可选上料组装装置的制作方法
1.本实用新型涉及机械设备技术领域,具体地,涉及一种可选上料组装装置。
背景技术:
2.科技的进步对日常的生活以及工业的发展产生了巨大的影响,不仅提高了生活的水平和品质,同时,对于工业的生产制造也带了极大的便利。例如:由传统的人工手动进行产品的加工,发展到现代的设备取代人工生产,大大提升生产力。
3.目前,针对不同的产品大多都有专用的装置进行生产制造,实际中,很多的产品都是由不同的部件组成,例如电子产品的镜头,其由镜筒、镜片、soma片以及隔圈等部件构成,不同的部件独立加工完成后,通常都是人工手动进行取料和运料,然后通过一个组装机将不同的部件组装成一体。该工作方式所造成的成本高,而且效率不高,降低企业的产能。
技术实现要素:
4.针对现有技术的不足,本实用新型提供一种可选上料组装装置。
5.本实用新型公开的一种可选上料组装装置,包括:镜筒运料组装机构,其包括接料组件、组装组件及运料组件,接料组件用于承接镜筒,运料组件将镜筒由接料组件搬运至组装组件;
6.送料机构,其包括x轴送料组件及z轴送料组件,x轴送料组件驱动z轴送料组件运动,z轴送料组件用于夹取镜片或soma片,并搬运至镜筒进行组装;以及
7.可选上料机构;其用于上料镜片或soma片。
8.根据本实用新型的一实施方式,镜筒运料组装机构还包括缓存组件,缓存组件设置于组装组件远离接料组件的一侧。
9.根据本实用新型的一实施方式,组装组件包括组装承载件及组装调整件,组装承载件位于镜筒输送路径的一侧,组装调整件连接组装承载件。
10.根据本实用新型的一实施方式,运料组件包括y轴运料件、z轴运料件、运料支撑件及运料夹取件,y轴运料件沿镜筒输送路径运动,z轴运料件设置于y轴运料件,运料支撑件设置于z轴运料件输出端,运料夹取件设置于运料支撑件。
11.根据本实用新型的一实施方式,z轴送料组件包括z轴送料件及吸料件,z轴送料件设置于x轴送料组件,吸料件设置于z轴送料件。
12.根据本实用新型的一实施方式,z轴送料组件还包括吸料调整件,吸料调整件设置于吸料件,吸料调整件调整吸料件输出端的位置。
13.根据本实用新型的一实施方式,可选上料机构包括分别对镜片和soma片进行上料的镜片上料部及soma片上料部。
14.根据本实用新型的一实施方式,镜片上料部包括镜片上料组件、x轴拉料组件以及y轴上料组件,镜片上料组件设置于镜筒输送路径的一侧,x轴拉料组件与x轴送料组件平行设置,y轴上料组件与镜筒输送路径平行设置,x轴拉料组件将镜片上料组件的镜片抽出至y
轴上料组件,y轴上料组件将镜片推送至z轴送料组件。
15.根据本实用新型的一实施方式,还包括检测机构,检测机构对组装组件上的镜筒进行检测,检测机构还对镜片或soma片进行检测。
16.根据本实用新型的一实施方式,检测机构包括第一检测组件及第二检测组件,第一检测组件从镜筒的上部进行检测,第二检测组件从镜片或soma片的下部进行检测。
17.本实用新型的有益效果在于,通过镜筒运料组装机构、送料机构及可选上料机构的配合使用,镜筒上料至接料组件,运料组件将镜筒从接料组件搬运到组装组件,同时,z轴送料组件取出可选上料机构上的镜片或soma片,在x轴送料组件的带动下,将镜片或soma片搬运到组装组件,实现镜筒与镜片、soma片的组装。实现上料和组装的全自动化,减少人工上料和搬运的环节,大大提升了工作效率,进而提高产能,而且还降低成本。
附图说明
18.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
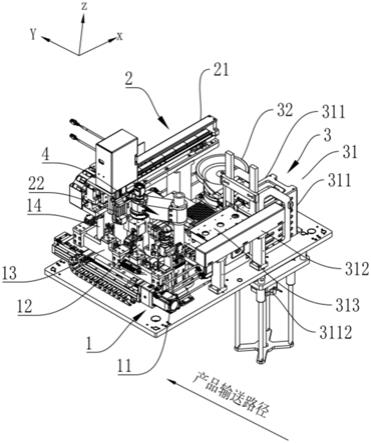
19.图1为实施例中可选上料组装装置的立体结构示意图;
20.图2为实施例中镜筒运料组装机构的立体结构示意图;
21.图3为实施例中送料机构的立体结构示意图;
22.图4为实施例中z轴送料组件的立体结构示意图;
23.图5为实施例中可选上料机构的立体结构示意图;
24.图6为实施例中检测机构的立体结构示意图;
25.图7为图6中a的放大示意图。
26.附图标记说明:
27.1-镜筒运料组装机构;11-接料组件;111-接料件;1111-接料槽;12-组装组件;121-组装承载件;122-组装调整件;13-运料组件;131-y轴运料件;132-z轴运料件;133-运料支撑件;134-运料夹取件;14-缓存组件;141-缓存件;
