阀门自动加工装配设备的制作方法
1.本实用新型涉及一种阀门生产设备,特别涉及一种阀门自动加工装配设备。
背景技术:
2.参照图1至图3,控制水龙头开关的阀门主要由两部分组成:阀体和阀芯,阀体与阀芯装配在一起时,阀体与阀芯之间存在间隙c,间隙c的大小直接影响阀门的品质,间隙c太小,则阀门的开关不顺畅,间隙c太大,则阀门会的开关会松动,因此需要将控制间隙c大小,间隙c的大小可以通过阀芯装配尺寸a和阀体装配尺寸b之间的差值得出,但由于阀体和阀芯存在制造误差,因此不同阀体与不同阀芯之间的装配误差较大,使间隙c的大小无法保持稳定,阀体的品质无法保持稳定。
技术实现要素:
3.本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种阀门自动加工装配设备,能够减少不同阀门之间的装配误差,使阀门的品质保持稳定。
4.根据本实用新型的第一方面实施例的阀门自动加工装配设备,包括:第一检测机构,包括有第一夹具组件和第一检测装置,所述第一夹具组件用于将所述阀芯送到所述第一检测装置,所述第一检测装置用于检测所述阀芯的尺寸a;第二检测机构,包括有第二夹具组件和第二检测装置,所述第二夹具组件用于将所述阀体送到所述第二检测装置,所述第二检测装置用于检测所述阀体的尺寸b;加工机构,与所述第二检测机构对接,所述第二夹具组件将所述阀体从所述第二检测装置送到所述加工机构,所述加工机构用于加工所述阀体,以使减少所述阀体的尺寸b;移载机构,所述第一夹具组件和所述第二夹具组件依次与所述移载机构对接。
5.根据本实用新型实施例的阀门自动加工装配设备,至少具有如下有益效果:通过第一检测装置和第二检测装置配合,分别测出阀芯的尺寸a和阀体的尺寸b,然后通过加工机构对阀体加工,使阀体的尺寸b减少,使得阀芯的尺寸a和阀体的尺寸b之间的差值符合设定的范围,使阀芯与阀体装配后的间隙c稳定保持稳定,提高阀门品质的稳定性。
6.根据本实用新型的一些实施例,所述第一夹具组件包括有第一夹手和第一驱动组件,所述第一夹手用于夹持所述阀芯,所述第一驱动组件驱动所述第一夹手将所述阀芯从所述移载机构送到所述第一检测装置,以及驱动所述第一夹手将所述阀芯从所述第一检测装置送到所述移载机构。
7.根据本实用新型的一些实施例,所述第一检测装置包括有第一定位座、第二驱动组件和多个第一传感器,所述第一定位座设置有定位平面,多个所述第一传感器竖直设置在所述定位平面,多个所述第一传感器的触头均与所述阀芯抵接,所述第二驱动组件驱动所述阀芯与所述定位平面抵接,以配合所述第一传感器测出所述阀芯的尺寸a。
8.根据本实用新型的一些实施例,所述第二夹具包括有第三驱动组件和第二夹手,
所述第二夹手用于夹持所述阀体,所述第三驱动组件驱动所述第二夹手在所述第二检测装置、所述加工机构以及所述移载机构之间往复运动。
9.根据本实用新型的一些实施例,所述第二检测装置包括有定位平台、第四驱动组件和第二传感器,所述定位平台与所述第二夹手配合定位所述阀体,所述第四驱动组件驱动所述第二传感器沿竖直方向运动,所述第四驱动组件与所述第二传感器配合测量所述阀体的尺寸b。
10.根据本实用新型的一些实施例,所述定位平台开设有第一凹部,所述第一凹部与所述第二夹具组件配合定位所述阀体。
11.根据本实用新型的一些实施例,所述第三驱动组件包括有第一运动模组和第二运动模组,所述第二夹手设置有三组,所述第一运动模组驱动三组所述第二夹手同步沿水平方向运动,所述第二运动模组驱动三组所述第二夹手同步沿竖直方向运动,所述阀门自动加工装配设备设置有第二上料组件,所述第二上料组件与所述第二检测装置对接,所述第二上料组件、所述第二检测装置、所述加工机构以及所述移载机构依次设置。
12.根据本实用新型的一些实施例,所述加工机构包括有加工装置和加工平台,所述第二夹手与所述加工平台配合定位所述阀体,所述加工装置用于加工所述阀体。
13.根据本实用新型的一些实施例,所述加工平台开设有第二凹部,所述第二凹部与所述第二夹具组件配合定位所述阀体。
14.根据本实用新型的一些实施例,所述移载机构包括有第二定位座和转盘,所述第二定位座设置有多个,多个所述第二定位座沿周向设置在所述转盘,所述第一检测机构和所述加工机构围绕所述转盘依次设置,所述第一检测机构和所述加工机构均与所述第二定位座对接。
15.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
