一种卡簧自动安装装置的制作方法
1.本实用新型属于卡簧安装技术领域,具体涉及一种卡簧自动安装装置。
背景技术:
2.在卡簧的安装过程中,传统人工安装或非自动安装方式,难以在轴的卡环槽或者孔的卡环槽的轴向上准确定位,安装效率低且所需成本高,安装过程中容易产生划痕;现有机器难以既可安装孔用卡簧又可安装轴用卡簧。
技术实现要素:
3.针对现有技术中存在不足,本实用新型提供了一种卡簧自动安装装置,实现自动、快速、准确安装卡簧,同时可以通过适量调整,同时实现安装孔用卡簧和轴用卡簧。
4.本实用新型是通过以下技术手段实现上述技术目的的。
5.一种卡簧自动安装装置,包括:
6.待安装件固定部分,包括支撑垫块和固定块,支撑垫块上安装固定块,固定块上安装待安装件,待安装件上开设有卡簧安装槽;
7.取料安装部分,包括支撑架ⅰ、支撑架ⅲ、支撑架ⅳ、气缸ⅱ、气缸ⅲ、伺服电机、动力传动机构和夹头;所述支撑架ⅲ滑动连接在支撑架ⅰ一侧,安装在支撑架ⅰ上的气缸ⅱ与支撑架ⅲ顶端固连,安装在所述支撑架ⅲ上的气缸ⅲ与支撑架ⅳ顶端固连,所述支撑架ⅳ顶端设有圆柱导杆,支撑架ⅳ通过圆柱导杆在支撑架ⅲ的导向孔中滑动;所述支撑架ⅳ上安装伺服电机,伺服电机与动力传动机构连接,动力传动机构底端安装有对称设置的一对夹头;所述待安装件固定部分位于支撑架ⅳ下方;
8.送料部分,包括放料桶、支撑架ⅱ和气缸ⅰ,放料桶安装在支撑架ⅰ上,支撑架ⅱ上安装气缸ⅰ,气缸ⅰ连接送料板一端,送料板另一端与安装在导轨ⅱ上的滑块ⅱ连接;所述送料板上开设有槽口,槽口与放料桶底端对齐。
9.上述技术方案中,还包括控制器,用于控制伺服电机、气缸ⅰ、气缸ⅱ和气缸ⅲ工作。
10.上述技术方案中,所述动力传动机构包括齿轮ⅰ、齿轮ⅱ、齿轮ⅲ,齿轮ⅰ与齿轮ⅱ啮合,齿轮ⅱ与齿轮ⅲ啮合,齿轮ⅱ、齿轮ⅲ分别通过齿轮轴ⅰ、齿轮轴ⅱ连接偏心轮ⅰ和偏向轮ⅱ,偏心轮ⅰ、偏心轮ⅱ上分别安装有夹头。
11.上述技术方案中,所述支撑架ⅳ底部安装有激光测距传感器。
12.上述技术方案中,所述伺服电机的传动轴与力矩传感器连接,力矩传感器与齿轮ⅰ连接。
13.上述技术方案中,所述力矩传感器和激光测距传感器采集的信息传输给控制器。
14.上述技术方案中,所述卡簧安装槽中心与偏心轮ⅰ、偏心轮ⅱ中点连线的中心位置,在竖直方向上同轴。
15.上述技术方案中,所述固定块和支撑垫块底端均设有长孔槽,且固定块上的长孔
槽与支撑垫块的长孔槽相互垂直。
16.上述技术方案中,所述放料桶为非封闭的柱筒,且正面开有槽口。
17.上述技术方案中,所述槽口的高度小于待装卡簧的厚度,槽口的直径与待装卡簧的外径相同。
18.本实用新型的有益效果为:本实用新型中的待装卡簧先在气缸ⅰ的带动下向靠近卡簧安装槽方向移动,直至待装卡簧中心与卡簧安装槽中心在竖直方向上同轴,气缸ⅱ再工作,使得夹头插入待装卡簧的夹持孔中,伺服电机开始工作,带动动力传动机构工作,使得夹头夹持压紧待测卡簧,最后气缸ⅲ工作,推动支撑架ⅳ及其上连接的部分沿圆柱导杆向下运动,直至待装卡簧底端与卡簧安装槽底端接触,伺服电机反向转动,待装卡簧安装到卡簧安装槽中。本实用新型能够实现卡簧的自动、快速、准确安装。
附图说明
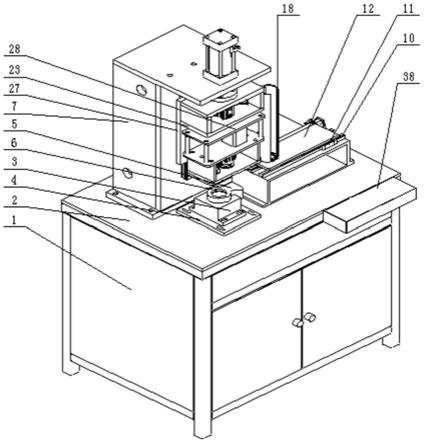
19.图1为本实用新型所述卡簧自动安装装置立体图;
20.图2为本实用新型所述卡簧自动安装装置主视图;
21.图3为本实用新型所述卡簧自动安装装置侧视图;
