一种绞龙自动焊接装置的制作方法
1.本实用新型涉及一种绞龙自动焊接装置,属于机械加工设备技术领域。
背景技术:
2.绞龙是螺旋输送机的俗称,用于颗粒和粉状物料的水平输送、倾斜输送、垂直输送等形式,可广泛用于化工、建材、机械、煤炭、冶金、轻工、粮食、医药、交通、水电等部门,用来输送各种各样的粉状和小块物料。如:煤粉、水泥、砂、塑料颗粒、谷类等。
3.针对绞龙螺旋叶片的焊接生产工艺主要采用人工手工焊接或者机器人焊接,人工手焊的效率低并且焊接质量与焊接人员的技术水平有关系,高水平的焊接人员用工成本越来越高,水平不足的焊接人员焊接质量不稳定,容易出现质量问题,焊接机器人在焊接绞龙时,需要根据绞龙的型号变化更换程序繁琐,并且设备采购费用高,一般只适合单一的产品焊接。
技术实现要素:
4.本实用新型要解决的技术问题是提供一种焊接效率高,节约人工成本和劳动强度,降低作业风险,提高自动化水平的绞龙自动焊接装置。
5.为解决上述技术问题本实用新型所采取的技术方案是:
6.一种绞龙自动焊接装置,其包括支架、设置在所述支架一侧上的转台以及设置在所述支架另一侧的焊接装置;
7.所述焊接装置包括导轨滑块组、铰接设置在所述导轨滑块组上的焊接机头支架以及设置在所述焊接机头支架活动端的焊接机头。
8.进一步的,所述焊接机头包括在焊接机头机架活动端的焊枪夹座以及夹持固定设置在焊枪夹座内部的焊枪。
9.进一步的,所述焊枪夹座上设置与绞龙螺旋叶片抵触的第一导向轴承。
10.进一步的,所述焊枪夹座上设置与焊接轴抵触的第二导向轴承。
11.进一步的,所述焊枪夹座包括固定设置在焊接机头机架活动端的夹板支座以及设置在所述夹板支座两侧的夹板,所述第一导向轴承设置在夹板支座的端面上。
12.进一步的,所述夹板支座的侧面上设置轴承安装座,所述第二导向轴承安装在轴承安装座上。
13.进一步的,所述焊枪上穿装设置有夹块,所述夹块设置在上下夹板之间。
14.进一步的,所述导轨滑块组上设置铰接支座,所述焊接机头支架铰接设置在铰接支座上。
15.进一步的,所述焊接机头支架下侧铰接设置气缸,所述气缸固定设置在铰接支座上。
16.进一步的,所述机架上设置型材,所述型材上设置与型材滑动配合设置的导轨滑块组。
17.采用上述技术方案所产生的有益效果在于:
18.本实用新型通过将待焊绞龙按位置装夹到转台上,通过控制气缸收缩调整焊接机头的位置,然后手动调整把第一导向轴承抵触绞龙叶片,把第二导向轴承抵触接触焊接轴,启动焊机开始焊接,焊接机头无动力源输入,利用绞龙的转动被动的拖动焊接机头沿着导轨滑块组上导向运动,其解决了人工焊接用工成本日益增长,焊接质量参差不齐,工人劳动强度高,并且存在安全防护不到位产生作业安全风险的问题,大大提高了焊接作业的自动化水平,其相对于现有的焊接机器人成本大大降低,并且焊接绞龙型号发生变化时非常便于调整。
附图说明
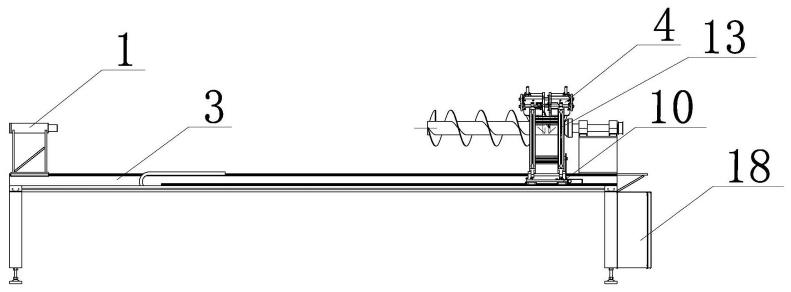
19.图1为本实用新型主视结构示意图;
20.图2为本实用新型右视结构示意图;
21.图3为本实用新型焊接机头立体结构示意图;
22.图4为本实用新型焊接机头部位俯视结构示意图;
23.其中, 1、转台,2、夹板支座,3、支架,4、焊接机头,5、夹板,6、轴承安装座,7、夹块,8、气缸,9、铰接支座,10、导轨滑块组,11、型材,12、第二导向轴承,13、焊接机头机架,14、气缸铰接支座,15、焊枪,16、焊枪夹座,17、第一导向轴承,18、电气箱。
