一种用于工业自动化加工的焊接机器人的制作方法
1.本实用新型主要涉及焊接机器人的技术领域,具体为一种用于工业自动化加工的焊接机器人。
背景技术:
2.焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化组织工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域,目前来说,对于体积较大的工件,有些焊接的位置太过深入工件,但是轴向旋转的焊接机器人无法继续深入,所以对焊接工作带来了很大的不便。例如申请号为201822198326.6的专利,本实用新型公开了一种用于工业自动化加工的焊接机器人,包括安装箱、控制箱、安装盘、安装杆,所述安装箱前端设置有第一电机,所述安装箱内设置有第一减速器,所述安装箱上端设置有所述控制箱,所述控制箱内设置有集成芯片,所述集成芯片上端设置有处理器,所述集成芯片一侧设置有plc控制器,所述第一减速器一侧设置有第一转轴,所述第一转轴一侧设置有第一液压伸缩柱,所述第一液压伸缩柱一侧设置有所述安装盘。有益效果在于:结构合理,操作简单,使用方便,首先利用焊缝跟踪传感器对工件进行扫面,通过处理器计算焊接的运行路线,实现焊接的自动化,本装置可以使焊枪进行z轴、x轴移动,极大的提升了机器人焊接的可操作性。但是该机器人出现异常时,不便于更换检查。
技术实现要素:
3.本实用新型主要提供了一种用于工业自动化加工的焊接机器人,用以解决上述背景技术中提出的技术问题。
4.本实用新型解决上述技术问题采用的技术方案为:
5.一种用于工业自动化加工的焊接机器人,包括安装盘,所述安装盘左侧外壁固定连接有安装箱,所述安装箱左侧外壁固定连接有电动伸缩杆,所述电动伸缩杆左侧固定安装有连接筒,所述连接筒左侧设有连接盘,所述连接盘右侧外壁固定连接有螺纹筒,所述螺纹筒与连接筒螺纹连接,所述连接盘左侧外壁设有转槽,所述转槽内壁固定连接有连接轴,所述连接轴外壁活动连接有输出组件,本实用新型通过连接外接控制器实现自动化,通过电动伸缩杆便于对长度进行调节,通过设置的连接盘便于调节输出组件的方位,利用拼装结构,从而有效实现该机器人出现异常时,便于检修更换。
6.进一步的,所述电动伸缩杆左端外壁对称设有多个长槽,此设计便于对长块限位。
7.进一步的,所述长槽下端内壁设有限位孔,此设计便于对连接筒限位固定。
8.进一步的,所述连接筒内壁对称一体成型有多个长块,此设计与长槽契合。
9.进一步的,所述长块外壁均设有台阶孔,所述台阶孔内壁固定连接有弹簧,所述弹簧不与台阶孔内壁接触的一端固定连接有伸缩块,所述伸缩块与限位孔契合,此设计便于连接筒拆卸安装。
10.进一步的,所述输出组件包括连接套筒,所述连接筒活动连接在连接轴外壁,所述连接套筒外壁固定连接有连接杆,所述连接杆远离连接套筒的一端固定连接有连接板,此设计便于调节输出组件的方位。
11.进一步的,所述连接板上端设有凹槽,所述凹槽内壁活动连接有转球,所述转球外壁固定连接有焊接头,此设计便于调节焊接头的位置。
12.与现有技术相比,本实用新型的有益效果为:
13.本实用新型通过连接外接控制器实现自动化,通过电动伸缩杆便于对长度进行调节,通过设置的连接盘便于调节输出组件的方位,利用拼装结构,从而有效实现该机器人出现异常时,便于检修更换。
14.以下将结合附图与具体的实施例对本实用新型进行详细的解释说明。
附图说明
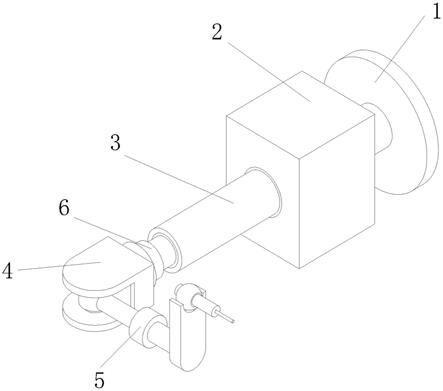
15.图1为本实用新型的立体结构示意图;
16.图2为本实用新型的电动伸缩杆局部立体结构示意图;
17.图3为本实用新型的电动伸缩杆局部正视结构示意图;
18.图4为本实用新型的连接筒立体结构示意图;
19.图5为本实用新型的长块局部剖视结构示意图;
20.图6为本实用新型的连接盘立体结构示意图;
21.图7为本实用新型的输出组件立体结构示意图。