22.图4为本实用新型所述卡簧自动安装装置后视图;
23.图5为本实用新型所述送料部分结构示意图;
24.图中,1-箱体,2-工作台,3-固定块,4-支撑垫块,5-待安装件,6-卡簧安装槽,7-支撑架ⅰ,8-导轨ⅰ,9-滑块ⅰ,10-导轨ⅱ,11-滑块ⅱ,12-送料板,13-气缸ⅰ,14-连接块ⅰ,15-支撑架ⅱ,16-槽口,17-待装卡簧,18-放料桶,19-气缸ⅱ,20-连接块ⅱ,21-气缸ⅲ,22
‑ꢀ
圆柱导杆,23-支撑架ⅲ,24-直线轴承,25-滚动轴承,26-连接块ⅲ,27-支撑板,28-支撑架ⅳ,29-伺服电机,30-齿轮ⅰ,31-齿轮ⅱ,32-齿轮ⅲ,33-偏心轮ⅱ,34-偏心轮ⅰ,35-齿轮轴ⅰ,36-齿轮轴ⅱ,37-夹头,38-控制器,39-力矩传感器,40-激光测距传感器,41-放料桶支撑架。
具体实施方式
25.下面结合附图以及具体实施例对本实用新型作进一步的说明,但本实用新型的保护范围并不限于此。
26.如图1、2、3、4所示,本实用新型所述卡簧自动安装装置包括待安装件固定部分、取料安装部分、送料部分和控制部分。
27.待安装件固定部分包括工作台2、支撑垫块4和固定块3,支撑垫块4通过螺钉安装在工作台2上,工作台2固定箱体1上方,支撑垫块4上通过螺钉安装固定块3,固定块3上开设有安装槽,用于安装待安装件5,待安装件5开设有卡簧安装槽6。固定块3、支撑垫块4 底端均设有长孔槽,且固定块3上的长孔槽与支撑垫块4的长孔槽相互垂直,可调整固定块 3与支撑垫块4的相对位置或支撑垫块4与工作台2的相对位置。
28.取料安装部分包括支撑架ⅰ7、导轨ⅰ8、滑块ⅰ9、支撑板27、支撑架ⅲ23、支撑架
ⅳꢀ
28、气缸ⅱ19、连接块ⅱ20、气缸ⅲ21、直线轴承24、圆柱导杆22、连接块ⅲ26、伺服电机 29、齿轮ⅰ30、齿轮ⅱ31、齿轮ⅲ32、齿轮轴ⅰ35、齿轮轴ⅱ36、滚动轴承25、偏心轮ⅰ34、偏心轮ⅱ33和夹头37;待安装件固定部分位于支撑架ⅳ28下方。支撑架ⅰ7通过螺钉安装在工作台2
上,支撑架ⅰ7内板上安装导轨ⅰ8,导轨ⅰ8上安装滑块ⅰ9,滑块ⅰ9上安装支撑板27,支撑板27与支撑架ⅲ23连接;支撑架ⅰ7顶端上安装气缸ⅱ19,气缸ⅱ19的活塞杆与连接块ⅱ20连接,连接块ⅱ20与支撑架ⅲ23顶端固定连接,因此,气缸ⅱ19的活塞杆推动支撑板27沿导轨ⅰ8做直线移动;支撑架ⅲ23上安装气缸ⅲ21,气缸ⅲ21的活塞杆与连接块ⅲ26连接,连接块ⅲ26与支撑架ⅳ28顶端固定连接,支撑架ⅳ28顶端安装有一对圆柱导杆22,圆柱导杆22通过直线轴承24在支撑架ⅲ23的导向孔中滑动,故气缸ⅲ21的活塞杆推动连接块ⅲ26沿圆柱导杆22上下移动;支撑架ⅳ28上安装伺服电机29、齿轮ⅰ30、齿轮ⅱ31、齿轮ⅲ32、齿轮轴ⅰ35、齿轮轴ⅱ36、滚动轴承25和力矩传感器39,伺服电机29 的传动轴与力矩传感器39连接,力矩传感器39与齿轮ⅰ30连接,齿轮ⅰ30与齿轮ⅱ31啮合,齿轮ⅱ31与齿轮ⅲ32啮合,齿轮ⅱ31、齿轮ⅲ32分别安装在齿轮轴ⅰ35、齿轮轴ⅱ36 上,齿轮轴ⅰ35、齿轮轴ⅱ36分别通过滚动轴承25安装在支撑架ⅳ28上;齿轮轴ⅰ35、齿轮轴ⅱ36下端分别与偏心轮ⅰ34、偏心轮ⅱ33连接,偏心轮ⅰ34、偏心轮ⅱ33上分别安装有夹头37,两个夹头37对称设置;支撑架ⅳ28底部安装有激光测距传感器40,用于测量工作时待装卡簧17与工作台2的距离,再通过气缸ⅲ21控制待装卡簧17下降的位置;力矩传感器39判断夹头37是否夹持到待装卡簧17,以及判断待装卡簧17在放入卡簧安装槽6内是否出现脱落,若出现空夹或者脱落,则控制器进行报警。
