一种类桶形工件内部狭小空间全方位焊接装置的制作方法
1.本发明属于焊接领域,具体涉及一种类桶形工件内部狭小空间全方位焊接装置。
背景技术:
2.工业领域许多设备设计为近似桶形,中间有狭窄、纵深的空间,例如大型阀门、厚壁管道等设备。此类设备制造过程中,内部缺陷不可完全避免。长期使用过程中,此类设备内壁也可能产生缺陷并发生扩展,危及设备的使用安全。及时消除此类缺陷并进行修复焊接可提高设备的安全系数。但由于此类设备中间的空间狭窄、纵深,人无法进入,即使人能勉强进入,在内部操作设备进行焊接修复难度很大,焊接质量极难保证。
技术实现要素:
3.本发明的目的在于提供一种类桶形工件内部狭小空间全方位焊接装置,解决了现有技术中存在的上述不足。
4.为了达到上述目的,本发明采用的技术方案是:
5.本发明提供的一种类桶形工件内部狭小空间全方位焊接装置,包括全方位固定环和焊接伸缩枪,其中,所述焊接伸缩枪滑动可转动在全方位固定环上,所述全方位固定环套装在工件上;
6.所述焊接伸缩枪包括驱动机构,所述驱动机构驱动连接有送丝焊枪和图像获取单元。
7.优选地,所述驱动机构包括驱动电机,所述驱动电机的输出轴驱动连接有驱动蜗杆;所述驱动蜗杆传动驱动有传动蜗杆,所述传动蜗杆驱动连接有送丝焊枪和图像获取单元。
8.优选地,所述驱动电机安装在固定机箱的一端;所述驱动蜗杆和传动蜗杆布置在固定机箱的内腔中;所述固定机箱的另一端滑动安装有伸缩机箱,所述送丝焊枪和图像获取单元安装在伸缩机箱上。
9.优选地,所述驱动蜗杆和传动蜗杆与固定机箱的内壁螺纹连接。
10.优选地,所述伸缩机箱远离驱动电机一端的外壁上固定有用于固定送丝焊枪的焊枪固定杆,所述焊枪固定杆上还安装有图像获取单元。
11.优选地,所述图像获取单元包括摄像头和显示器,其中,所述摄像头用于采集工件内腔的图像信息,并将采集到的图像信息传输到显示器。
12.优选地,所述全方位固定环包括固定环,所述固定环套装在工件上;所述固定环的圆周方向均布有多个螺纹固定销钉,所述螺纹固定销钉的一端固定有固定脚;所述固定环通过固定脚和螺纹固定销钉配合固定在工件上。
13.优选地,所述固定环包括两个半圆环,每个半圆环的中间结合部开设有燕尾槽;两个半圆环之间通过双燕尾固定销固定连接。
14.优选地,所述固定环的一端端面沿其周向方向布置有滑道,所述滑道配合连接有
滑块;所述滑块固定在焊接伸缩枪上。
15.优选地,所述滑道的顶部为球形结构,所述滑块的工作端为球形凹槽,所述球形凹槽与滑道的球形结构相配合。
16.与现有技术相比,本发明的有益效果是:
17.本发明提供的一种类桶形工件内部狭小空间全方位焊接装置,焊接伸缩枪滑动可转动安装在全方位固定环上,可沿固定环整圈滑动和任何位置的转动,实现全方位焊接;通过驱动机构带动送丝焊接和图像获取单元在工件的内腔中任意移动,通过图像获取单元得到工件内腔中的图像信息,操作人员能够根据图像信息对需要待焊接的部件进行焊接,该装置能够可对人员不便进入的狭窄空间进行内壁焊接作业,显著降低工作人员的现场操作难度,提高焊接质量。
18.进一步的,通过螺纹固定销钉和固定脚的配合能够使得固定环适用于多种外壁尺寸的类桶形工件。
19.进一步的,通过滑道和滑块的配合,能够实现焊接伸缩枪滑动可转动在全方位固定环上,进而实现多角度焊接。
附图说明
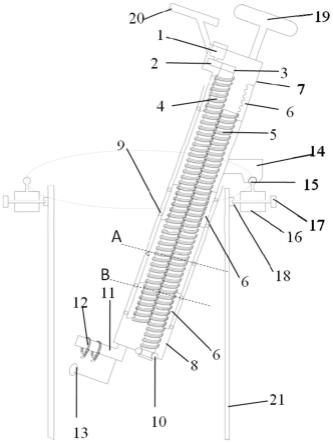
20.图1为焊接装置示意图;
21.图2为a截面示意图;
22.图3为b截面示意图;
23.图4为螺纹支撑块示意图;
24.图5为固定环结构示意图;
25.图6为双燕尾固定销位置示意图;
26.图7为燕尾槽示意图;
27.其中,1—驱动电机,2—驱动齿轮,3—涡杆齿轮,4—驱动涡杆,5—传动涡杆,6—螺纹支撑块,7—固定机箱,8—伸缩机箱,9—集箱滑动轴承,10—螺栓端部固定轴承,11—焊枪固定杆,12—绑扎带,13—摄像头,14—滑块,15—滑道,16—固定环,17—螺纹固定销钉,18—固定脚,19—控制手柄,20—显示器,21—环形工件,22—燕尾槽,23—双燕尾固定销。
