一种用于焊丝剪切及焊丝嘴清洁装置的制作方法
1.本实用新型属于焊机工具上的焊丝剪切装置,具体涉及一种用于焊丝剪切及焊丝嘴清洁装置。
背景技术:
2.目前,多数的金属焊接都是通过焊接机器人来完成,尤其是在汽车焊接上,既能节省人力成本,也能更好的控制焊接精度。对于机器人焊接工具,尤其是激光焊接上,一般均设有送丝模块,通过送丝模块将焊丝输送至待焊位置,然后通过激光实现钎焊、送丝熔焊及激光复合焊接,但是焊丝在焊接的过程中难免会查形成焊渣或结球,对于该现象则需要剪切和清理,否则会影响到后续的焊接质量。
3.现有的焊接用的用于焊丝剪切及焊丝嘴清洁装置包括采用刀片对焊丝的剪切,然后通过毛刷进行清理导电嘴上的污渍等,但是使用效果和清洁效果不是很好,例如存在刀片的剪切控制精度不够,缺少辅助检测传感器,在剪切的工作过程中出现剪切后焊丝的长度不是该工艺所需要的焊丝长度或直接出现未剪断的现象,那么需要人工监督管理,另外,对于激光钎焊送丝熔焊及激光复合焊接中,对于焊丝长度的要求是不同的,需要及时的调整用于焊丝剪切及焊丝嘴清洁装置的焊丝剪切长度,现有技术对此一般可通过控制机器人的程序指令,调整送丝枪或送丝模块旋转至该切刀的位置控制,更加了机器人焊接工具的控制复杂性,对于用于焊丝剪切及焊丝嘴清洁装置本身的控制调整则比较少,不够实用方便。
技术实现要素:
4.实用新型目的:为进一步的提高焊接用的剪切机实用性和剪丝效果,包括提高剪丝后的导电嘴清洁,本实用新型提供一种用于焊丝剪切及焊丝嘴清洁装置。
5.技术方案:一种用于焊丝剪切及焊丝嘴清洁装置,包括气缸、刀片、控制器、传感器和机架,所述用于焊丝剪切及焊丝嘴清洁装置设有剪切机构,所述剪切机构中包括刀片和判断气缸活塞杆位置的气缸传感器,在刀片的下方设有废料盒,所述刀片包括第一刀片和第二刀片,第一刀片通过气缸连接块与固定在机架上的气缸的气缸活塞杆上控制剪切操作,与第一刀片配合剪切的是第二刀片,所述第二刀片通过刀片连接块设置于机架上,所述的气缸传感器嵌合设置在气缸表面,包括检测气缸活塞杆起始位置的第一气缸传感器和检测气缸活塞杆剪切位置第二气缸传感器,气缸设有电磁阀控制与气缸连接的气管,控制器包括根据传感器的反馈信号控制电磁阀完成刀片的剪切动作。
6.进一步的,所述用于焊丝剪切及焊丝嘴清洁装置通过调节第一刀片和第二刀片的位置高度实现焊丝不同长度的剪切,即在焊接机器人的送丝模块上保留适用于激光钎焊、激光送丝熔焊及激光复合焊的不同焊丝长度。
7.进一步的,所述的机架上通过传感器固定块设置有用于感知焊丝长度的接近传感器,且将感知到的焊丝长度数据传输至控制器,用于检测剪丝是否合格;在用于焊丝剪切及
焊丝嘴清洁装置上还设有清洁机构,所述的清洁机构包括用于清理导电嘴上的污渍的毛刷组件,所述毛刷组件固定在废料盒的上方,清理后的焊丝残渣也会掉落入到下方的废料盒中。
8.为了用于焊丝剪切及焊丝嘴清洁装置的外部整洁,也有助于保护组成部件,所述用于焊丝剪切及焊丝嘴清洁装置设有外壳体,且在刀片连接块、毛刷组件、传感器固定块与机架之间的缝隙处设有挡板,通过挡板防止焊丝落入到外壳体的内部。
9.更进一步的,所述的剪切机构、清洁机构及接近传感器共线设置,焊接机器人手臂移过来的焊丝沿直线行进,则完成剪丝、清洁和检测过程,也方便控制。
10.有益效果:与现有技术相比,本实用新型所述的用于焊丝剪切及焊丝嘴清洁装置包括用于剪丝的剪切机构,用于导电嘴清理的清洁机构,还包括用于检测剪切工作完成质量的接近传感器,自动化程度更高,通过设置的传感器,以及在控制器对于气缸等控制下,进一步的保证了焊丝剪切操作效果。
附图说明
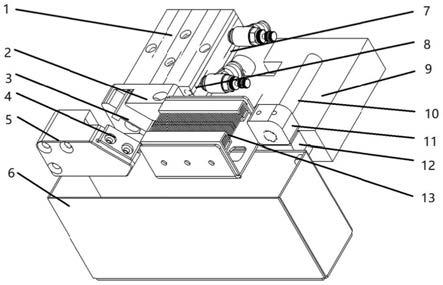
11.图1是本实用新型所述的用于焊丝剪切及焊丝嘴清洁装置内部机构示意图;
12.图2是本实用新型所述用于焊丝剪切及焊丝嘴清洁装置采用外壳体封装后的结构示意图。
13.图中:1、气缸,2、气缸连接块,3、第一刀片,4、第二刀片,5、刀片连接块,6、废料盒,7、第一气缸传感器,8、第二气缸传感器,9、电磁阀,10、接近传感器,11、传感器固定块,12、挡板,13、毛刷组件,14、外壳体。