28.2-送料机构;21-x轴送料组件;211-x轴送料支架;212-x轴送料件;22-z轴送料组件;221-z轴送料件;222-吸料件;223-吸料调整件;224-测高感应件;
29.3-可选上料机构;31-镜片上料部;311-镜片上料组件;3111-镜片储存件;3112-镜片推料件;312-x轴拉料组件;3121-x轴拉料支撑件;3122-x轴拉料驱动件;3123-x轴拉料件;313-y轴上料组件;3131-y轴上料驱动件;3132-y轴上料件;32-soma片上料部;
30.4-检测机构;41-第一检测组件;411-第一检测支撑件;412-第一检测件;42-第二检测组件;421-第二检测支撑件;422-第二检测件;43-检测调整组件;431-检测调整驱动件;432-检测调整件;4321-调整槽。
具体实施方式
31.以下将以图式揭露本实用新型的多个实施方式,为明确说明起见,许多实务上的细节将在以下叙述中一并说明。然而,应了解到,这些实务上的细节不应用以限制本实用新型。也就是说,在本实用新型的部分实施方式中,这些实务上的细节是非必要的。此外,为简化图式起见,一些习知惯用的结构与组件在图式中将以简单的示意的方式绘示之。
32.另外,在本实用新型中如涉及“第一”、“第二”等的描述仅用于描述目的,并非特别指称次序或顺位的意思,亦非用以限定本实用新型,其仅仅是为了区别以相同技术用语描述的组件或操作而已,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
33.如图1所示,图1为实施例中可选上料组装装置的立体结构示意图。本技术的可选上料组装装置包括镜筒运料组装机构1、送料机构2及可选上料机构3,镜筒运料组装机构1沿镜筒输送路径设置,送料机构2与镜筒运料组装机构1成角度设置,可选上料机构3位于镜筒输送路径的一侧。镜筒运料组装机构1将镜筒进行接料,并且进行组装,送料机构2用于将可选上料机构3上的镜片搬运至镜筒运料组装机构1一起进行组装。
34.再一并参照图2所示,图2为实施例中镜筒运料组装机构1的立体结构示意图。镜筒运料组装机构1包括接料组件11、组装组件12及运料组件13,接料组件11与组装组件12沿镜筒的输送路径设置,运料组件13设置于镜筒的输送路径的一侧,且运料组件13与镜筒的输送路径平行,接料组件11与镜筒的输出线拼接,镜筒经输送后到达接料组件11,运料组件13将镜筒搬运至组装组件12。具体应用时,接料组件11包括接料件111,接料件111上设有接料槽1111,接料件111位于镜筒的输送方向上,接料槽1111与镜筒的结构相适配,镜筒落入到接料槽1111内。组装组件12包括组装承载件121及组装调整件122,组装承载件121与接料件111并排设置,组装调整件122连接组装承载件121,通过组装调整件122对组装承载件121上的镜筒进行位置调整。具体的,组装调整件122为现有的调整装置,可对组装承载件121进行不同位置的调整,使得镜筒在组装时的位置符合要求。运料组件13包括y轴运料件131、z轴运料件132、运料支撑件133及运料夹取件134,y轴运料件131与镜筒的输出路径相互平行,z轴运料件132设置于y轴运料件131,运料支撑件133连接z轴运料件132的输出端,运料夹取件134设置于运料支撑件133。具体应用时,y轴运料件131带动z轴运料件132、运料支撑件133及运料夹取件134在y轴方向上运动,z轴运料件132带动运料支撑件133在z轴上运动,运料支撑件133带动运料夹取件134一起在z轴上运动,最终运料夹取件134带动镜筒进行y轴方向移动以及在z轴方向上升降。本实施例中,z轴运料件132的数量为至少两个,至少两个z轴运料件132同时作用于运料支撑件133,提升运料支撑件133升降时的稳定性;运料夹取件134的数量为三个,三个运料夹取件134沿着运料支撑件133的开设方向间隔设置,通过不同的运料夹取件134分别将镜筒由接料件111上的接料槽1111搬运到组装承载件121,组装承载件121组装完成后再搬运到其他的加工位。实际应用时,运料夹取件134为现有的机械夹,该机械夹与镜筒的形状相适配。
