一种机械工程的快速夹持装置的制作方法
1.本实用新型涉及机械加工设备相关领域,具体是一种机械工程的快速夹持装置。
背景技术:
2.机械工程是以有关的自然科学和技术科学为理论基础,结合生产实践中的技术经验,研究和解决在开发、设计、制造、安装、运用和维修各种机械中的全部理论和实际问题的应用学科;夹持装置指的是在机械加工中将工件进行夹持固定的机械装置。
3.通常的专用夹具适用性低,结构单一,但是其夹紧不够紧密,容易造成机械加工时发生误差,影响整体作用;现有装置在装夹时步骤较为繁杂,且现有夹具缺少测量夹紧力度的设备,容易使夹紧部件的夹紧力过大,导致一些硬度较低的工件表面容易受损,同时现有装置难以适用于多种不规则工件的夹紧工作。
技术实现要素:
4.因此,为了解决上述不足,本实用新型在此提供一种机械工程的快速夹持装置。
5.本实用新型是这样实现的,构造一种机械工程的快速夹持装置,该装置包括底板、移动轮、液压调节杆、工作台、导轨、电动滑块、加工组件、夹紧机构、辅助机构、控制面板和电线,所述底板底部四周均与移动轮螺栓连接,所述底板顶部四周均与液压调节杆螺栓连接,所述液压调节杆顶部与工作台底部四周螺栓连接,所述工作台顶部左侧与导轨螺栓连接,所述导轨内轨与电动滑块滑动连接,所述电动滑块顶部与加工组件螺栓连接,所述工作台顶部右侧与控制面板螺栓连接,所述控制面板右端与电线固定连接,所述液压调节杆、电动滑块和电线均与控制面板电连接,所述夹紧机构设于工作台内槽底部,所述夹紧机构包括限位杆、放置板、电磁弹簧、摩擦层、转轴、夹紧臂、电动推杆、微型气缸、夹紧板、压力传感器和plc控制器,所述工作台内槽底部与限位杆底部螺栓连接,所述限位杆顶部与放置板底部中侧螺栓连接,所述放置板底部中侧与电磁弹簧弹性连接,所述电磁弹簧底部与工作台内槽底部弹性连接,所述电磁弹簧与限位杆底部固定杆外侧滑动连接,所述放置板顶部与摩擦层固定连接,所述放置板外侧开口壁与转轴转动连接,所述转轴与夹紧臂中侧通孔固定连接,所述夹紧臂底部通孔与电动推杆顶部固定杆转动连接,所述电动推杆底部移动杆与工作台内槽底部转动连接,所述夹紧臂顶部与微型气缸底部螺栓连接,所述微型气缸活塞杆与夹紧板螺栓连接,所述微型气缸顶部与压力传感器螺栓连接,所述压力传感器顶部感应头与夹紧板螺栓连接,所述底板顶部与plc控制器螺栓连接,所述电磁弹簧、电动推杆、微型气缸和压力传感器均与plc控制器电信号连接,所述电磁弹簧、电动推杆、微型气缸、压力传感器和plc控制器均与控制面板电连接,所述辅助机构设于工作台顶部。
6.优选的,所述辅助机构包括固定底座、固定板、夹紧气缸、夹紧块、滑块和滑槽,所述工作台顶部与固定底座螺栓连接,所述固定底座顶部与固定板螺栓连接,所述固定板右端与夹紧气缸螺栓连接,所述夹紧气缸活塞杆与夹紧块螺栓连接,所述夹紧块底部与滑块螺栓连接,所述滑块与滑槽内轨滑动连接,所述滑槽设于固定底座顶部中侧,所述夹紧气缸
与plc控制器电信号连接,所述夹紧气缸与控制面板电连接。
7.优选的,所述放置板外侧弧面共设有三组转轴和夹紧臂,且三组转轴呈环状等距分布。
8.优选的,所述放置板与工作台内槽侧壁之间的距离均为5cm,且放置板与工作台内槽底部呈平行关系。
9.优选的,所述夹紧臂与电动推杆之间的转动角度区间为100
°
到160
°
之间,且三组电动推杆呈电路串联连接。
10.优选的,所述夹紧板和夹紧块与工件的接触面均设有挤压橡胶层,且夹紧臂顶部的三组夹紧板与工作台顶部呈夹角为30
°
的向心倾斜角。
