一种装配式建筑用钢构件焊接机器人高空作业防掉落装置
1.本发明一种装配式建筑用钢构件焊接机器人高空作业防掉落装置涉及一种在装配式建筑用钢构件焊接机器人进行高空作业时放止掉落的装置,属于焊接设备技术领域。
2.
背景技术:
3.装配式建筑用钢构件是指装配式钢结构架组装过程中的各分部钢结构构件,相对于传统混凝土建筑而言,该类建筑用钢构件可以工厂化制作,通过吊装设备精确吊运后现场安装,并通过焊接机器人对钢构件之间进行现场焊接,可大大缩短工期,装配式建筑用钢构件的焊接通常需要焊接机器人进行高空作业,而传统的钢构件焊接机器人一般通过滚轮或滑块在滑轨上移动焊接,当在高空中进行水平或竖直移动时,由于焊接机器人的重心远离滑轨,重心偏移,容易导致焊接机器人从滑轨上掉落。
4.公开号cn209407678u公开了一种大型钢构件焊接机器人,定位装置包括升降杆、限位板、弹簧、两组立板和转轮,升降杆贯穿壳体的上表面升降设置;限位板水平设置在升降杆的顶端和底端的端面上;弹簧设置在位于升降杆的顶端的限位板和壳体的上表面之间;两组立板设置在上方的限位板的两侧;转轮转动设置在立板之间;压力传感器设置在壳体上;焊接头贯穿壳体的上表面竖直升降设置;液压装置设置在焊接头的下方,其控制系统与压力传感器连通;该焊接机器人通过转轮在滑轨上移动焊接,当在高空中进行水平或竖直移动时,由于焊接机器人的重心远离滑轨,重心偏移,容易导致焊接机器人从滑轨上掉落。
5.公开号cn208342077u公开了大型钢构件自动焊接机器人,它包括用于焊接机器人行走的轨道组件,在轨道组件上滑动配合安装有滑移板,所述滑移板和轨道组件之间安装有用于驱动整个滑移板移动的动力装置,在滑移板的顶部支撑安装有用于安装焊接装置的多轴机械手,所述多轴机械手的末端安装有用于焊接的焊枪;该焊接机器人通过滑块在滑轨上移动焊接,当在高空中进行水平或竖直移动时,由于焊接机器人的重心远离滑轨,重心偏移,容易导致焊接机器人从滑轨上掉落。
6.公开号cn215789822u公开了一种连续式免定位智能焊接机器人。包括滑台、滑轨、焊接工作台、焊枪、智能焊接机器人、龙门架、行走驱动系统、第一工件压紧机构、定位架、第二工件压紧机构及夹紧装置,其中第一工件压紧机构和定位架设置于焊接工作台上,焊接工作台的两侧设有滑台,滑台上设有滑轨,龙门架横跨于焊接工作台的两侧且与滑轨滑动连接;行走驱动系统设置于龙门架的底部;夹紧装置设置于龙门架一侧,用于将第二工件夹紧在定位架上;压紧装置设置于龙门架的顶部,用于从顶部压紧第二工件;智能焊接机器人设置于龙门架上,且执行末端与焊枪连接;该焊接机器人通过靠轮在滑轨上移动焊接,当在高空中进行水平或竖直移动时,由于焊接机器人的重心远离滑轨,重心偏移,容易导致焊接机器人从滑轨上掉落。
技术实现要素:
7.为了改善上述情况,本发明一种装配式建筑用钢构件焊接机器人高空作业防掉落装置提供了一种通过支撑滑槽对限位滑块的限位,同时通过限位滑块上的第一限位块和第二限位块相互配合进行进一步限位,防止机器人安装座上的焊接机器人在高空作业时从滑轨上掉落的装置。
8.本发明一种装配式建筑用钢构件焊接机器人高空作业防掉落装置是这样实现的:本发明一种装配式建筑用钢构件焊接机器人高空作业防掉落装置由限位组件和机器人安装组件组成,所述限位组件由限位分隔板、限位槽、支撑滑槽、第一限位槽、第二限位槽、滑动底座、条形纹槽和限位腔组成,优选的,所述滑动底座为矩形结构,所述滑动底座顶面为弧形面,所述滑动底座内开有限位腔,优选的,所述限位腔为矩形结构,所述限位腔一面为弧形面,所述限位腔内等距置有多个限位分隔板,所述限位分隔板一侧和限位腔一面相连接,所述限位分隔板另一侧和限位腔另一面相连接,相邻的限位分隔板和限位腔之间形成的空间构成多个支撑滑槽,所述支撑滑槽一侧开有第一限位槽,所述支撑滑槽另一侧开有第二限位槽,优选的,所述第一限位槽和第二限位槽相互错位,所述滑动底座顶面等