一种高精度焊缝跟踪装置的制作方法
1.本技术涉及焊接的领域,尤其是涉及一种高精度焊缝跟踪装置。
背景技术:
2.激光焊接是利用高能量的激光脉冲对材料进行微小区域内的局部加热,激光辐射的能量通过热传导向材料的内部扩散,将材料熔化后形成特定熔池,它是一种新型的焊接方式。
3.现有的激光焊缝跟踪,主要是指使用激光器、光学传感器和中央处理器等利用光学传播与成像原理,得到激光扫描区域内各个点的位置信息,通过复杂的程序算法完成对常见焊缝的在线实时检测;通过计算检测到的焊缝与焊枪之间的偏差,引导运动执行机构实时纠正偏差,以精确引导焊枪自动焊接,从而实现对焊接过程中焊缝的智能实时跟踪,但在实际生产操作中,自由度机械臂的转向始终存在误差,在机械臂移动的过程中,若无矫正参照物,则激光焊缝跟踪存在的误差会一直接影响焊接效果,所以本实用新型的提出解决了上述技术问题的不足。
技术实现要素:
4.为了解决现有的激光焊缝跟踪过程中缺少矫正参照物,则激光焊缝跟踪存在的误差会一直接影响焊接效果的技术问题,本技术提供一种高精度焊缝跟踪装置。
5.本技术提供一种高精度焊缝跟踪装置,采用如下的技术方案:
6.一种高精度焊缝跟踪装置,包括自由度机械臂、工作平台,所述自由度机械臂的转动臂表面固定连接有焊枪,所述工作平台的中部上表面固定连接有待焊缝板,所述待焊缝板的中部上表面开设有焊缝点;
7.所述待焊缝板的两侧设置有定位跟踪装置,所述定位追踪装置包括移动反射板,所述移动反射板随所述焊枪的移动而移动,使焊枪处于焊缝点正中间上方进行移动。
8.可选的,所述焊枪的外表面通过安装环固定连接有激光焊缝跟踪器,所述焊枪的底端外表面通过安装环固定连接有激光测距传感器。
9.通过采用上述技术方案,自由度机械臂带动焊枪进行工作,激光焊缝跟踪器安装在自由度机械臂上,用以控制自由度机械臂带动焊枪跟踪焊缝点,激光测距传感器相对设置有两个,并分别与移动反射板相对,激光测距传感器可以检测焊枪的两侧与两个移动反射板表面之间的距离,且移动反射板对称设置在焊缝点的两侧,因而移动反射板随着焊枪的移动,可以使焊枪始终保持正中间直线运动。
10.可选的,所述工作平台的两端上表面均固定连接有平行滑轨,所述平行滑轨的外表面滑动卡接有支撑滑块,所述支撑滑块的上表面与所述移动反射板的下表面固定连接。
11.通过采用上述技术方案,平行滑轨均与焊缝点平行设置,且两侧的平行滑轨到达焊缝点的距离相等,移动反射板呈t型设置,且朝向是对着焊缝点,支撑滑块对移动反射板进行支撑,并带动移动反射板在平行滑轨的外表面滑动,且平行滑轨的长度与待焊缝板的
长度一致。
12.可选的,所述工作平台的一侧表面固定连接有挡板,所述平行滑轨的一侧表面固定连接有限位板,所述平行滑轨的中部设置有固定齿条,所述固定齿条的下表面与所述工作平台的上表面固定连接,所述移动反射板的中部下表面固定连接有移动齿条。
13.通过采用上述技术方案,挡板与限位板均对支撑滑块的移动位置进行限位,支撑滑块的一侧表面与限位板的一侧表面接触时,即为焊缝点焊缝的起点,支撑滑块的另一侧表面与挡板的一侧表面接触时,即为焊缝点焊缝的终点,固定齿条与移动齿条的长度相等,移动反射板的下表面与移动齿条的前端上表面固定。
14.可选的,所述工作平台的一端上表面固定连接有驱动底座,所述驱动底座的上表面开设有支撑滑槽,所述支撑滑槽的内壁与所述移动齿条的外表面滑动连接。
15.通过采用上述技术方案,驱动底座上表面开设的滑槽与移动齿条的外表面相适配,由于移动齿条延伸出平行滑轨的一侧,所以依靠驱动底座上表面的支撑滑槽进行承重支撑。