35.进一步的,镜筒运料组装机构1还包括缓存组件14,缓存组件14设置在组装承载件121远离接料件111的一侧,同时,也是沿着镜筒输送路径的方向设置。缓存组件14包括缓存件141,运料夹取件134将组装承载件121上已经组装后的镜筒搬运至缓存件141,通过缓存件141的设置,相当于在组装调整件122与下一个加工位之间增设了一个缓存位置,例如:当组装承载件121上的镜筒已经组装完成后,下一个加工位还在加工时,运料夹取件134可将组装后的镜筒搬运至缓存件141,然后进行下一个镜筒的组装,无需等待下一个加工位加工
完成,如此,节约了工位之间的等待时间,进而提升了生产效率。
36.再一并参照图3-图4所示,图3为实施例中送料机构2的立体结构示意图;图4为实施例中z轴送料组件22的立体结构示意图。送料机构2包括x轴送料组件21及z轴送料组件22,x轴送料组件21与镜筒输送路径成角度设置,z轴送料组件22设置于x轴送料组件21的输出端,x轴送料组件21带动z轴送料组件22在x轴方向上运动,z轴送料组件22取出可选上料机构3上的镜片或soma片。具体应用时,x轴送料组件21包括x轴送料支架211及x轴送料件212,x轴送料支架211对x轴送料件212进行支撑,z轴送料组件22设置于x轴送料件212。具体的,x轴送料件212带动z轴送料组件22沿垂直于镜筒输送路径的方向运动,即x轴送料件212与镜筒输送路径的角度为90
°
。z轴送料组件22包括z轴送料件221及吸料件222,z轴送料件221设置于x轴送料件212的输出端,吸料件222设置于z轴送料件221。z轴送料件221带动吸料件222在z轴方向上运动,吸料件222对可选上料机构3上的镜片或soma片进行吸附取料。进一步的,z轴送料组件22还包括吸料调整件223,吸料调整件223连接吸料件222,通过吸料调整件223对吸料件222的位置进行调整,以使得吸料件222能准确的对镜片或soma片进行吸料。具体的,吸料件222为现有的吸嘴结构。吸料调整件223为现有的对吸料件222平面度进行调整的调节模块。更进一步的,z轴送料组件22还包括测高感应件224,测高感应件224设置于z轴送料件221,对z轴送料件221升降的高度信息进行采集和信号输送,实现对其的控制。
37.再一并参照图5所示,图5为实施例中可选上料机构3的立体结构示意图。可选上料机构3包括相邻设置的镜片上料部31及soma片上料部32。镜片上料部31包括镜片上料组件311、x轴拉料组件312及y轴上料组件313,镜片上料组件311位于镜筒输送路径的一侧,x轴拉料组件312与x轴送料件212平行设置,y轴上料组件313与镜筒输送路径平行设置。x轴拉料组件312将镜片上料组件311上的镜片沿x轴方向拉出,y轴上料组件313将镜片沿y轴方向推送至z轴送料件221的下部,吸料件222则吸取镜片。镜片上料组件311包括镜片储存件3111及镜片推料件3112,镜片储存件3111位于镜筒输送路径的一侧,且镜片储存件3111的出料端朝向镜筒输送路径,镜片推料件3112的输出端连接镜片储存件3111,当镜片储存件3111内的镜片被整盘拉出后,镜片推料件3112则将另一盘的镜片推向出料位置。具体的,镜片储存件3111为现有的产品储存结构。x轴拉料组件312包括x轴拉料支撑件3121、x轴拉料驱动件3122以及x轴拉料件3123,x轴拉料支撑件3121与x轴送料支架211平行设置,x轴拉料驱动件3122设置于x轴拉料支撑件3121,x轴拉料件3123连接x轴拉料驱动件3122的输出端。具体应用时,x轴拉料件3123与镜片的承载盘结构相适配,通过x轴拉料件3123将整盘的镜片拉出到y轴上料组件313。具体的,x轴拉料件3123为现有的夹爪结构,或者是带有钩子的结构。y轴上料组件313包括y轴上料驱动件3131及y轴上料件3132,y轴上料驱动件3131与镜筒输送路径平行设置,y轴上料件3132设置于y轴上料驱动件3131,且y轴上料件3132位于x轴拉料件3123运动的路径上。x轴拉料件3123将整盘镜片拉出到y轴上料件3132上,y轴上料驱动件3131带动y轴上料件3132朝靠近吸料件222的位置运动。
38.具体应用时,soma片上料部32为现有的振动盘结构,其将soma片进行输送和排序,便于吸料件222的吸取和搬运。