29.如图4、5(图5是从整个装置后方角度看到的)所示,送料部分包括放料桶18、放料桶支撑架41、送料板12、气缸ⅰ13、连接块ⅰ14、支撑架ⅱ15、导轨ⅱ10和滑块ⅱ11;支撑架ⅱ15安装在工作台2上,支撑架ⅱ15上安装气缸ⅰ13、导轨ⅱ10,连接块ⅰ14分别与气缸ⅰ13的活塞杆、送料板12一端连接,送料板12另一端与滑块ⅱ11连接,滑块ⅱ11安装在导轨ⅱ10上,放料桶18通过放料桶支撑架41安装在支撑架ⅰ7上;放料桶18为非封闭的柱筒,其正面开有槽口,便于操作人员观察桶内待装卡簧17的数量,及时补充待装卡簧17,且在需取出待装卡簧17时可以通过槽口取出,方便操作;当安装孔用卡簧时,放料桶18内孔需设置挡块,用于固定孔用卡簧夹持孔的位置;当安装轴用卡簧时,无需设置挡块,使用放料桶18的槽口固定轴用卡簧夹持孔的位置;送料板12上开设有槽口16,槽口16与放料桶18底端对齐,且槽口16的高度小于一个待装卡簧17的厚度,槽口16的直径与待装卡簧 17的外径相同,实际使用时,槽口16的尺寸根据不同的待装卡簧17进行更换,即更换整个送料板12。
30.控制部分,即控制器,力矩传感器39和激光测距传感器40采集的信息传输给控制器,控制器控制伺服电机29、气缸ⅰ13、气缸ⅱ19和气缸ⅲ21工作。
31.本实用新型所述卡簧自动安装装置的使用方法为:
32.根据待安装件5的型号和尺寸选择合适的固定块3,固定块3安装在支撑垫块4上,支撑垫块4安装在工作台2上,调整固定块3和支撑垫块4的位置,使卡簧安装槽6中心与偏心轮ⅰ34、偏心轮ⅱ33中点连线的中心位置在竖直方向上同轴;选择待装卡簧17配套的放料桶18及送料板12,安装完毕后,将待装卡簧17放置到放料桶18中,同时落入槽口16中,气缸ⅰ13工作推动连接块ⅰ14和送料板12沿导轨ⅱ10向靠近卡簧安装槽6方向移动,气缸ⅰ13运行达到设定行程后停止工作,待装卡簧17中心与卡簧安装槽6中心在竖直方向上同轴;此时气缸ⅱ19开始工作,推动连接块ⅱ20及与连接块ⅱ20连接的部分在滑块ⅰ9的带动下沿导轨ⅰ8向下滑动,气缸ⅱ19的活塞杆运行到设定位移长度后,即夹头37插入待装卡簧 17的夹持孔中,气缸ⅱ19活塞杆停止推进;伺服电机29开始工作,带动齿轮ⅰ30旋转,进而带动齿轮ⅱ31旋转,齿轮ⅱ31与齿轮ⅲ32啮合带动齿轮ⅲ32反向旋转,齿轮ⅱ31与齿轮ⅲ32分别带动齿
轮轴ⅰ35、齿轮轴ⅱ36反向旋转,则偏心轮ⅰ34、偏心轮ⅱ33反向旋转,使得夹头37夹持压紧待测卡簧17,夹持后,气缸ⅰ13的活塞杆反向运动复位,夹头37夹持待装卡簧17后,气缸ⅲ21开始工作,推动支撑架ⅳ28及其上连接的部分沿圆柱导杆22向下运动,直至激光位移传感器40反馈待装卡簧17底端与卡簧安装槽6底端接触,气缸ⅲ21停止工作,伺服电机29反向转动,待装卡簧17安装到卡簧安装槽6后,气缸ⅱ19、气缸ⅲ21 的活塞杆复位,取下待安装件5等待下一个工作循环。
33.所述实施例为本实用新型的优选的实施方式,但本实用新型并不限于上述实施方式,在不背离本实用新型的实质内容的情况下,本领域技术人员能够做出的任何显而易见的改进、替换或变型均属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1