具体实施方式
14.为了详细的说明本实用新型公开的技术方案,下面结合说明书附图及具体实施例做进一步的阐述。
15.如图1所示,本实用新型所提供的是一种用于焊丝剪切及焊丝嘴清洁装置,用于辅助机器人焊接,熟实现对于焊丝的剪丝操作。该用于焊丝剪切及焊丝嘴清洁装置包括剪切机构用于焊丝的剪切,设有清洁机构用于导电嘴上焊渣或污渍的清洁,还设有接近传感器实现对于剪丝操作效果的检测。具体的说,该用于焊丝剪切及焊丝嘴清洁装置按照实际的产品设计规格设置机架,在机架上固定有气缸1,气缸连接有气管,且设有电磁阀9进行控制,气缸1上固有气缸活塞杆,在气缸活塞杆的端部,设置有气缸连接块2,气缸连接块2上用于固定第一刀片3,第一刀片3在气缸连接块2上可以进行安装位置的调节,包括设置调节螺栓等进行配合实现位置的调节,考虑到激光钎焊、激光送丝熔焊及激光复合焊需要不同的焊丝长度来实现,通过气缸连接块2进行安装第一刀片3,也方便后续的更换等操作,更加的灵活。在剪切装置中的刀片包括第一刀片3和第二刀片4,在该实施例中,第一刀片3是在气缸活塞杆运动下实现剪丝,第二刀片4为固定不动的,与第一刀片3刀锋相对。第二刀片4是通过到刀片连接块5固定在机架上的,刀片连接块5的设置也是方便第二刀片4的高度、位置调节,以及后续的更换,在第一刀片3和第二刀片4的刀口下方,通过机架固定设有废料盒6,用于收集剪切后的焊丝,废料盒6包括设置为葫芦口的开口形状,且可方便拿取。
16.对于气缸1的控制上,设有第一气缸传感器7和第二气缸传感器8,第一气缸传感器
7和第二气缸传感器8均通过嵌合在气缸表面,分别对应检测气缸活塞杆不同的位置,也可以进行气缸活塞杆起始位置的检测和剪切位置的检测,用于判断剪切机构是否完成了剪丝动作,并且判断是否剪切到位,第一气缸传感器7和第二气缸传感器8将检测信号反馈控制器,所述的控制器包括采用plc控制器等实现,也包括连接外部控制器进行分析处理,发送操作指令,控制器通过控制电磁阀9进一步的实现剪丝的控制。
17.完成剪丝动作后,焊接机器人的手臂将送丝部件水平移动至同侧的清洁机构,清洁机构主要包括毛刷组件13,通过安装框安装固定在机架上,在焊接机器人控制机械手臂上导电嘴划过毛刷组件13时候完成清洁,被毛刷组件13清理下来的焊渣污渍自动脱落入下方的废料盒6中。
18.在剪切机构和清洁机构同侧,同高度上设有接近传感器10,接近传感器10是通过传感器固定块11设置在机架上,同样便于调节和后续的拆装维护。接近传感器11通过感知焊丝的长度,来检测剪丝是否合格,检测是否达到设定的焊丝保留度,据此避免焊丝过长,气体保护效果差,焊缝被空气侵入形成气孔缺陷几率增大。焊丝电阻热较大,焊接过程不稳定,飞溅较大,若焊丝伸出过短,导电嘴受热散热性差,导电嘴使用寿命显著降低。飞溅物也容易烧坏导电嘴喷嘴。焊缝熔池也不易观察,也同样无法保证焊接质量。
19.更加优选的,所述的用于焊丝剪切及焊丝嘴清洁装置外部设有外壳体14,如图2所示,设置外壳体14进行封装既能实现美观,也能有效保护外壳体14内部的组件不受外界损伤,破坏等。为避免剪丝和清洁过程中焊渣等进入到外壳体14的内部,刀片连接块5、毛刷组件13、传感器固定块11与机架之间的缝隙处设有挡板12,通过挡板12防止焊丝落入到外壳体的内部,也包括在用于焊丝剪切及焊丝嘴清洁装置构的刀片下方设置引导槽将废料引入到废料盒6,也包括在毛刷组件13的安装框下部设有漏孔用于收集焊渣污渍等。
20.结合现有技术,包括对气缸、控制器的相关连接电路及控制技术可知,本实用新型所述的用于焊丝剪切及焊丝嘴清洁装置在实际操作过程中,通过电磁阀控制气缸的运动状态带动气缸连接块和刀片来实现剪丝操作,在剪丝完成后,在导电嘴继续前进的过程中,通过毛刷清理污渍;最后通过传感器来检测剪丝的效果,包括对于激光钎焊、激光送丝熔焊及激光复合焊所需不同焊丝长度的适应性调整和剪切,本实用新型所述的用于焊丝剪切及焊丝嘴清洁装置由外部plc控制电磁阀和接近传感器来实现自动化控制,且在剪丝过程中具有较强的灵活性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1