39.再一并参照图6所示,图6为实施例中检测机构4的立体结构示意图。检测机构4包括第一检测组件41及第二检测组件42,第一检测组件41对组装承载件121上的镜筒进行检
测,第二检测组件42对吸料件222上的镜片或soma片进行检测。第一检测组件41包括第一检测支撑件411及第一检测件412,第一检测支撑件411位于镜筒输送路径的一侧,第一检测件412设置于第一检测支撑件411,且第一检测件412位于组装承载件121的上部,通过第一检测件412对组装承载件121上的镜筒进行位置检测,并获取其位置信息。具体的,第一检测支撑件411可在一定范围内进行转动,便于对第一检测件412的位置进行调整,提升其工作的灵活性和准确性。第二检测组件42包括第二检测支撑件421以及第二检测件422,第二检测支撑件421位于镜筒输送路径的一侧,第二检测件422设置于第二检测支撑件421,具体应用时,第二检测件422位于吸料件222运输至组装承载件121的路径上,且其位于吸料件222的下部,对吸料件222上的镜片或soma片进行检测,并获取其位置信息。本实施例中,第一检测件412及第二检测件422均为ccd相机。
40.请继续参照图6所示,更进一步的,检测机构4还包括检测调整组件43,检测调整组件43设置在吸料件222运输镜片或soma片的路径上,并对镜片或soma片的位置进行校正。检测调整组件43包括检测调整驱动件431及两个检测调整件432,检测调整驱动件431设置于第二检测支撑件421,两个检测调整件432连接检测调整驱动件431的输出端,通过检测调整驱动件431带动两个检测调整件432相互靠近或相互远离运动,两个检测调整件432作用于镜片或soma片。
41.再一并参照图7所示,图7为图6中a的放大示意图。更进一步的,两个检测调整件432上均设有调整槽4321,两个检测调整件432上的调整槽4321拼接后与镜片或soma片相适配。具体应用时,吸料件222上的镜片或soma片先在调整槽4321上进行位置校正,然后再由第二检测件422进行检测。
42.需要说明的是,可选上料组装装置可以是只组装镜筒与镜片,也可以是只组装镜筒与soma片,当然,也可以是按步骤将镜片、soma片组装到镜筒,根据使用需求进行选择即可。
43.工作时,镜筒落入到接料件111上的接料槽1111,运料夹取件134将接料槽1111内的镜筒搬运至组装承载件121,此时,第一检测件412对镜筒进行位置检测,若是位置不正确,则通过组装调整件122进行位置调整;与此同时,x轴拉料件3123将镜片拉出到y轴上料件3132,再由y轴上料驱动件3131将y轴上料件3132推送至吸料件222下方,吸料件222在z轴送料件221的作用下将y轴上料件3132上的镜片吸起,然后移动至检测调整组件43,通过调整槽4321进行位置调整,而后,第二检测件422从下部对镜片进行位置检测,通过第一检测件412与第二检测件422分别对镜筒及镜片进行位置检测,并且根据该位置检测结果在组装时可通过组装调整件122进行适应的调整,使得镜筒与镜片的组装更准确,完后再移动至组装承载件121上的镜筒,组装后,y轴运料件131将镜筒由组装承载件121搬运至缓存件141上。
44.另一实施例中,不需要组装镜片,需要组装soma片,则吸料件222吸起soma片上料部32上soma片,其余步骤与上述的内容相同,在此不再赘述。
45.综上所述,通过镜筒运料组装机构、送料机构及可选上料机构的配合使用,镜筒上料至接料组件,运料组件将镜筒从接料组件搬运到组装组件,同时,z轴送料组件取出可选上料机构上的镜片或soma片,在x轴送料组件的带动下,将镜片或soma片搬运到组装组件,实现镜筒与镜片、soma片的组装。实现上料和组装的全自动化,减少人工上料和搬运的环
节,大大提升了工作效率,进而提高产能,而且还降低成本。
46.上所述仅为本实用新型的实施方式而已,并不用于限制本实用新型。对于本领域技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原理的内所作的任何修改、等同替换、改进等,均应包括在本实用新型的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1