一种自动对位锁螺丝机的制作方法
1.本实用新型涉及一种自动对位锁螺丝机。
背景技术:
2.自动锁螺丝机是用自动化机构代替人手完成螺丝的拧紧的自动化装置,在国内外均已得到广泛应用,其主要应用于汽车零部件生产、电脑、显示屏、电机、灯具、手机、打印机、电路板、电池、仪表等的自动组装,可以大大提高生产效率,降低生产成本,提高可靠性。
3.然而目前对于传统的生产线,螺丝大多为手动锁附,不仅效率低下、人工成本高,而且不容易对准造成重新返工的可能性提高。因此对于电子产品的质量要求越来越高当今社会,提高产品组装的质量和精度迫在眉睫。
技术实现要素:
4.本实用新型的目的在于克服现有技术中存在的缺点,提供一种可以实现精准定位的锁螺丝机。为了实现上述目的,本实用新型采用的技术方案如下:
5.一种自动对位锁螺丝机,其特征在于包括:
6.底座;
7.产品固定模组,设置在所述底座上,用于固定需要连接螺丝的上部产品;
8.锁螺丝模组,固定在所述底座上且位于所述产品固定模组的上方;设置锁螺丝枪及其移动机构和相机;
9.距离测量模组,位于所述产品固定模组附近,用于获取需要连接螺丝的上部产品和下部产品的竖直方向和角度偏差,包括多个激光测距器;
10.相机拍摄模组,位于所述产品固定模组的附近,用于获取需要连接螺丝的上部产品和下部产品的水平方向的偏差;
11.自动对位模组,位于所述产品固定模组下方,用于固定需要连接螺丝的下部产品,并根据所述距离测量模组和所述相机拍摄模组获取的偏差信息对产品自动对位矫正位置。
12.进一步的,所述距离测量模组设置四个激光测距器,分别对应于所述产品固定模块的四角且同时对应地测量产品的四角。
13.进一步的,激光测距器安装在位移机构上,而能够调节激光测距器之间的在xy轴的相对位置。
14.进一步的,所述相机拍摄模组为两组,分别位于所述产品固定模组的相对两侧,每组所述相机拍摄模组同时获取产品的相对两侧偏差信息。
15.进一步的,所述锁螺丝模组中,锁螺丝枪配置相机,自动螺丝枪连接在xyz轴移动机构上,xyz轴移动机构包括y轴移动机构、x轴移动机构和z轴移动机构,各轴移动机构均设置其驱动电机,根据自动螺丝枪配置的相机拍摄产品上的螺丝位置,引导锁螺丝枪走到对应螺丝的正上方。
16.进一步的,产品固定模组包括由气缸驱动的左右方向上的夹持机构、与左右移动
机构连接的后部夹持部件以及由气缸驱动而能前后运动的前部夹持部件,后部夹持部件和前部夹持部件形成前后方向上的夹持机构。
17.进一步的,所述自动对位模组设置载物平台,用于放置下部产品,所述载物平台安装在位移机构上,所述位移机构设置x轴移动机构、y轴移动机构和z轴移动机构,x轴移动机构、y轴移动机构和z轴移动机构分别设置驱动机构而能根据距离测量模组和相机拍摄模组获取的偏差信息对载物平台自动对位矫正位置,直至下部产品和上部产品之间的相对位置达到要求位置。
18.进一步的,所述自动对位模组还设置产品的定位结构,包括吸盘,左右夹持机构和前部限位机构,所述前部限位机构与位移机构连接而能够前后移动,推动下部产品到位。
19.进一步的,所述自动对位锁螺丝机还包括位于所述产品固定模组上方的扫码模组;所述扫码模组自动获取产品上二维码或者条形码,并将产品和调整数据绑定,用于后期的追踪。
20.进一步的,包括箱体,所述箱体正面开设有放料口,所述放料口对应所述产品固定模块且所述放料口上方设有显示器;所述箱体上还设有多个扇门用于检修每部的模块。
21.本实用新型的有益效果:
22.(1)产品位置测量精准,通过相机拍照模组、距离测量模组分别对水平方向和竖直方向的偏差以及对锁螺丝模组的控制,同时调整产品角度和锁螺丝模组的精确定位控制,提高了加工的成功率和准确率;
23.(2)两套锁螺丝模组的同时运行有效提供组装效率;
24.(3)自动对位平台精度高,调整速度快;
25.(4)产品切换灵活,可以自适应不同大小的产品。
附图说明
26.图1为本实用新型的箱体内各模组的结构示意图。
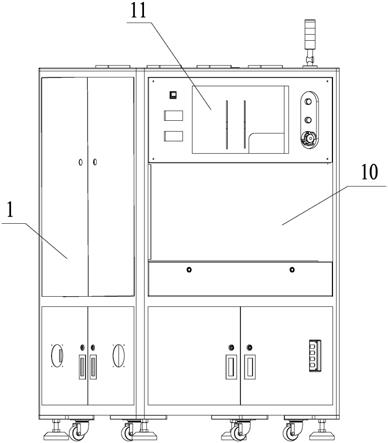
27.图2为本实用新型的箱体结构示意图。
28.图3为本实用新型的锁螺丝模组结构示意图。
