控制所述升降驱动组件驱动所述夹片模块913的另一端靠近所述夹板909以夹持所述工件2000。所述控制器还用于控制所述升降驱动组件驱动所述夹片模块913的另一端远离所述夹板909以释放所述工件2000,及控制所述转动驱动组件919驱动所述夹片模块913的另一端移出正对所述夹持区的位置。
190.以下结合附图对于气缸组件911的结构进行举例说明。
191.在一般技术中,气缸组件911能够实现沿缸体915轴向的伸缩运动,而这一伸缩运动能够带动工件2000沿直线的往返运动。而对于一些自动化设备中,需要驱动工件2000先升降再旋转、或边升降边旋转,当传统的气缸组件911遇到此情形时,还需要在气缸组件911外另外设置能够带动工件2000旋转的转动装置,如此,导致整个自动化装置结构复杂及性能稳定性也存在风险。本技术通过对气缸组件911进行创新性的改进,能够有效地应用于驱
动工件2000先升降再旋转、或边升降边旋转、或先旋转再升降等场景中。
192.可选的,气缸组件911为加工传送机构900的驱动气缸,气缸组件911用于驱动的工件2000包括但不限于工件2000等工件2000。
193.请参阅图31及图32,所述缸体915具有沿轴向依次连通的第四通孔923、缸体内腔924及第五通孔925。
194.所述夹片模块913的第一端设于所述缸体内腔924中,所述夹片模块913的第二端经所述第四通孔923伸至所述缸体915外。所述夹片模块913的第二端连接工件2000。可选的,气缸组件911用于加工传送机构900的夹具901的驱动组件,气缸组件911用于实现夹具901的夹持动作和释放动作。
195.可选的,夹片模块913在外力作用下能够沿缸体内腔924的内壁滑动,以带动工件2000沿轴向升降。
196.所述转动模块917的第一端设于所述缸体内腔924中,并与所述夹片模块913的第一端在转动方向上相卡合,所述转动模块917的第二端经所述第五通孔925伸至所述缸体915外。
197.可选的,转动模块917在所述转动驱动组件919的作用下能够绕轴向转动。
198.可选的,转动方向为绕轴向的圆周方向,即绕轴向的旋转方向。本技术所述的转动模块917的第一端与夹片模块913的第一端在转动方向上相卡合,是指转动模块917在绕轴向转动时会受到夹片模块913的阻力,当转动模块917的转动扭矩大于夹片模块913的阻力时,转动模块917能够带动夹片模块913同步绕轴向转动。
199.本技术实施例提供的气缸组件911,通过在缸体915内沿轴向设置夹片模块913及转动模块917,并设置转动模块917与夹片模块913在转动方向上相卡合,不仅使夹片模块913在外力作用下能够相对于缸体915升降,以实现气缸组件911在轴向方向的升降驱动,还使转动模块917在外力下相对于缸体915转动,由于转动模块917与夹片模块913相卡合,故转动模块917在转动的同时还能够带动夹片模块913随着转动模块917一起转动,进而实现气缸组件911绕轴向方向的旋转驱动功能,综上,本技术提供了的气缸组件911对结构进行改进,实现在结构相对简单、占据空间小的同时还能够实现气缸组件911沿轴向的伸缩运动及绕轴向的转动,实现气缸组件911具有更多的运动形式,增加气缸组件911的功能。
200.可以理解的,缸体内腔924为夹片模块913的第一端和转动模块917的第一端提供收容空间,故缸体内腔924的内部空间较大,第四通孔923和第五通孔925分别为夹片模块913和转动模块917提供的伸出缸体915外的通孔。本实施例中,第四通孔923的内径大小小于缸体内腔924的内径大小,第五通孔925的内径大小等于或大于所述缸体内腔924的内径大小,以便于经第五通孔925将夹片模块913安装于缸体内腔924内。当然,在其他实施方式中,第四通孔923的内径大小可大于或等于缸体内腔924的内径大小。第五通孔925的内径大小可小于所述缸体内腔924的内径大小。
201.可选的,缸体915的材质包括但不限于铝合金、碳钢、不锈钢等。
202.请参阅图31及图32,所述夹片模块913包括缸杆927及升降夹片929。所述缸杆927的一端设于所述缸体内腔924中。所述缸杆927的另一端经所述第四通孔923伸出所述缸体915,并连接设于所述缸体915外的升降夹片929。升降夹片929的延伸方向与缸杆927的延伸方向垂直或相交。所述升降夹片929用于随着所述缸杆927的旋转而旋转,并在所述缸杆927