22.图中:1、安装盘;2、安装箱;3、电动伸缩杆;4、连接盘;5、输出组件;6、连接筒;31、长槽;41、螺纹筒;42、转槽;43、连接轴;51、连接套筒;52、连接杆;53、连接板;54、转球;55、焊接头;61、长块;311、限位孔;531、凹槽;611、伸缩块;612、弹簧;613、台阶孔。
具体实施方式
23.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更加全面的描述,附图中给出了本实用新型的若干实施例,但是本实用新型可以通过不同的形式来实现,并不限于文本所描述的实施例,相反的,提供这些实施例是为了使对本实用新型公开的内容更加透彻全面。
24.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上也可以存在居中的元件,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件,本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
25.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常连接的含义相同,本文中在本实用新型的说明书中所使用的术语知识为了描述具体的实施例的目的,不是旨在于限制本实用新型,本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
26.请着重参照附图1-7,一种用于工业自动化加工的焊接机器人,包括安装盘1,所述安装盘1左侧外壁固定连接有安装箱2,所述安装箱2左侧外壁固定连接有电动伸缩杆3,所述电动伸缩杆3左侧固定安装有连接筒6,所述连接筒6左侧设有连接盘4,所述连接盘4右侧
外壁固定连接有螺纹筒41,所述螺纹筒41与连接筒6螺纹连接,所述连接盘4左侧外壁设有转槽42,所述转槽42内壁固定连接有连接轴43,所述连接轴43外壁活动连接有输出组件5,本实用新型通过连接外接控制器实现自动化,通过电动伸缩杆3便于对长度进行调节,通过设置的连接盘4便于调节输出组件5的方位,利用拼装结构,从而有效实现该机器人出现异常时,便于检修更换。
27.请着重参照附图1-7,所述电动伸缩杆3左端外壁对称设有多个长槽31,所述长槽31下端内壁设有限位孔311,所述连接筒6内壁对称一体成型有多个长块61,所述长块61外壁均设有台阶孔613,所述台阶孔613内壁固定连接有弹簧612,所述弹簧612不与台阶孔613内壁接触的一端固定连接有伸缩块611,所述伸缩块611与限位孔311契合,所述输出组件5包括连接套筒51,所述连接筒6活动连接在连接轴43外壁,所述连接套筒51外壁固定连接有连接杆52,所述连接杆52远离连接套筒51的一端固定连接有连接板53,所述连接板53上端设有凹槽531,所述凹槽531内壁活动连接有转球54,所述转球54外壁固定连接有焊接头55,便于调节焊接头55的位置。
28.本实用新型的具体操作方式如下:
29.本实用新型使用时,通过外接控制器控制盖焊接机器人自动焊接,当需要对不同位置进行焊接时,启动电动伸缩杆3伸缩,带动连接盘4伸缩,然后转动连接套筒51,调节输出组件5的位置,转动转球54,带动焊接头55转动,便于调节焊接头55的方位,当该焊接机器人出现异常时,向左侧滑动连接筒6,带动伸缩块611使弹簧612向台阶孔613内收缩,从而使长块61滑出长槽31,进行对电动伸缩杆3分离,然后转动连接筒6,便于将连接筒6从螺纹筒41拆下,从而达到本实用新型通过连接外接控制器实现自动化,通过电动伸缩杆3便于对长度进行调节,通过设置的连接盘4便于调节输出组件5的方位,利用拼装结构,从而有效实现该机器人出现异常时,便于检修更换。
30.上述结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的这种非实质改进,或未经改进将本实用新型的构思和技术方案直接应用于其他场合的,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1