16.可选的,所述驱动底座的内部设置有液压杆,所述液压杆的一侧表面固定连接有铰接耳板,所述铰接耳板的表面通过连接轴活动连接有驱动齿轮,所述驱动齿轮的外表面分别与所述固定齿条的外表面及所述移动齿条的外表面啮合。
17.通过采用上述技术方案,驱动底座内部的控制件控制液压杆工作,从而由铰接耳板带动驱动齿轮向前推动,驱动齿轮在固定齿条的表面进行转动前进,从而驱动齿轮带动移动齿条向前运动,进而带动由移动反射板连接的支撑滑块在平行滑轨的外表面进行向前滑动,液压杆的推动与焊枪的移动移至,从而便于焊枪外表面的激光测距传感器的激光始终与移动反射板表面进行照射。
18.综上所述,本技术包括以下至少一种有益技术效果:
19.通过设置定位跟踪装置,使焊枪的移动轨迹始终保持正确的轨迹进行移动,从而提供高精度的激光焊缝跟踪,在调节的过程中,通过驱动底座内部的控制件控制液压杆工作,从而由铰接耳板带动驱动齿轮向前推动,驱动齿轮在固定齿条的表面进行转动前进,从而驱动齿轮带动移动齿条向前运动,进而带动由移动反射板连接的支撑滑块在平行滑轨的外表面进行向前滑动,液压杆的推动与焊枪的移动一致,从而便于焊枪外表面的激光测距传感器的激光始终与移动反射板表面进行照射,从而建立了自由度机械臂带动焊枪移动的矫正参照物,提高了激光焊缝跟踪的精度。
附图说明
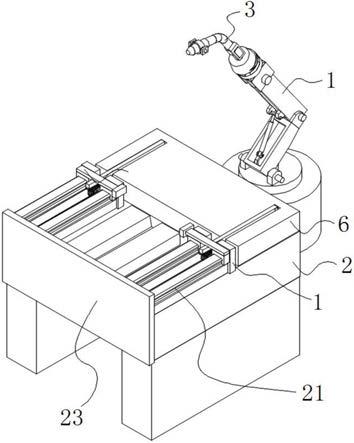
20.图1是本实用新型提出的一种高精度焊缝跟踪装置的示意图;
21.图2是本实用新型提出的一种高精度焊缝跟踪装置的工作平台结构立体图;
22.图3是本实用新型提出的一种高精度焊缝跟踪装置的焊枪结构立体图;
23.图4是本实用新型提出的一种高精度焊缝跟踪装置的移动反射板结构立体图;
24.图5是本实用新型提出的一种高精度焊缝跟踪装置的驱动齿轮结构立体图。
25.图中:1、自由度机械臂;2、工作平台;21、平行滑轨;22、支撑滑块;23、挡板;24、限位板;25、固定齿条;3、焊枪;31、激光焊缝跟踪器;32、激光测距传感器;4、待焊缝板;41、焊缝点;5、移动反射板;51、移动齿条;6、驱动底座;61、支撑滑槽;62、液压杆;63、铰接耳板;
64、驱动齿轮。
具体实施方式
26.以下结合附图1-5对本技术作进一步详细说明。
27.一种高精度焊缝跟踪装置,包括自由度机械臂1、工作平台2,自由度机械臂1的转动臂表面固定连接有焊枪3,工作平台2的中部上表面固定连接有待焊缝板4,待焊缝板4的中部上表面开设有焊缝点41;
28.待焊缝板4的两侧设置有定位跟踪装置,定位追踪装置包括移动反射板5,移动反射板5随焊枪3的移动而移动,使焊枪3处于焊缝点41正中间上方进行移动;
29.焊枪3的外表面通过安装环固定连接有激光焊缝跟踪器31,焊枪3的底端外表面通过安装环固定连接有激光测距传感器32,自由度机械臂1带动焊枪3进行工作,激光焊缝跟踪器31安装在自由度机械臂1上,用以控制自由度机械臂1带动焊枪3跟踪焊缝点41,激光测距传感器32相对设置有两个,并分别与移动反射板5相对,激光测距传感器32可以检测焊枪3的两侧与两个移动反射板5表面之间的距离,且移动反射板5对称设置在焊缝点41的两侧,因而移动反射板5随着焊枪3的移动,可以使焊枪3始终保持正中间直线运动;