的轴向运动时与夹板909相配合以夹紧或释放工件2000。所述升降夹片929与所述夹板909的第一面相对。夹板909设于升降夹片929与缸体915之间。若工件2000设于升降夹片929与夹板909之间。当升降夹片929随着缸杆927靠近转动杆时,升降夹片929与夹板909之间的距离减小,以夹持工件2000。当升降夹片929随着缸杆927远离转动杆时,升降夹片929与夹板909之间的距离增加,以释放工件2000。
203.需要说明的是,本技术所述的“连接”可以是指工件2000与工件2000之间的直接接触连接,也可以是指工件2000通过中间工件2000的间接连接。
204.可选的,缸杆927的材质包括但不限于普通碳钢、表面经镀硬铬的碳钢、不锈钢等,以使缸杆927具有较好的刚度、耐腐蚀性和耐磨性。
205.进一步地,请参阅图31及图32,所述气缸组件911还包括第一密封件931。所述第一密封件931密封于所述第四通孔923的内壁与所述缸杆927的外周面之间。
206.可选的,所述第一密封件931为密封圈,也可称为密封堵头。第一密封件931的材质包括但不限于硅胶,橡胶,丁腈橡胶,氯丁橡胶,乙丙橡胶等。
207.由于缸杆927能够相对第一密封件931沿轴向运动或旋转,所以第一密封件931对于缸体915与缸杆927之间为动密封。其中,第一密封件931与缸体915之间的连接方式包括但不限于一体成型、铆接、螺纹联接等。
208.可选的,缸杆927的材质包括但不限于为铝合金、碳钢、不锈钢等。
209.请参阅图31及图32,所述转动模块917包括转动杆933及转动片935。所述转动杆933的一端设于所述缸体内腔924中。所述转动杆933的另一端经所述第五通孔925伸出所述缸体915并连接设于所述缸体915外所述转动片935。所述转动片935的延伸方向与所述转动杆933的轴向相交或垂直。所述转动片935连接所述转动驱动组件919。所述转动片935用于在转动组件的作用下摆动,以带动所述转动杆933旋转。可选的,转动片935可在电机、气缸等作用下绕旋转,转动片935在转动的过程中带动转动杆933转动。所述转动杆933的一端与所述缸杆927的一端在转动方向上相卡合。转动杆933在转动片935的带动下转动,以带动缸杆927转动。
210.本技术对于转动杆933可转动的角度不做具体的限定。
211.可选的,转动杆933的材质包括但不限于普通碳钢、表面经镀硬铬的碳钢、不锈钢等,以使转动杆933具有较好的刚度、耐腐蚀性和耐磨性。
212.请参阅图31及图32,所述气缸组件911还包括第二密封件937。可选的,所述第二密封件937密封于所述第五通孔925的内壁与所述转动杆933的外周面之间。
213.可选的,所述第二密封件937为密封圈,也可称为密封堵头。第二密封件937的材质包括但不限于硅胶,橡胶,丁腈橡胶,氯丁橡胶,乙丙橡胶等。
214.由于转动杆933能够相对第二密封件937转动,所以第二密封件937对于缸体915与缸杆927之间为动密封。其中,第二密封件937与缸体915之间的连接方式包括但不限于一体成型、铆接、螺纹联接等。可选的,转动杆933与第二密封件937接触的外周面为圆柱面,以使转动杆933能够相对于第二密封件937转动。
215.再可选的,第二密封件937包括密封轴承及套设于所述密封轴承外围的密封圈,其中,密封轴承与转动杆933一体成型或密封围接于转动杆933的外围,转动杆933能够相对于密封轴承旋转。其中,密封轴承和密封圈实现对第五通孔925与转动杆933之间的密封连接。
216.所述转动杆933的一端与所述缸杆927的一端在转动方向上相卡合。具体的,转动杆933的一端与缸杆927的一端可在转动方向上直接卡合连接或通过中间连接件卡合连接。当所述转动杆933在外力作用下旋转时,所述转动杆933带动所述缸杆927旋转,缸杆927带动待驱动组件旋转。
217.所述转动杆933的一端与缸杆927的一端在轴向方向能够相对运动,换言之,缸杆927在相对于缸体915沿轴向升降时,转动杆933可相对缸体915在轴向方向上固定。
