一种耐磨损的机器人柔性焊接工作站的制作方法
1.本技术涉及焊接工作站领域,尤其涉及一种耐磨损的机器人柔性焊接工作站。
背景技术:
2.随着社会的发展,大多工厂中使用机器人进行焊接操作,而焊接机器人在运行时转动处易产生磨损,增加设备的故障率,降低了设备的工作效率,缩短高了设备的使用寿命,对此需进行改进。
技术实现要素:
3.本技术的目的是为了解决现有技术中存在焊接机器人在运行时转动处易产生磨损,增加设备故障率的缺点,而提出的一种耐磨损的机器人柔性焊接工作站。
4.为了实现上述目的,本技术采用了如下技术方案:一种耐磨损的机器人柔性焊接工作站,包括底座和润滑装置,所述底座的表面设置有操作台,所述底座靠近操作台的一侧设置有机械臂,所述润滑装置设置在机械臂的一侧,所述润滑装置包括安装台,所述安装台与机械臂固定连接,所述安装台的一侧开设有槽一,所述安装台一侧的槽一的内壁滑动连接有油箱,所述油箱的表面开设有注油孔,所述油箱的上表面转动连接有圆形板,通过设置润滑装置,有效对机械臂的转动处进行润滑,减少了机械臂的磨损,提高了设备的易用性,便于设备进行使用。
5.作为优选,所述油箱的一侧开设有出料口,所述油箱的一侧开设有槽二,所述油箱一侧的槽二的内壁滑动连接有挡板,所述油箱的一侧固定连接有固定杆,通过设置油箱,使用时油箱将润滑油储存,减少了润滑油的浪费,便于进行多次使用,提高了设备的稳定性,减少了润滑油的流失。
6.作为优选,所述固定杆远离油箱的一侧贯穿挡板并与挡板滑动连接,所述安装台的表面开设有槽三,所述安装台表面的槽三的内壁滑动连接有定位杆,所述油箱靠近定位杆的一侧开设有槽四,所述定位杆与油箱表面的槽四卡合连接,通过设置定位杆,使用时滑动定位杆插入油箱中,便于将油箱定位,减少了设备的滑动,提高了设备的稳定性。
7.作为优选,所述固定杆的表面套设有限位弹簧,所述限位弹簧的两端分别与挡板和油箱固定连接,通过设置限位弹簧,使用时,限位弹簧辅助挡板对出料口进行闭合,提高了设备的易用性,减少了设备的操作难度。
8.作为优选,所述操作台的一侧设置有收集装置,所述收集装置包括毛刷,所述毛刷与操作台滑动连接,所述操作台的表面开设有槽五,所述操作台表面的槽五的内壁滑动连接有控制杆,所述操作台的下表面固定连接有方形块,通过设置收集装置,有效将机械臂焊接后产生的杂物和碎屑收集,减少了使用者的清理负担,提高了设备的易用性,便于设备进行使用。
9.作为优选,所述方形块的表面开设有孔一,所述方形块表面的孔一的内壁卡合连接有收集盒,所述收集盒的一侧开设有槽六,所述收集盒一侧的槽六的内壁滑动连接有拉
杆,所述方形块靠近拉杆的一侧开设有孔二,所述拉杆与方形块一侧的孔二卡合连接,通过设置收集盒,将焊接后掉落的碎屑和杂物收集,减少了使用者的清理负担,便于进行使用。
10.作为优选,所述拉杆的表面套设有固定弹簧,所述固定弹簧的两端分别与拉杆和收集盒固定连接,通过设置固定弹簧,使用时固定弹簧辅助拉杆对收集盒进行定位,提高了设备的稳定性,便于对收集盒进行拿取,减少了设备的操作步骤。
11.与现有技术相比,本技术的优点和积极效果在于:
12.1、本技术中,通过设置润滑装置,使用时,转动圆形板打开注油孔并加入润滑油,然后转动圆形板关闭注油孔,此时拉动定位杆脱离油箱,并滑动油箱靠近机械臂的转动处,然后拉动挡板,挡板滑动并打开出料口,润滑油通过出料口流出,并滴落在转动处,对机械臂进行润滑,然后松开挡板,限位弹簧失去束缚产生弹力拉动挡板将出料口关闭完成使用,此时滑动油箱远离机械臂,然后按压定位杆插入油箱中,通过设置润滑装置,有效对机械臂进行润滑,减少了机械臂的磨损,提高了设备的稳定性,降低设备的故障率,增加了设备的工作效率,进而提高了设备的使用寿命。
13.2、本技术中,通过设置收集装置,使用时,拉动控制杆脱离毛刷,并滑动毛刷,毛刷将操作台表面的碎屑和焊接后产生的杂物刮落并掉入收集盒中进行收集,推动拉杆,即可将收集盒取下,将收集盒中的杂物清理完成后,插入方形块中,并松开拉杆,固定弹簧产生弹力推动拉杆插入方形块中完成定位,通过设置收集装置,有效将操作台使用后产生的碎屑杂物收集,减少了使用者的清理负担,便于使用者将杂物处理,提高了设备的易用性,便于使用者进行使用。
附图说明
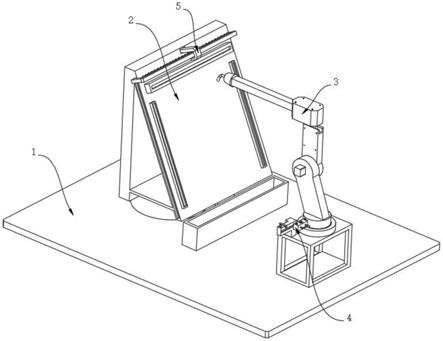
14.图1为本技术提出一种耐磨损的机器人柔性焊接工作站的立体结构示意图;
15.图2为本技术提出一种耐磨损的机器人柔性焊接工作站的润滑装置结构示意图;
16.图3为本技术提出一种耐磨损的机器人柔性焊接工作站的图2的a处放大结构示意图;
17.图4为本技术提出一种耐磨损的机器人柔性焊接工作站的收集装置结构示意图;