具体实施方式
24.下面结合附图对本实用新型做进一步说明。
25.如附图1-4所示,本实施例提供一种绞龙自动焊接装置,其包括支架3、设置在所述支架3一侧上的转台1以及设置在所述支架3另一侧的焊接装置;所述焊接装置包括导轨滑块组10、铰接设置在所述导轨滑块组10上的焊接机头支架13以及设置在所述焊接机头支架13活动端的焊接机头4,所述机架3上设置型材11,所述型材11上设置与型材11滑动配合设置的导轨滑块组10,所述导轨滑块组10上设置铰接支座9,所述焊接机头支架13铰接设置在铰接支座9上,所述焊接机头支架13下侧设置气缸铰接支座14,气缸铰接支座14铰接设置气缸8,所述气缸8固定设置在铰接支座9上,所述焊接机头4包括在焊接机头机架13活动端的焊枪夹座16以及夹持固定设置在焊枪夹座16内部的焊枪15,所述焊枪夹座16包括固定设置在焊接机头机架13活动端的夹板支座2以及设置在所述夹板支座2两侧的夹板5,所述第一导向轴承17设置在夹板支座2的端面上,第一导向轴承17与绞龙螺旋叶片抵触,所述夹板支座2的侧面上设置轴承安装座6,所述第二导向轴承12安装在轴承安装座6上,所述焊枪夹座16上设置与焊接轴抵触的第二导向轴承12,所述轴承安装座6上设置通孔,焊枪15穿过通孔并将焊枪口对住绞龙螺旋叶片和焊接轴的接缝部位,本实用新型通过将待焊绞龙按位置装夹到转台1上,通过控制气缸8收缩调整焊接机头的位置,然后手动调整把第一导向轴承17抵触绞龙叶片,把第二导向轴承12抵触接触焊接轴,启动焊机开始焊接,焊接机头无动力源输入,利用绞龙的转动被动的拖动焊接机头4沿着导轨滑块组10上导向运动,其解决了人工焊接用工成本日益增长,焊接质量参差不齐,工人劳动强度高,并且存在安全防护不到位产生作业安全风险的问题,大大提高了焊接作业的自动化水平,其相对于现有的焊接机器人成本大大降低,
26.所述焊枪15上穿装设置有夹块7,所述夹块7设置在上下夹板5之间,上下夹板通过螺栓进行紧固,夹板5对夹块7形成上下稳固夹持,进而实现对焊枪15的稳固夹持。
27.转台1可以通过采用变频电机驱动的方式,在机架3一侧设置电气箱19用于控制驱动电机,通过操作面板设定焊接长度、焊接方式(连续焊接或者是断续焊接)以及控制气缸8收缩调节焊接机头的位置,大大提高了其自动化水平。
28.具体使用工作过程如下:
29.转台1安装在机头支架3上,用于待焊接绞龙的夹装和旋转,待焊绞龙按位置装夹到指定位置,焊接机头4通过导轨滑块组10安装在安装铝型材11上面,焊接机头机架13设置在铰接支座9上,铰接支座9上设置气缸8,通过气缸8使得焊接机头4向下沿着限位板到达焊接位置,限位板设置在铰接支座9上,通过调节气缸8进而调节焊枪夹座16的位置,使得第一导向轴承17抵触绞龙叶片,第二导向轴承12抵触接触焊接轴,拧紧夹板,此为初始位置,在电控箱18的触摸屏上设置焊接长度,启动焊机,焊接机头无需动力源输入,利用绞龙的转动被动的拖动焊枪15沿着导轨滑块组10导向运动,大大提高了自动化水平,在绞龙型号发生改变时,只需要调整气缸8的伸缩长度调整焊枪夹座16的位置即可实现调整,调节方便。
30.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1