218.本技术所述的缸杆927沿缸体915的轴向方向上驱动方式包括但不限于以下的驱动方式。
219.可选的,请参阅图31及图32,所述夹片模块913还包括第二活塞939。所述第二活塞939设于所述缸体内腔924。所述第二活塞939的一端套设于所述缸杆927外围或嵌设于所述缸杆927内。所述第二活塞939与缸杆927固连为一体。所述第二活塞939的另一端的外周面滑动连接所述缸体内腔924的内壁。第二活塞939的外周面密封贴合于缸体内腔924的内壁。当第二活塞939在外力作用下沿缸体内腔924的内壁滑动时,所述第二活塞939带动所述缸杆927沿所述缸体内腔924的轴向移动,缸杆927在缸体915内做升降运动,并带动工件2000做升降运动。
220.可选的,当所述第二活塞939的一端嵌设于所述缸杆927内时,第二活塞939可套设于所述转动杆933的外围。换言之,转动杆933、第二活塞939及缸杆927依次嵌套设置。其中,第二活塞939与缸杆927过盈配合,以使第二活塞939与缸杆927之间在轴向上一起运动。第二活塞939与转动杆933在轴向上滑动连接。第二活塞939在转动方向上可与转动杆933一起转动。
221.可以理解的,在轴向方向上,缸杆927的中心轴线与转动杆933的中心轴线共线。缸体内腔924沿轴向方向具有相对设置的顶壁和底壁。第二活塞939能够在外力作用下在顶壁与底壁之间来回运动,进而实现第二活塞939带动缸体915相对于转动杆933沿轴向运动。
222.本技术实现第二活塞939在缸体内腔924内来回运动包括但不限于以下的实施方式。
223.可选的,所述缸体915的周侧壁还设有第六通孔926和第七通孔928。所述第六通孔926和所述第七通孔928皆贯穿所述缸体915的周侧壁,且连通所述缸体内腔924。所述第六通孔926和所述第七通孔928在所述缸体内腔924的轴向方向上分别位于所述第二活塞939的相对两侧。
224.进一步地,所述气缸组件911还包括气压调节模块(未图示)。所述气压调节模块包括第一气管及第二气管。其中,第一气管连通第六通孔926,第二气管连通第七通孔928。所述气压调节模块用于对所述第六通孔926或所述第七通孔928供气,以使所述第二活塞939沿所述缸体内腔924的轴向移动。
225.第六通孔926靠近于缸体内腔924的顶壁,第七通孔928靠近于缸体内腔924的底壁。第二活塞939与顶壁之间形成第一腔室,第二活塞939与底壁之间形成第二腔室。当气压调节模块对第六通孔926供气时,第一腔室的气压大于第二腔室的气压,以使第二活塞939朝向底壁运动,第二活塞939带动缸杆927远离转动杆933,但缸杆927不会脱离转动杆933。当气压调节模块对第七通孔928供气时,第二腔室的气压大于第一腔室的气压,以使第二活塞939朝向顶壁运动,第二活塞939带动缸杆927靠近转动杆933。如此,实现缸杆927带动工
件2000升降。
226.当然,在其他实施方式中,气压调节模块对第七通孔928抽气,以实现第二活塞939朝向底壁运动,第二活塞939带动缸杆927远离转动杆933。气压调节模块对第六通孔926抽气,以第二活塞939朝向顶壁运动,第二活塞939带动缸杆927靠近转动杆933。
227.本技术对于所述转动杆933与所述缸杆927相卡合的结构不做具体的限定,包括但不限于以下的实施方式。
228.在第一种可能的实施方式中,请参阅图31及图32,所述转动杆933通过第二活塞939与所述缸杆927相卡合。所述第二活塞939套设于所述转动杆933的外围。所述第二活塞939与所述转动杆933在轴向方向上相对运动。所述第二活塞939与所述转动杆933在所述转动方向上相卡合。转动杆933转动带动第二活塞939转动。所述第二活塞939与所述缸杆927过盈配合,所述第二活塞939在所述转动方向带动所述缸杆927运动。换言之,第二活塞939不仅仅在轴向上带动缸杆927升降,进而带动升降夹片929夹紧或释放工件;第二活塞939还在转动方向上电动缸杆927转动,进而带动升降夹片929转动。