29.图4为本实用新型的相机拍摄模组结构示意图。
30.图5为本实用新型的产品固定模组结构示意图。
31.图6为本实用新型的扫码模组结构示意图。
32.图7为本实用新型的距离测量模组结构示意图。
33.图8为本实用新型的自动对位结构示意图。
具体实施方式
34.下面结合附图对本实用新型作进一步的描述。
35.参照附图。一种自动对位锁螺丝机,包括箱体1、设置在箱体1内的底座2、产品固定模组3、锁螺丝模组4、距离测量模组5、相机拍摄模组6、自动对位模组7以及扫码模组8。其中:
36.产品固定模组3设置在底座2上,用于固定需要连接螺丝的上部产品(比如笔记本电脑的设置屏幕的盖),包括由气缸驱动的左右方向上的夹持机构31、与左右移动机构连接
的后部夹持部件32,以及由气缸驱动而能前后运动的前部夹持部件33,后部夹持部件32和前部夹持部件33配合而形成前后方向上的夹持机构,防止在调整和锁螺丝的时候上部产品晃动。
37.锁螺丝模组4,固定在底座2上,位于产品固定模组3的上方;锁螺丝模组4设置两组自动螺丝枪4,用于分别对上部产品和下部产品(比如笔记本电脑的设置键盘的主体)的相对两侧锁螺丝,各自动螺丝枪40分别配置相机。自动螺丝枪40连接在xyz轴移动机构上,xyz轴移动机构包括y轴移动机构42、x轴移动机构41和z轴移动机构43,y轴移动机构42安装在x轴移动机构41上,z轴移动机构43安装在y轴移动机构42上,自动螺丝枪40安装在z轴移动机构上,各轴移动机构均设置其驱动电机,相机44安装在y轴移动机构42上,根据相机44拍摄产品上的螺丝位置,引导锁螺丝枪走到对应螺丝的正上方,然后向下进行锁附。
38.距离测量模组5,安装在底座2上,位于产品固定模组3附近用于获取需要连接螺丝的上部产品和下部产品的竖直方向和角度偏差,包括多个激光测距器50。特别的,激光测距器50为四组,分别对应于产品固定模块的四角,同时对应地测量产品的四角。激光测距器50可安装在位移机构上,而能够调节四个激光测距器50的在xy轴的相对位置,针对不同的产品可以切换测量的位置适配不同产品。
39.相机拍摄模组6,位于产品固定模组3的附近且用于获取需要连接螺丝的上部产品和下部产品的水平方向的偏差。特别的,相机拍摄模组6设置两个相机60,分别位于产品固定模组3的相对两侧,同时获取产品的相对两侧偏差信息。
40.自动对位模组7,位于产品固定模组3下方,用于固定需要连接螺丝的下部产品,并根据距离测量模组5和相机拍摄模组6获取的偏差信息对载物平台自动对位矫正位置。所述自动对位模组7设置所述载物平台71,用于放置下部产品,所述载物平台71安装在位移机构72上,所述位移机构72设置x轴移动机构、y轴移动机构和z轴移动机构,x轴移动机构、y轴移动机构和z轴移动机构分别设置驱动机构而能根据距离测量模组5和相机拍摄模组6获取的偏差信息对载物平台71自动对位矫正位置,并且实时调整,直至下部产品和上部产品之间的相对位置达到要求位置。所述自动对位模组7还设置下部产品的定位结构,包括吸盘73,左右夹持机构74和前部限位机构75,所述前部限位机构75与位移机构连接而能够前后移动,推动下部产品到位。
41.扫码模组8位于产品固定模组3上方。扫码模组8设置扫码枪,自动获取产品上二维码或者条形码,并将产品和调整数据绑定,用于后期的追踪。
42.箱体1正面开设有放料口10,放料口10对应产品固定模组3且放料口10上方设有显示器11;箱体1上还设有多个扇门用于检修每部的模块。
43.本实施例的工作原理:首先,人工把下部产品放入自动对位模组7。产品固定模组3夹紧上部产品后扫码模组8获取产品的二维码。然后,相机和激光测距仪射获取产品xy方向及角度偏差,根据偏差数值自动对位模组7运行,将下部产品调整至要求的精度。最后锁螺丝模组4自动锁附螺丝,组装完成,人工拿出产品即可。
44.应当指出,上述描述了本实用新型的实施例。然而,本领域技术的技术人员应该理解,本实用新型不受上述实施例的限制,上述实施例中描述的只是说明本实用新型的原理,在不脱离本实用新型范围的前提下本实用新型还会有多种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1