18.图5为本技术提出一种耐磨损的机器人柔性焊接工作站的收集装置部分结构示意图。
19.图例说明:1、底座;2、操作台;3、机械臂;4、润滑装置;41、安装台;42、定位杆;43、油箱;44、圆形板;45、固定杆;46、挡板;47、限位弹簧;5、收集装置;51、收集盒;52、毛刷;53、控制杆;54、方形块;55、拉杆;56、固定弹簧。
具体实施方式
20.请参阅图1-5,本技术提供一种技术方案:一种耐磨损的机器人柔性焊接工作站,包括底座1和润滑装置4,底座1的表面设置有操作台2,底座1靠近操作台2的一侧设置有机械臂3,润滑装置4设置在机械臂3的一侧,操作台2的表面设置有收集装置5。
21.下面具体说一下其润滑装置4和收集装置5的具体设置和作用。
22.本实施方案中:润滑装置4包括安装台41,安装台41与机械臂3固定连接,安装台41的一侧开设有槽一,安装台41一侧的槽一的内壁滑动连接有油箱43,油箱43的表面开设有
注油孔,油箱43的上表面转动连接有圆形板44,通过设置润滑装置4,有效对机械臂3的转动处进行润滑,减少了机械臂3的磨损,提高了设备的易用性,便于设备进行使用。
23.具体的,油箱43的一侧开设有出料口,油箱43的一侧开设有槽二,油箱43一侧的槽二的内壁滑动连接有挡板46,油箱43的一侧固定连接有固定杆45,通过设置油箱43,使用时油箱43将润滑油储存,减少了润滑油的浪费,便于进行多次使用,提高了设备的稳定性,减少了润滑油的流失。
24.具体的,固定杆45远离油箱43的一侧贯穿挡板46并与挡板46滑动连接,安装台41的表面开设有槽三,安装台41表面的槽三的内壁滑动连接有定位杆42,油箱43靠近定位杆42的一侧开设有槽四,定位杆42与油箱43表面的槽四卡合连接。
25.在本实施例中:通过设置定位杆42,使用时滑动定位杆42插入油箱43中,便于将油箱43定位,减少了设备的滑动,提高了设备的稳定性。
26.具体的,固定杆45的表面套设有限位弹簧47,限位弹簧47的两端分别与挡板46和油箱43固定连接,通过设置限位弹簧47,使用时,限位弹簧47辅助挡板46对出料口进行闭合,提高了设备的易用性,减少了设备的操作难度。
27.在本实施例中:操作台2的一侧设置有收集装置5,收集装置5包括毛刷52,毛刷52与操作台2滑动连接,操作台2的表面开设有槽五,操作台2表面的槽五的内壁滑动连接有控制杆53,操作台2的下表面固定连接有方形块54,通过设置收集装置5,有效将机械臂3焊接后产生的杂物和碎屑收集,减少了使用者的清理负担,提高了设备的易用性,便于设备进行使用。
28.具体的,方形块54的表面开设有孔一,方形块54表面的孔一的内壁卡合连接有收集盒51,收集盒51的一侧开设有槽六,收集盒51一侧的槽六的内壁滑动连接有拉杆55,方形块54靠近拉杆55的一侧开设有孔二,拉杆55与方形块54一侧的孔二卡合连接,通过设置收集盒51,将焊接后掉落的碎屑和杂物收集,减少了使用者的清理负担,便于进行使用。
29.具体的,拉杆55的表面套设有固定弹簧56,固定弹簧56的两端分别与拉杆55和收集盒51固定连接。
30.在本实施例中:通过设置固定弹簧56,使用时固定弹簧56辅助拉杆55对收集盒51进行定位,提高了设备的稳定性,便于对收集盒51进行拿取,减少了设备的操作步骤。
31.工作原理:通过设置润滑装置4,使用时,转动圆形板44打开注油孔并加入润滑油,然后转动圆形板44关闭注油孔,此时拉动定位杆42脱离油箱43,并滑动油箱43靠近机械臂3的转动处,然后拉动挡板46,挡板46滑动并打开出料口,润滑油通过出料口流出,并滴落在转动处,对机械臂3进行润滑,然后松开挡板46,限位弹簧47失去束缚产生弹力拉动挡板46将出料口关闭完成使用,此时滑动油箱43远离机械臂3,然后按压定位杆42插入油箱43中,通过设置润滑装置4,有效对机械臂3进行润滑,减少了机械臂3的磨损,提高了设备的稳定性,降低设备的故障率,增加了设备的工作效率,进而提高了设备的使用寿命。
32.本技术中,通过设置收集装置5,使用时,拉动控制杆53脱离毛刷52,并滑动毛刷52,毛刷52将操作台2表面的碎屑和焊接后产生的杂物刮落并掉入收集盒51中进行收集,推动拉杆55,即可将收集盒51取下,将收集盒51中的杂物清理完成后,插入方形块54中,并松开拉杆55,固定弹簧56产生弹力推动拉杆55插入方形块54中完成定位,通过设置收集装置5,有效将操作台2使用后产生的碎屑杂物收集,减少了使用者的清理负担,便于使用者将杂
物处理,提高了设备的易用性,便于使用者进行使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1