229.可选的,请参阅图29,所述转动杆933的外周面设有至少一个棱角部941。所述第二活塞939设有至少一个凹角部943。所述凹角部943与所述棱角部941相配合,以使所述第二活塞939与所述转动杆933在所述转动方向上相卡合。
230.在第二种可能的实施方式中,请参阅图33及图34,第二活塞939的一部分套设于转动杆933的外围。第二活塞939的一部分套设于缸杆927的外围。转动杆933与缸杆927直接卡合连接。缸杆927能够沿轴向方向上远离或靠近转动杆933。缸杆927与转动杆933在转动方向上同步运动。
231.具体的,请参阅图33及图34,所述转动杆933的外周面设有至少一个棱角部941。所述缸杆927设有至少一个凹角部943。所述凹角部943与所述棱角部941相配合,以使所述转动杆933与所述缸杆927在转动方向上相卡合。
232.可选的,请参阅图34,所述缸杆927包括相背设置的第一端面9271和第二端面9272,第一端面9271与第二端面9272沿轴向方向相背设置。第一端面9271位于缸体内腔924中,第二端面9272位于缸体915外。缸杆927的外周面连接于第一端面9271与第二端面9272之间。至少一个凹角部943靠近第一端面9271。
233.请参阅图34,转动杆933具有相背设置的第三端面9331及第四端面9332,第三端面9331及第四端面9332沿轴向方向相背设置,第三端面9331位于缸体内腔924中,第四端面9332位于缸体915外。至少一个棱角部941设于第三端面9331。
234.请参阅图35及图36,第一端面9271设有第一凹槽9273,转动杆933的第三端面9331所在端部设于第一凹槽9273内。第一凹槽9273的内壁包括非圆柱状的凹角部943,该凹角部943的形状与棱角部941的形状为互补形状。由于凹角部943与棱角部941的存在,转动杆933无法相对于缸杆927绕轴向转动,故转动杆933带动缸杆927一起转动。可选的,转动杆933的第三端面9331与第一凹槽9273的底面可相贴合或间隔设置,本技术对此不做限定。本实施例中,缸杆927沿轴向方向上能够相对于转动杆933运动。在其他实施方式中,缸杆927沿轴向方向上与转动杆933一起运动。
235.本技术对于棱角部941的数量和形状不做具体的限制。可选的,棱角部941的数量为至少两个。本技术对于棱角部941的形状不做限定,棱角部941可以为锐角棱角部、直角棱
角部、钝角棱角部及弧形角棱角部。
236.在第三种可能的实施方式中,请参阅图35及图36,所述缸杆927的外周面设有至少一个棱角部941,及所述转动杆933设有至少一个凹角部943。所述凹角部943与所述棱角部941相配合,以使所述转动杆933与所述缸杆927在转动方向上相卡合。本实施方式可参考上一实施方式中转动杆933的结构与缸杆927的结构,与上一实施方式不同的是,本实施方式中,请参阅图37,缸杆927的第一端面9271设有第二凹槽9333,转动杆933的第三端面9331所在的端部设于第二凹槽9333内。
237.在再一实施方式中,棱角部941凸设于缸杆927的第一端面9271,转动杆933的第三端面9331设有第一凹槽,其中,第一凹槽用于收容棱角部941。
238.在其他实施方式中,棱角部941凸设于转动杆933的第三端面9331,缸杆927的第一端面9271设有第一凹槽,其中,第一凹槽用于收容棱角部941。
239.结合上述的任意一种实施方式,本技术对于棱角部941的结构包括但不限于以下的实施方式。
240.可选的,请参阅图29,所述棱角部941包括至少一个第一贴合平面945。所述凹角部943包括至少一个第二贴合平面947。所述第一贴合平面945与第二贴合平面947相贴合。其中,所述第一贴合平面945与所述缸杆927的轴向方向平行;或者,所述第一贴合平面945与所述缸杆927的轴向相交的角度小于90
°
。
241.以棱角部941设于转动杆933的第三端面9331所在的端部为例。举例而言,棱角部941为一个平面与一个圆弧面相连接形成,该平面与所述缸杆927的轴向方向平行。此时,转动杆933的第三端面9331所在的端的外周面至少包括一个平面与一个圆弧面。第三端面9331的轮廓线包括直线与圆弧线。