具体实施方式
28.以下结合附图详细说明本发明的实施方式,但这些说明仅仅是示例性的,并不旨在对本发明的保护范围进行任何限制。
29.如图1至图7所示,本发明提供的一种类桶形工件内部狭小空间全方位焊接装置,包括全方位固定环和焊接伸缩枪,其中,焊接伸缩枪安装在全方位固定环上,沿全方位固定环周向滑动。
30.焊接伸缩枪包括固定机箱7,所述固定机箱7为方形框架结构,所述固定机箱7的内腔中设置有驱动机构。
31.所述固定机箱7的外侧滑动安装有伸缩机箱8,所述伸缩机箱8的一端与驱动机构驱动连接。
32.所述固定机箱7和伸缩机箱8之间通过集箱滑动轴承9实现两者之间的滑动连接。
33.所述伸缩机箱8与驱动机构连接的一端的外侧设置有送丝焊枪。
34.所述伸缩机箱8与驱动机构连接的一端的外侧还设置有用于获取工件21内腔图像的图像获取单元。
35.所述驱动机构包括驱动电机1,所述驱动电机1的输出轴驱动连接有驱动齿轮2,所述驱动齿轮2驱动连接有驱动蜗杆4。
36.所述驱动蜗杆4驱动连接有传动蜗杆5,所述传动蜗杆5远离驱动电机1的一端驱动连接有伸缩机箱8。
37.所述驱动齿轮2啮合连接有蜗杆齿轮3,所述蜗杆齿轮3套装在驱动蜗杆4上。
38.所述驱动蜗杆4和传动蜗杆5通过螺纹实现传动连接。
39.所述伸缩机箱8上安装有螺栓端部固定轴承10,所述传动蜗杆5与栓端部固定轴承10配合连接。
40.所述驱动蜗杆4和传动蜗杆5平行布置,所述驱动蜗杆4和传动蜗杆5均安装在螺纹支撑块6上,且驱动蜗杆4和传动蜗杆5与螺纹支撑块6螺纹连接;所述螺纹支撑块6固定安装在固定机箱7上。
41.所述螺纹支撑块6为块状结构,所述块状结构的一端面为圆弧结构,该圆弧结构的内表面设有外螺纹。
42.所述伸缩机箱8与传动蜗杆5连接的一端外壁上固定有焊枪固定杆11,所述焊枪固定杆11上设置有用于固定送丝焊枪的绑扎带12。
43.所述图像获取单元包括摄像头13和显示器20,其中,所述摄像头13固定在焊枪固定杆11上,用于采集工件21内腔的图像信息,并将采集到的图像信息传输到显示器20;所述显示器20安装在固定机箱7靠近驱动电机1的一端。
44.所述固定机箱7靠近驱动电机1的一端还设置有控制手柄19。
45.所述全方位固定环包括固定环16,所述固定环16套装在工件21上。
46.所述固定环16的圆周方向均布有多个螺纹固定销钉17,所述螺纹固定销钉17的一端固定有固定脚18;所述固定环16通过固定脚18和螺纹固定销钉17配合固定在工件21上。
47.所述固定环16包括两个半圆环,两个半圆环对接连接形成固定环16。
48.固定脚18与工件21的结合面为弧面,稳定固定销钉17与工件21之间的连接。
49.所述每个半圆环的中间结合部开设有燕尾槽22;两个半圆环之间通过双燕尾固定销23固定连接。
50.所述燕尾槽22沿固定环的轴向开设。
51.所述固定环16的一端端面沿其周向方向布置有滑道15,所述滑道15配合连接有滑块14。
52.所述滑块14固定在固定机箱7的侧壁上。
53.所述滑道15和滑块14的配合,使得焊接伸缩枪可沿工件的周向滑行,实现多角度焊接。
54.所述滑道15的顶部为球形,所述滑块14的工作端为球状凹槽,所述球状凹槽与滑道的顶部的球状结构相配合,该结构使得焊接伸缩枪可沿滑道横截面转动,实现多角度焊接。
55.本发明的工作过程:
56.驱动电机1带动驱动齿轮2转动,进而带动涡杆齿轮3和驱动涡杆4转动,带动传动涡杆5沿轴向伸缩运动。传动涡杆5带动伸缩机箱8沿轴向运动,伸缩机箱8顶部焊枪固定杆11,将送丝焊枪送到需要焊接修复的位置。固定机箱7通过滑块14与滑道15铰连接,实现固定机箱7既能沿滑道15周向转动,又能沿滑道15横截面转动,实现焊枪方位的改变。伸缩机箱8顶部的摄像头13将工件内部的画面实时传送到显示器20上,焊接技术人员通过观察显示器20上的图像操作控制手柄19进行焊接操作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1