一种智能AGV升降机器人制孔装置的制作方法
一种智能agv升降机器人制孔装置
技术领域
1.本实用新型属于agv升降机器人技术领域,尤其涉及一种智能agv升降机器人制孔装置。
背景技术:
2.agv即:automated guided vehicle简称agv,当前最常见的应用如:agv搬运机器人或agv小车,主要功用集中在自动物流搬转运,agv搬运机器人是通过特殊地标导航自动将物品运输至指定地点,最常见的引导方式为磁条引导,激光引导;目前最先进扩展性最强是由米克力美科技开发的超高频rfid引导。
3.磁条引导的方式是常用也是成本最低的方式,但是站点设置有一定的局限性以及对场地装修风格有一定影响;激光引导成本最高对场地要求也比较高所以一般不采用;rfid引导成本适中,其优点是引导精度高,站点设置更方便可满足最复杂的站点布局,对场所整体装修环境无影响,其次rfid高安全性稳定性也是磁条导航和激光导航方式不具备的,但是现有的agv升降机器人制孔设备依然存在着移动路径容易发生片偏移,下方钻头不容易更换的问题。
4.因此,发明一种智能agv升降机器人制孔装置显得非常必要。
技术实现要素:
5.为了解决上述技术问题,本实用新型提供一种智能agv升降机器人制孔装置,以解决现有的agv升降机器人制孔设备依然存在着移动路径容易发生片偏移,下方钻头不容易更换的问题。一种智能agv升降机器人制孔装置,包括支撑底座,支撑台,支撑框架,螺纹爬升杆,agv小车,转动电机和开孔转头,其中:支撑台通过螺栓安装在支撑底座的表面,且支撑框架通过螺栓安装在支撑台的上方,该螺纹爬升杆通过螺栓安装在支撑框架的内部;所述agv小车嵌套在螺纹爬升杆的表面,且转动电机通过螺栓安装在agv小车的内部,该开孔转头通过螺栓安装在转动电机的下方。
6.支撑框架包括主体支撑板,螺纹杆固定板和固定螺栓,且螺纹杆固定板焊接在主体支撑板的两端,该固定螺栓镶嵌在主体支撑板的内部,并镶嵌在墙壁之上。
7.agv小车包括支撑外壳,爬升电机和电机固定板,且爬升电机通过螺栓安装在支撑外壳的内部,该电机固定板镶嵌在支撑外壳的内部,并通过螺栓进行固定。
8.支撑框架采用一侧c字形钢制金属壳,且支撑框架内部的螺纹杆固定板之间相互平行,该支撑框架内部的螺纹杆固定板与螺纹爬升杆之间相互垂直,有利于支撑其内部的螺纹爬升杆,规定agv小车的移动路径,防止agv小车在移动过程中出现偏差,且可以通过固定螺栓安装在墙壁之上,防止本实用新型出现歪倒的情况发生。
9.agv小车内部的爬升电机采用贯通式直线丝杆步进电机,且agv小车内部的爬升电机采用4组,其之间同时工作,该agv小车整体可通过其内部的爬升电机进行垂直方向上的移动,有利于通过agv小车的移动来带动转动电机的爬升和下落,依此来实现开孔转头上下
移动的卡孔工作。
10.开孔转头采用钢制金属钻头,且开孔转头的后端设置有可安装在转动电机转动轴上的安装套管,该开孔转头可通过安装套管进行快速的安装和拆卸,有利于根据打孔的大小不同,可快速的进行更换和安装。
11.与现有技术相比,本实用新型具有如下有益效果:
12.1.本实用新型支撑框架的设置,有利于支撑其内部的螺纹爬升杆,规定agv小车的移动路径,防止agv小车在移动过程中出现偏差,且可以通过固定螺栓安装在墙壁之上,防止本实用新型出现歪倒的情况发生。
13.2.本实用新型agv小车的设置,有利于通过agv小车的移动来带动转动电机的爬升和下落,依此来实现开孔转头上下移动的卡孔工作。