11.优选的,所述工作台顶部共设有三组辅助机构,且固定底座与夹紧臂之间的夹角均为60
°
。
12.优选的,所述夹紧气缸的延伸长度与放置板半径长度相同,且三组夹紧气缸呈电路串联连接。
13.优选的,所述摩擦层材质为橡胶。
14.优选的,所述夹紧臂材质为材料钢。
15.本实用新型具有如下优点:本实用新型通过改进在此提供一种机械工程的快速夹持装置,与同类型设备相比,具有如下改进:
16.本实用新型所述一种机械工程的快速夹持装置,通过设置了夹紧机构在工作台内槽底部,设置限位杆和电磁弹簧,有利于提高对放置板的限位和带动效果,设置放置板和摩擦层,有利于提高对工件的防滑放置效果,设置夹紧臂和电动推杆,有利于提高夹紧臂对待加工工件的夹紧效果,设置微型气缸和压力传感器,有利于提高对工件的夹紧效果和监测效果。
17.本实用新型所述一种机械工程的快速夹持装置,通过设置了辅助机构在工作台顶部,设置夹紧气缸和夹紧块,有利于提高对工件的辅助夹紧效果,设置滑块和滑槽,有利于提高夹紧块移动时的稳定效果。
附图说明
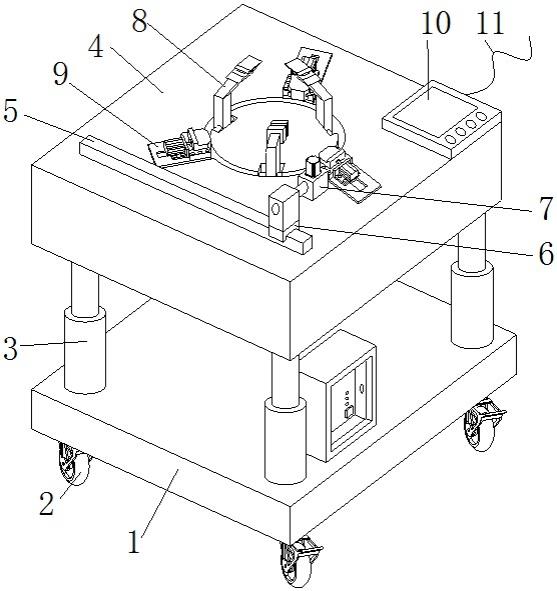
18.图1是本实用新型结构示意图;
19.图2是本实用新型的夹紧机构结构示意图;
20.图3是本实用新型的图2中a处的放大结构示意图;
21.图4是本实用新型的辅助机构结构示意图;
22.图5是本实用新型的辅助机构俯视结构示意图。
23.其中:底板
‑
1、移动轮
‑
2、液压调节杆
‑
3、工作台
‑
4、导轨
‑
5、电动滑块
‑
6、加工组件
‑
7、夹紧机构
‑
8、辅助机构
‑
9、控制面板
‑
10、电线
‑
11、限位杆
‑
81、放置板
‑
82、电磁弹簧
‑
83、摩擦层
‑
84、转轴
‑
85、夹紧臂
‑
86、电动推杆
‑
87、微型气缸
‑
88、夹紧板
‑
89、压力传感器
‑
810、plc控制器
‑
811、固定底座
‑
91、固定板
‑
92、夹紧气缸
‑
93、夹紧块
‑
94、滑块
‑
95、滑槽
‑
96。
具体实施方式
24.下面将结合附图1
‑
5对本实用新型进行详细说明,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.请参阅图1,本实用新型的一种机械工程的快速夹持装置,包括底板1、移动轮2、液压调节杆3、工作台4、导轨5、电动滑块6、加工组件7、夹紧机构8、辅助机构9、控制面板10和电线11,底板1底部四周均与移动轮2螺栓连接,底板1顶部四周均与液压调节杆3螺栓连接,液压调节杆3顶部与工作台4底部四周螺栓连接,工作台4顶部左侧与导轨5螺栓连接,导轨5内轨与电动滑块6滑动连接,电动滑块6顶部与加工组件7螺栓连接,工作台4顶部右侧与控制面板10螺栓连接,控制面板10右端与电线11固定连接,液压调节杆3、电动滑块6和电线11均与控制面板10电连接。
26.请参阅图2和图3,本实用新型的一种机械工程的快速夹持装置,夹紧机构8设于工作台4内槽底部,提高夹紧机构8的夹紧效果,夹紧机构8包括限位杆81、放置板82、电磁弹簧83、摩擦层84、转轴85、夹紧臂86、电动推杆87、微型气缸88、夹紧板89、压力传感器810和plc控制器811,工作台4内槽底部与限位杆81底部螺栓连接,提高限位杆81的固定效果,限位杆81顶部与放置板82底部中侧螺栓连接,提高限位杆81对放置板82的限位效果,放置板82底部中侧与电磁弹簧83弹性连接,提高电磁弹簧83的带动效果,电磁弹簧83底部与工作台4内槽底部弹性连接,提高电磁弹