16.本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
17.图1为本实用新型实施例中阀芯的示意图;
18.图2为本实用新型实施例中阀体的示意图;
19.图3为本实用新型实施例中阀芯与阀体的装配示意图;
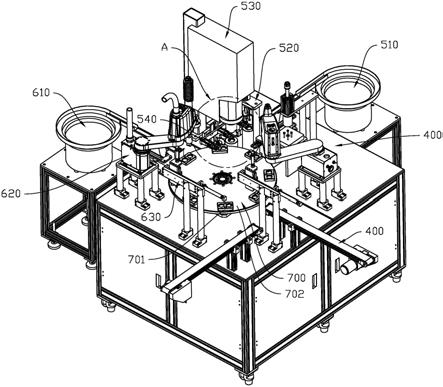
20.图4为本实用新型实施例的阀门自动加工装配设备的示意图;
21.图5为图4中a处的局部放大示意图;
22.图6为本实用新型实施例的阀门自动加工装配设备中第二夹具组件的示意图;
23.图7为本实用新型实施例的阀门自动加工装配设备中第二检测装置的示意图;
24.图8为本实用新型实施例的阀门自动加工装配设备中第一检测机构的示意图;
25.图9为图8中b处的局部放大示意图;
26.图10为本实用新型实施例的阀门自动加工装配设备中第三夹具组件的示意图。
27.附图标记说明:
28.阀芯100、阀体200、阀门300;
29.第一检测机构400、第一检测装置410、第一传感器411、定位平面412、第一定位座413、第一夹具组件420、第一驱动组件421、第一夹手422;
30.第二上料组件510、第二检测装置520、第二传感器521、定位柱522、定位平台523、第一凹部524、第四驱动组件525、加工机构530、加工装置531、加工平台532、第二凹部533、第二夹具组件540、第二夹手541、第二运动模组 542、第一运动模组543;
31.第三上料组件610、装配机构620、吸盘组件621、第三夹具组件622、第五驱动组件623、第三夹手624;
32.移载机构700、第二定位座701、转盘702;
33.第一上料组件800。
具体实施方式
34.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
35.在本实用新型的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
36.在本实用新型的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
37.本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
38.参照图1至图3,阀体200与阀芯100装配在一起时,阀体200与阀芯100 之间会出现间隙c,间隙c的大小可以通过阀芯100装配尺寸a和阀体200装配尺寸b之间的差值得出,间隙c用于放置密封圈,间隙c的大小直接影响密封圈在间隙中松紧程度,直接影响阀门300的品质,间隙c太小,则密封圈安装得紧凑,阀门300的开关不顺畅,间隙c太大,则密封圈安装松动,阀门300会的开关会松动,因此需要将控制间隙c大小,以确保阀门300品质的稳定性。
39.参照图4,本实用新型提供一种阀门自动加工装配设备,包括:移载机构7 00,用于自动输送阀体200和阀芯100;第一上料组件800,用于自动将阀芯10 0逐个送到移载机构700中;第一检测机构400,包括有第一夹具组件420和第一检测装置410,第一夹具组件420用于将阀芯100在移载机构700与第一检测装置410之间往返输送,第一检测装置410用于检测阀芯100的尺寸a;第二检测机构,包括有第二夹具组件540和第二检测装置520,第二检测装置520用于检测阀体200的尺寸b;第二上料组件510,与第二检测装置520对接,第二上料组件510用于将阀体200逐个送出,第二夹具组件540用于将阀体200从第二上料组件510送到第二检测装置520;加工机构530,与第二检测机构对接,第二夹具组件540将阀体200从第
二检测装置520送到加工机构530,加工机构5 30用于加工阀体200,以使减少阀体200的尺寸b,第二夹具组件540将阀体2 00从加工机构530送到移载机构700;装配机构620,与移载机构700对接,用于将组装阀芯100和完成加工的阀体200。需要说明的是,第一上料组件800和第二上料组件510均为振动盘。
40.通过第一上料组件800与第二上料组件510配合,使阀体200和阀芯100 逐个自动送出,并通过第一检测装置410和第二检测装置520配合,测出阀芯1 00的尺寸a和阀体200的尺寸b,然后通过加工机构530将阀体200加工,使阀体200的尺寸b减少,使阀芯100与阀体200装配后的间隙稳定在设定的范围,提高阀门300品质的稳定性,同时通过装配机构620将阀芯100和阀体200自动组装在一起,实现自动化组装,代替手动组装,降低劳动强度,提高生产效率。需要说明的是,阀体200的尺寸b在生产时留有足够的余量,使阀体200的尺寸 b与阀芯100的尺寸a之间的差值必定大于设定的范围,使能够通过对阀体200 进行加工,减少阀体200的尺寸b,使阀体200的尺寸b与阀芯100的尺寸a之间的差值满足设定的范围。