14.3.本实用新型开孔转头的设置,有利于根据打孔的大小不同,可快速的进行更换和安装。
附图说明
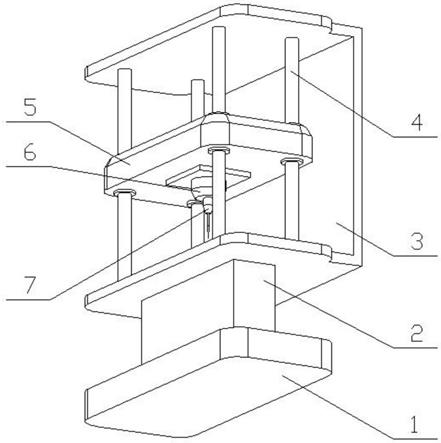
15.图1是本实用新型的结构示意图。
16.图2是本实用新型支撑框架的结构示意图。
17.图3是本实用新型agv小车的结构示意图。
18.图中:
[0019]1‑
支撑底座,2
‑
支撑台,3
‑
支撑框架,31
‑
主体支撑板,32
‑
螺纹杆固定板,33
‑
固定螺栓,4
‑
螺纹爬升杆,5
‑
agv小车,51
‑
支撑外壳,52
‑
爬升电机,53
‑
电机固定板,6
‑
转动电机,7
‑
开孔转头。
具体实施方式
[0020]
为了使本技术领域的人员更好地理解本实用新型方案,下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分的实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
[0021]
如附图1至附图3所示。
[0022]
本实用新型提供的一种智能agv升降机器人制孔装置,包括支撑底座1,支撑台2,支撑框架3,螺纹爬升杆4,agv小车5,转动电机6和开孔转头7,其中:支撑台2通过螺栓安装在支撑底座1的表面,且支撑框架3通过螺栓安装在支撑台2的上方,该螺纹爬升杆4通过螺栓安装在支撑框架3的内部;所述agv小车5嵌套在螺纹爬升杆4的表面,且转动电机6通过螺栓安装在agv小车5的内部,该开孔转头7通过螺栓安装在转动电机6的下方。
[0023]
支撑框架3包括主体支撑板31,螺纹杆固定板32和固定螺栓33,且螺纹杆固定板32焊接在主体支撑板31的两端,该固定螺栓33镶嵌在主体支撑板31的内部,并镶嵌在墙壁之上。
[0024]
agv小车5包括支撑外壳51,爬升电机52和电机固定板53,且爬升电机52通过螺栓安装在支撑外壳51的内部,该电机固定板53镶嵌在支撑外壳51的内部,并通过螺栓进行固定。
[0025]
本实用新型提供的一种智能agv升降机器人制孔装置,支撑底座1和支撑台2用于将支撑框架3向上顶起;支撑框架3采用一侧c字形钢制金属壳,且支撑框架3内部的螺纹杆固定板32之间相互平行,该支撑框架3内部的螺纹杆固定板32与螺纹爬升杆4之间相互垂直,有利于支撑其内部的螺纹爬升杆4,规定agv小车5的移动路径,防止agv小车5在移动过程中出现偏差,且可以通过固定螺栓33安装在墙壁之上,防止本实用新型出现歪倒的情况发生;螺纹爬升杆4用于供agv小车5移动;agv小车5内部的爬升电机52采用贯通式直线丝杆步进电机,且agv小车5内部的爬升电机52采用4组,其之间同时工作,该agv小车5整体可通过其内部的爬升电机52进行垂直方向上的移动,有利于通过agv小车5的移动来带动转动电机6的爬升和下落,依此来实现开孔转头7上下移动的卡孔工作;转动电机6用于带动开孔转头7移动;开孔转头7采用钢制金属钻头,且开孔转头7的后端设置有可安装在转动电机6转动轴上的安装套管,该开孔转头7可通过安装套管进行快速的安装和拆卸,有利于根据打孔的大小不同,可快速的进行更换和安装。
[0026]
利用本实用新型所述技术方案,或本领域的技术人员在本实用新型技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1