簧83的固定效果,电磁弹簧83与限位杆81底部固定杆外侧滑动连接,提高电磁弹簧83移动时的稳定性,放置板82顶部与摩擦层84固定连接,提高摩擦层84的固定效果,放置板82外侧开口壁与转轴85转动连接,提高转轴85转动时的稳定性,转轴85与夹紧臂86中侧通孔固定连接,提高对夹紧臂86的带动效果,夹紧臂86底部通孔与电动推杆87顶部固定杆转动连接,提高电动推杆87对夹紧臂86的带动效果,电动推杆87底部移动杆与工作台4内槽底部转动连接,提高电动推杆87的转动效果,夹紧臂86顶部与微型气缸88底部螺栓连接,提高微型气缸88的固定效果,微型气缸88活塞杆与夹紧板89螺栓连接,提高夹紧板89的固定效果,微型气缸88顶部与压力传感器810螺栓连接,提高压力传感器810的固定效果,压力传感器810顶部感应头与夹紧板89螺栓连接,提高压力传感器810的感应效果,底板1顶部与plc控制器811螺栓连接,提高plc控制器811的固定效果,电磁弹簧83、电动推杆87、微型气缸88和压力传感器810均与plc控制器811电信号连接,电磁弹簧83、电动推杆87、微型气缸88、压力传感器810和plc控制器811均与控制面板10电连接,辅助机构9设于工作台4顶部,提高辅助机构9的辅助夹紧效果,放置板82外侧弧面共设有三组转轴85和夹紧臂86,且三组转轴85呈环状等距分布,有利于提高夹紧臂86的夹紧效果,放置板82与工作台4内槽侧壁之间的距离均为5cm,且放置板82与工作台4内槽底部呈平行关系,有利于提高放置板82的带动效果,夹紧臂86与电动推杆87之间的转动角度区间为100
°
到160
°
之间,且三组电动推杆87呈电路串联连接,有利于提高电动推杆87对夹紧臂86的带动效果,夹紧板89和夹紧块94与工件的接触面均设有挤压橡胶层,且夹紧臂86顶部的三组夹紧板89与工作台4顶部呈夹角为30
°
的向心倾斜角,有利于提高夹紧板89和夹紧块94的夹紧效果。
27.请参阅图4和图5,本实用新型的一种机械工程的快速夹持装置,辅助机构9包括固定底座91、固定板92、夹紧气缸93、夹紧块94、滑块95和滑槽96,工作台4顶部与固定底座91
螺栓连接,提高固定底座91的固定效果,固定底座91顶部与固定板92螺栓连接,提高固定板92的固定效果,固定板92右端与夹紧气缸93螺栓连接,提高夹紧气缸93的固定效果,夹紧气缸93活塞杆与夹紧块94螺栓连接,提高夹紧块94的带动效果,夹紧块94底部与滑块95螺栓连接,提高滑块95的带动效果,滑块95与滑槽96内轨滑动连接,提高滑块95移动时的稳定性,滑槽96设于固定底座91顶部中侧,为滑块95移动提供限位位置,夹紧气缸93与plc控制器811电信号连接,夹紧气缸93与控制面板10电连接,工作台4顶部共设有三组辅助机构9,且固定底座91与夹紧臂86之间的夹角均为60
°
,有利于提高辅助机构9的辅助夹紧效果,夹紧气缸93的延伸长度与放置板82半径长度相同,且三组夹紧气缸93呈电路串联连接,提高夹紧气缸93的控制效果。
28.本实用新型通过改进提供一种机械工程的快速夹持装置,其工作原理如下;
29.第一,使用本设备时,首先将本设备放置在工作区域中,然后将装置与外部电源相连接,即可为本设备提供工作所需的电源;