41.具体地,参照图4,第一上料组件800将阀芯100送到移载机构700中,然后通过移载机构700输送到第一检测机构400,第一夹具组件420将阀芯100送到第一检测装置410中,通过第一检测装置410测出阀芯100的尺寸a,同时第二上料组件510将阀体200逐个送出,并通过第二夹具组件540送到第二检测装置520中,通过第二检测装置520测出阀体200的尺寸b,然后第二夹具组件5 40将阀体200从第二检测装置520送到加工机构530中,通过对阀体200进行加工,使阀体200的尺寸b减少,使阀芯100的尺寸a与阀体200的尺寸b之间的差值,即间隙c在设定范围内,然后第二夹具组件540将经过加工的阀体200 送到移栽机构中,并通过移载机构700送到装配机构620,并在装配机构620完成阀芯100和阀体200之间的组装,使每个完成组装的阀门300均在同一设定的误差范围内,提高阀门300的品质稳定性,同时通过自动组装阀芯100和阀体2 00,提高生产效率。
42.在一些实施例中,参照图8,第一夹具组件420包括有第一夹手422和第一驱动组件421,第一夹手422用于夹持阀芯100,第一驱动组件421驱动第一夹手422将阀芯100从移载机构700送到第一检测装置410,以及驱动第一夹手4 22将阀芯100从第一检测装置410送到移载机构700。具体地,第一夹手422 可以是夹手气缸,也可以是软体手指,通过第一驱动组件421驱动第一夹手422 靠近移载机构700上的阀芯100,使第一夹手422能够夹取阀芯100,并将阀芯 100移送到第一检测装置410中,实现自动送料,代替手动送料,方便快捷,降低劳动强度,同时提高效率。需要说明的是,第一驱动组件421可以是机械臂,也可以通过气缸之间的相互配合,实现水平竖直方向的运动。
43.在一些实施例中,参照图8和图9,第一检测装置410包括有第一定位座4 13、第二驱动组件414和多个第一传感器411,第一定位座413设置有定位平面 412,多个第一传感器411竖直设置在定位平面412,多个第一传感器411配合形成用于测量阀芯100的尺寸a的测量部,第二驱动组件414驱动阀芯100与定位平面412抵接。阀芯100尺寸a的起始测量部位与第一传感器411的触头接触,使测量时,第一传感器411的触头即为测量的起点,另外多个第一传感器411 配合将阀芯100托起,同时使阀芯100保持平衡,减少各个第一传感器411之间的测量误差,然后第二驱动组件414驱动阀芯100向定位平面412移动,并最终阀芯100的底部与定位平面412接触,设定定位平面412为零点,此时第一传感器411的触头与定位平面412之间的距离即为阀芯100尺寸a,实现阀芯100尺寸a的测量,方便快捷。可以理解的是,第
一传感器411为接触式传感器,通过将定位平面412设置为零点,使阀芯100与定位平面412接触时,第一传感器4 11的触头与定位平面412的之间的距离即为阀芯100尺寸a,此外,第一驱动组件421在驱动阀芯100移动时,第一驱动组件421与第一传感器411的触头一直保持分离状态,避免影响第一传感器411的测量精度。需要说明的是,第二驱动组件414可以是气缸,也可以是电推杆。
44.在一些实施例中,参照图5和图6,第二夹具包括有第三驱动组件和第二夹手541,第二夹手541用于夹持阀体200,第三驱动组件驱动第二夹手541在第二上料组件510、第二检测装置520、加工机构530以及移载机构700之间往复运动。通过第二夹手541将阀体200夹持,同时配合第三驱动组件,使第二夹手 541在第二上料组件510、第二检测装置520、加工机构530以及移载机构700 之间往返运动,实现阀体200在第二上料组件510、第二检测装置520、加工机构530以及移载机构700之间的转移,方便灵活,减少机构设置,便于维护。