242.棱角部941为两个平面相连接形成,此时,转动杆933的第三端面9331所在的端的外周面至少包括两个平面。这两个平面相背设置或相交设置。这两个平面与所述缸杆927的轴向方向平行。转动杆933的第三端面9331所在的端部的外周面呈三角形柱面、四边形柱面、五边形柱面、六边形柱面等等。第三端面9331的轮廓线包括三角形、四边形、五边形、六边形等。
243.棱角部941为两个平面相连接形成,此时,转动杆933的第三端面9331所在的端的外周面至少包括两个平面。这两个平面与所述缸杆927的轴向方向相交。
244.所述棱角部941由至少两个弧形面相连接形成。转动杆933的第三端面9331所在的端部的外周面呈椭圆柱面等。第三端面9331的轮廓线包括椭圆等。
245.本技术中,夹板909的形状呈矩形。多个气缸组件911在夹板909上沿y轴方向排列,且皆靠近于夹板909的边沿。当升降夹片929处于未工作状态时,升降夹片929沿y轴方向延伸。当升降夹片929处于工作状态时,升降夹片929绕z轴方向且远离夹板909的边沿的方向转动90
°
。
246.本技术提供的气缸组件911的应用场景包括但不限于以下场景:气缸组件911用于夹持工件2000,其中,工件2000的来料方向为第一方向,升降夹片929的延伸方向为第二方向,其中,第二方向与第一方向垂直,可选的,升降夹片929处于放松状态,缸杆927远离转动杆933。通过外力控制转动片935带动转动杆933转动,以带动缸杆927转动及升降夹片929转动至第一方向,且升降夹片929朝向工件2000所在侧。当工件2000的一部分设于升降夹片
929与夹板909之间时,将气压调节模块通过对第七通孔928供气,使得第二腔室的气压大于第一腔室的气压,活塞939带动缸杆927朝向转动杆933运动,以使升降夹片929靠近夹板909,进而夹紧工件2000;通过外力驱动气缸组件911及夹片带动工件2000移动到加工位106,将气压调节模块通过对第四通孔923供气,使得第一腔室的气压大于第二腔室的气压,活塞939带动缸杆927远离转动杆933,以使升降夹片929远离夹板909,进而放松工件2000;再通过外力控制转动片935带动转动杆933转动,以带动缸杆927转动及升降夹片929转动至第二方向,从而释放工件2000。
247.可以理解的,以上仅仅为一种应用场景的举例,在夹紧的工件2000的过程中还可以先旋转至第一方向,再使升降夹片929处于放松状态,或者,使升降夹片929边旋转边处于放松状态,等工件2000位于升降夹片929与夹板909之间后,在夹紧工件2000。
248.以下结合附图对于转动驱动组件919的结构进行举例说明。
249.可选的,请参阅图31,所述转动驱动组件919还包括连接片949、推杆951及推杆气缸953。所述连接片949的一端转动连接所述转动片935远离所述转动杆933的一端,所述连接片949的另一端固定连接所述推杆951。所述推杆951连接所述推杆气缸953。所述推杆气缸953用于推动所述推杆951及所述连接片949沿所述推杆951的延伸方向(y轴方向)。所述连接片949带动所述转动片935转动,以带动所述转动杆933、所述缸杆927及所述升降夹片929转动。
250.可选的,请参阅图31,所述连接片949设有条形孔955。所述条形孔955的延伸方向与所述推杆951的延伸方向相交或垂直。具体的,条形孔955的延伸方向为x轴方向。所述转动片935远离所述转动杆933的一端滑动连接所述条形孔955的内壁。
251.具体的,当推杆气缸953推动推杆951、连接片949沿y轴正向移动一段进程时,所述转动片935在连接片949的带动下绕z轴方向转动大概90
°
,转动片935经过转动杆933、缸杆927的传递,以带动升降夹片929绕z轴方向转动大概90
°
,进而将升降夹片929从未工作状态转动至工作状态。
252.在转动片935转动的过程中,转动片935远离转动杆933的一端沿条形孔955滑动,以吸收转动片935在转动过程中沿x轴方向增加的长度,防止转动片935在转动过程中卡死。