30.第二,工作人员先通过外部计算机对plc控制器811进行编程工作,然后工作人员将待加工的工件放置在摩擦层84顶部,然后控制面板10控制plc控制器811执行夹紧步骤,plc控制器811控制电磁弹簧83进行通电收缩,电磁弹簧83收缩带动放置板82向下移动,当放置板82移动时带动限位杆81的移动杆向下移动,通过限位杆81对放置板82进行限位限速动作,避免放置板82受电磁弹簧83带动的移动速度过快,当放置板82移动时带动夹紧臂86同步向下移动,从而使夹紧臂86与电动推杆87之间互相推动而进行转动,此时夹紧臂86与电动推杆87之间的角度减小,放置板82外侧弧面的三组夹紧臂86向放置板82的圆心处进行倾斜,从而使夹紧臂86向待加工的工件表面方向移动,然后plc控制器811控制电动推杆87和微型气缸88同步进行工作,电动推杆87进行延伸动作推动夹紧臂86转动,从而使夹紧臂86与放置板82顶部之间的夹角减小,夹紧臂86带动微型气缸88和夹紧板89进一步与工件表面进行夹紧动作;
31.第三,微型气缸88工作时通过其活塞杆带动夹紧板89夹紧工件表面,通过压力传感器810监测夹紧板89与微型气缸88之间的压力情况,当压力传感器810检测到压力过高时,压力传感器810发射电信号给plc控制器811,plc控制器811控制微型气缸88减小气压夹紧动力,此时plc控制器811完成夹紧动作,有利于提高夹紧板89的夹紧效果,同时有利于提高夹紧效果和效率,然后工作人员通过控制面板10控制plc控制器811进行辅助夹紧工序,plc控制器811控制夹紧气缸93进行工作,夹紧气缸93通过推动夹紧块94和滑块95在滑槽96向放置板82圆心处移动,从而使夹紧气缸93带动夹紧块94夹紧工件表面,通过三组的夹紧块94与三组夹紧板89进行交错分布,有利于提高对工件的夹紧效果,同步提高夹紧部件的适用效果;
32.第四,当加工完成后,工作人员通过控制面板10控制plc控制器811执行放松工序,plc控制器811先通过夹紧气缸93进行收缩,夹紧气缸93收缩带动夹紧块94和滑块95向滑槽96方向移动,并使滑块95进入滑槽96内槽,待夹紧块94停止夹紧工件后,然后plc控制器811控制微型气缸88收缩带动夹紧板89远离工件,此时工作人员便可取出加工完成的工件,然后plc控制器811先后控制微型气缸88和电动推杆87进行复位工作,此时压力传感器810停止工作,微型气缸88带动夹紧板89复位,电动推杆87带动夹紧臂86转动复位至其顶部杆与放置板82呈垂直关系,然后plc控制器811停止对电磁弹簧83进行通电工作,电磁弹簧83带
动放置板82和限位杆81的移动杆进行复位,有利于提高对工件的快速夹紧和放松效果,同时有利于提高夹紧和放松的自动化控制程度。
33.本实用新型通过改进提供一种机械工程的快速夹持装置,设置限位杆81和电磁弹簧83,有利于提高对放置板82的限位和带动效果,设置放置板82和摩擦层84,有利于提高对工件的防滑放置效果,设置夹紧臂86和电动推杆87,有利于提高夹紧臂86对待加工工件的夹紧效果,设置微型气缸88和压力传感器810,有利于提高对工件的夹紧效果和监测效果,设置夹紧气缸93和夹紧块94,有利于提高对工件的辅助夹紧效果,设置滑块95和滑槽96,有利于提高夹紧块94移动时的稳定效果。
34.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,并且本实用新型使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中,常规的型号,加上电路连接采用现有技术中常规的连接方式,在此不再详述。
35.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1