30.工作平台2的两端上表面均固定连接有平行滑轨21,平行滑轨21的外表面滑动卡接有支撑滑块22,支撑滑块22的上表面与移动反射板5的下表面固定连接,平行滑轨21均与焊缝点41平行设置,且两侧的平行滑轨21到达焊缝点41的距离相等,移动反射板5呈t型设置,且朝向是对着焊缝点41,支撑滑块22对移动反射板5进行支撑,并带动移动反射板5在平行滑轨21的外表面滑动,且平行滑轨21的长度与待焊缝板4的长度一致;
31.工作平台2的一侧表面固定连接有挡板23,平行滑轨21的一侧表面固定连接有限位板24,平行滑轨21的中部设置有固定齿条25,固定齿条25的下表面与工作平台2的上表面固定连接,移动反射板5的中部下表面固定连接有移动齿条51,挡板23与限位板24均对支撑滑块22的移动位置进行限位,支撑滑块22的一侧表面与限位板24的一侧表面接触时,即为焊缝点41焊缝的起点,支撑滑块22的另一侧表面与挡板23的一侧表面接触时,即为焊缝点41焊缝的终点,固定齿条25与移动齿条51的长度相等,移动反射板5的下表面与移动齿条51的前端上表面固定。
32.工作平台2的一端上表面固定连接有驱动底座6,驱动底座6的上表面开设有支撑滑槽61,支撑滑槽61的内壁与移动齿条51的外表面滑动连接,驱动底座6上表面开设的滑槽与移动齿条51的外表面相适配,由于移动齿条51延伸出平行滑轨21的一侧,所以依靠驱动底座6上表面的支撑滑槽61进行承重支撑;
33.驱动底座6的内部设置有液压杆62,液压杆62的一侧表面固定连接有铰接耳板63,铰接耳板63的表面通过连接轴活动连接有驱动齿轮64,驱动齿轮64的外表面分别与固定齿条25的外表面及移动齿条51的外表面啮合,驱动底座6内部的控制件控制液压杆62工作,从而由铰接耳板63带动驱动齿轮64向前推动,驱动齿轮64在固定齿条25的表面进行转动前进,从而驱动齿轮64带动移动齿条51向前运动,进而带动由移动反射板5连接的支撑滑块22在平行滑轨21的外表面进行向前滑动,液压杆62的推动与焊枪3的移动移至,从而便于焊枪3外表面的激光测距传感器32的激光始终与移动反射板5表面进行照射;
34.通过设置定位跟踪装置,使焊枪3的移动轨迹始终保持正确的轨迹进行移动,从而
提供高精度的激光焊缝跟踪,在调节的过程中,通过驱动底座6内部的控制件控制液压杆62工作,从而由铰接耳板63带动驱动齿轮64向前推动,驱动齿轮64在固定齿条25的表面进行转动前进,从而驱动齿轮64带动移动齿条51向前运动,进而带动由移动反射板5连接的支撑滑块22在平行滑轨21的外表面进行向前滑动,液压杆62的推动与焊枪3的移动一致,从而便于焊枪3外表面的激光测距传感器32的激光始终与移动反射板5表面进行照射,从而建立了自由度机械臂1带动焊枪3移动的矫正参照物,提高了激光焊缝跟踪的精度。
35.工作原理:本实用新型在具体的实施例中,通过光焊缝跟踪器安装在自由度机械臂1上,用以控制自由度机械臂1带动焊枪3跟踪焊缝点41,自由度机械臂1上的激光测距传感器32的激光照射在移动反射板5表面;
36.当自由度机械臂1带动焊枪3进行移动时,驱动底座6内部的液压杆62工作,由铰接耳板63带动驱动齿轮64向前推动,驱动齿轮64在固定齿条25的表面进行转动前进,从而驱动齿轮64带动移动齿条51向前运动,进而带动由移动反射板5连接的支撑滑块22在平行滑轨21的外表面进行向前滑动,液压杆62的推动与焊枪3的移动移至,从而便于焊枪3外表面的激光测距传感器32的激光始终与移动反射板5表面进行照射,使自由度机械臂1自动调节以保持高精度移动。
37.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1