253.可选的,请参阅图31,所述推杆气缸953、所述推杆951、所述连接片949及所述气缸组件911的数量皆为多个。多个所述推杆气缸953包括第一推杆气缸957及第二推杆气缸959。多个所述推杆951包括第一推杆961和第二推杆963。所述第一推杆气缸957连接所述第一推杆961。所述第二推杆气缸959连接所述第二推杆963。第一推杆961和第二推杆963皆沿y轴方向排列并排设置。第一推杆气缸957通过第一套片965连接第一推杆961,第一推杆气缸957与第一推杆961并排设置。第一推杆气缸957在气体推动下推动第一套片965沿y轴方向往复运动,进而带动第一推杆961沿y轴方向往复运动。相类似地,第二推杆气缸959通过第二套片967连接第二推杆963,第二推杆气缸959与第二推杆963并排设置。第二推杆气缸959在气体推动下推动第二套片967沿y轴方向往复运动,进而带动第二推杆963沿y轴方向往复运动。
254.请参阅图38,第一推杆961和第二推杆963皆带动多个气缸组件911运动。本技术以两个气缸组件911为一组夹持工件2000为例,当然,在其他实施例中,可以是三个、四个等气缸组件911为一组。第一推杆961和第二推杆963带动两组气缸组件911运动,当然,在其他实
施方式中,第一推杆961和第二推杆963带动一组、三组等气缸组件911一起运动。本实施例中,两组气缸组件911分别为沿y轴反方向依次排列的第一气缸组件969、第二气缸组件971、第三气缸组件973及第四气缸组件975。多个所述连接片949包括第一连接片977、第二连接片979、第三连接片981及第四连接片983。
255.可选的,所述第一气缸组件969经所述第一连接片977连接所述第一推杆961。所述第二气缸组件971经所述第二连接片979连接所述第二推杆963。所述第三气缸组件973经所述第三连接片981连接所述第一推杆961。所述第四气缸组件975经所述第四连接片983连接所述第二推杆963。
256.第一气缸组件969和第三气缸组件973在第一推杆961、第一推杆气缸957的作用下同步运动。第二气缸组件971和第四气缸组件975在第二推杆963、第二推杆气缸959的作用下同步运动。其中,第一推杆气缸957带着第一推杆961的运动方向与第二推杆气缸959带着第二推杆963的运动方向相反。第一气缸组件969的升降夹片929和第二气缸组件971的升降夹片929的放置方向相同。第一推杆961通过第一连接片977和第三连接片981分别带动第一气缸组件969的升降夹片929和第二气缸组件971的升降夹片929同步同向转动,例如,逆时针方向。第二推杆963通过第二连接片979和第四连接片983分别带动第二气缸组件971的升降夹片929和第四气缸组件975的升降夹片929同步同向转动,例如顺时针方向。在未工作状态,第一气缸组件969的升降夹片929的摆放方向与第二气缸组件971的升降夹片929的摆放方向相反,经过转动后,第一气缸组件969、第二气缸组件971、第三气缸组件973及第四气缸组件975的升降夹片929皆转动至x轴方向,并朝向工件2000来料的方向,以夹持工件2000。
257.当然,在其他实施方式中,第一气缸组件969的升降夹片929、第二气缸组件971的升降夹片929的放置方向相同,第一推杆961可通过第一连接片977、第二连接片979分别带动第一气缸组件969的升降夹片929、第二气缸组件971的升降夹片929同步转动至朝向工件2000来料的方向。
258.第三气缸组件973的升降夹片929、第四气缸组件975的升降夹片929的放置方向相同,且该方向与第一气缸组件969的升降夹片929的放置方向相反。第二推杆963可通过第三连接片981、第四连接片983分别带动第三气缸组件973的升降夹片929、第四气缸组件975的升降夹片929同步转动至朝向工件2000来料的方向。
259.可以理解的,请参阅图39,传送机构900包括多个夹板909及连接在相邻的两个夹板909之间的连接板910。其中,一个夹板909能够设置4个气缸组件911。本实施方式中,传送机构900能够设置三个夹板909。在其他实施方式中,传送机构900能够设置2个、4个夹板909等等。
260.以上所述是本技术的部分实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1