45.在一些实施例中,参照图7,第二检测装置520包括有定位平台523、第四驱动组件525和第二传感器521,定位平台523与第二夹手541配合定位阀体2 00,第四驱动组件525驱动第二传感器521沿竖直方向运动,第四驱动组件525 与第二传感器521配合测量阀体200的尺寸b。定位平台523开设有第一凹部5 24,第一凹部524与阀体200匹配,第二夹具将阀体200放置在第一凹部524 中,并保持对阀体200的夹持,实现阀体200的定位,然后第四驱动组件525 驱动第二传感器521往靠近阀体200的方向运动,使第二传感器521的触头与阀体200尺寸b的起始测量部位接触,第四驱动组件525设置有定位柱522,第二传感器521的触头与阀体200尺寸b的起始测量部位接触后,第四驱动组件525 继续驱动定位柱522移动,直到定位柱522与阀体200的底部接触,使得测出阀体200尺寸b的大小。需要说明的是,第二传感器521为接触式传感器。
46.在一些实施例中,参照图6,第三驱动组件包括有第一运动模组543和第二运动模组542,第二夹手541设置有三组,第一运动模组543驱动三组第二夹手 541同步沿水平方向运动,第二运动模组542驱动三组第二夹手541同步沿竖直方向运动,第二上料组件510、第二检测装置520、加工机构530以及移载机构 700依次设置。第二运动模组542驱使第二夹手541能够将阀体200举起或放下,第一运动模组543使第二夹手541能够在第二上料组件510、第二检测装置520、加工机构530以及移载机构700之间往复运动,实现阀体200在上述机构之间的转移,第一运动模组543和第二运动模组542可以是气缸滑台模组,也可以是电机滑台模组,第二夹手541设置有三个,三个第二夹手541沿水平方向间隔设置,三个第二夹手541同步运动,使三个第二夹手541能同时夹起阀体200,实现多个阀体200的同步转移,方便快捷,提高生产效率。
47.在一些实施例中,参照图5,加工机构530包括有加工装置531和加工平台 532,第二夹手541与加工平台532配合定位阀体200,加工装置531用于加工阀体200。加工平台532设置有第二凹部533,第二凹部533与阀体200匹配,第二夹手541与第三驱动组件配合将阀体200放进第二凹部533,同时第二夹手 541保持对阀体200的夹持,实现加工前的定位,然后加工装置531对阀体200 的进行加工,减少阀体200的尺寸b,使阀体200的尺寸b与阀芯100的尺寸a 之间的差值间隙c达到设定值。需要说明的是,加工装置531为超声波打磨装置。
48.在一些实施例中,参照图4,移载机构700包括有转动设置的转盘702和第二定位座
701,第二定位座701设置有多个,多个第二定位座701沿周向设置在转盘702,第一上料组件800、第一检测机构400、加工机构530以及装配机构6 20围绕转盘702依次设置,并分别与第二定位座701对接。通过设置转盘702,并将第一上料组件800、第一检测机构400、加工机构530以及装配机构620围绕转盘702设置,使该阀门300自动加工装配设备结构紧凑,减少占地面积,同时通过设置多个第二定位座701,使阀芯100和阀体200能够连续输送,提高生产效率,另外第二定位座701用于定位阀芯100和阀体200,使转盘702转动时,避免阀芯100和阀体200从转盘702上掉落。
49.在一些实施例中,参照图4,装配机构620包括有第三上料组件610和吸盘组件621,第三上料组件610用于将密封圈逐个送出,吸盘组件621用于将密封圈装入阀体200中。移载机构700将阀芯100和阀体200送到装配机构620,然后吸盘组件621将密封圈放到阀体200中,实现阀体200与密封圈的自动组装,提高生产效率。可以理解的是,吸盘组件621包括有机械臂和吸盘,通过机械臂驱动吸盘运动,使吸盘能够将密封圈抓起和放下,方便快捷。需要说明的是,第三上料组件610为振动盘。
50.在一些实施例中,参照图4和图10,装配机构620还包括有第三夹具组件6 22,第三夹具组件622用于将阀芯100装进阀体200中。第三夹具组件622包括有第三夹手624和第五驱动组件623,第五驱动组件623驱动第三夹手624将阀芯100从定位座夹起,然后将阀芯100放进阀体200中,实现阀芯100与阀体2 00的自动组装,提高组装效率。需要说明的是,第五驱动组件623可以是机械臂,也可以是电机滑台模组,或者气缸滑台模组。装配完成,可通过输送设备将阀门300送出。
51.上面结合附图对本实用新型实施例作了详细说明,但是本实用新型不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1