距开有多个限位槽,优选的,多个限位槽和多个所述支撑滑槽一一对应,所述限位槽的宽度小于支撑滑槽的宽度,所述限位槽和对应的支撑滑槽相连通,所述滑动底座顶面开有多组条形纹槽,一组所述条形纹槽由多个条形纹槽组成,优选的,一组所述条形纹槽位于相邻的限位槽之间,同一组内多个所述条形纹槽沿滑动底座顶面等距分布,优选的,所述条形纹槽的深度小于限位槽的深度,所述机器人安装组件由机器人安装座、连接滑板、限位滑块、第一限位块、第二限位块和机器人安装槽组成,机器人安装座一面开有机器人安装槽,优选的,所述机器人安装座为弧形结构,所述机器人安装座的弧度和滑动底座顶面的弧度相对应,所述机器人安装座另一面和滑动底座顶面相接触,所述机器人安装座另一面等有置有多个连接滑板,优选的,多个所述连接滑板和多个所述限位槽相对应,所述连接滑板可滑动的置于对应的限位槽内,所述连接滑板一侧和机器人安装座另一面相连接,另一侧穿过对应的限位槽和限位滑块相连接,所述限位滑块可滑动的置于支撑滑槽内,优选的,所述限位滑块和支撑滑槽相接触,所述限位滑块一侧置有第一限位块,所述限位滑块另一侧置有第二限位块,优选的,所述第一限位块和第一限位槽相对应,所述第二限位块和第二限位槽相
对应,所述第一限位块可滑动的置于第一限位槽内,所述第二限位块可滑动的置于第二限位槽内,进一步的,所述支撑滑槽内壁等距开有多个底纹槽,所述底纹槽的长度和支撑滑槽的长度相同。
9.有益效果。
10.一、能够防止焊接机器人在高空作业进行移动焊接时从滑轨上掉落。
11.二、能够通过滑动底座上的条形纹槽减少滑动底座和机器人安装座之间的接触面积,进而在一定程度上减小摩擦,避免摩擦力过大影响机器人安装座带动焊接机器人顺畅移动进行高空焊接作业。
12.附图说明
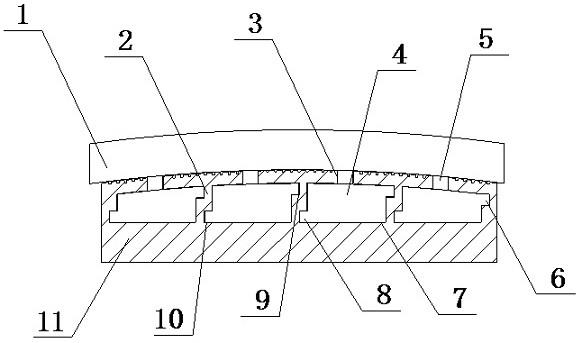
13.图1为本发明一种装配式建筑用钢构件焊接机器人高空作业防掉落装置的结构示意图;图2为本发明一种装配式建筑用钢构件焊接机器人高空作业防掉落装置的立体结构图,其仅仅展示了限位组件的结构;图3为本发明一种装配式建筑用钢构件焊接机器人高空作业防掉落装置的立体结构图,其仅仅展示了限位腔处的结构;图4为本发明一种装配式建筑用钢构件焊接机器人高空作业防掉落装置的结构示意图,其仅仅展示了限位组件的结构;图5为本发明一种装配式建筑用钢构件焊接机器人高空作业防掉落装置的立体结构图,其仅仅展示了机器人安装组件的结构;图6为本发明一种装配式建筑用钢构件焊接机器人高空作业防掉落装置的实施例2的结构示意图。
14.附图中其中为:机器人安装座(1),限位分隔板(2),限位槽(3),限位滑块(4),连接滑板(5),第一限位块(6),支撑滑槽(7),第二限位块(8),第一限位槽(9),第二限位槽(10),滑动底座(11),条形纹槽(12),限位腔(13),机器人安装槽(14),底纹槽(15)。
15.具体实施方式:实施例1:本发明一种装配式建筑用钢构件焊接机器人高空作业防掉落装置是这样实现的:由限位组件和机器人安装组件组成,所述限位组件由限位分隔板(2)、限位槽(3)、支撑滑槽(7)、第一限位槽(9)、第二限位槽(10)、滑动底座(11)、条形纹槽(12)和限位腔(13)组成,优选的,所述滑动底座(11)为矩形结构,所述滑动底座(11)顶面为弧形面,所述滑动底座(11)内开有限位腔(13),优选的,所述限位腔(13)为矩形结构,所述限位腔(13)一面为弧形面,所述限位腔(13)内等距置有多个限位分隔板(2),所述限位分隔板(2)一侧和限位腔(13)一面相连接,所述限位分隔板(2)另一侧和限位腔(13)另一面相连接,相邻的限位分隔板(2)和限位腔(13)之间形成的空间构成多个支撑滑槽(7),所述
支撑滑槽(7)一侧开有第一限位槽(9),所述支撑滑槽(7)另一侧开有第二限位槽(10),优选的,所述第一限位槽(9)和第二限位槽(10)相互错位,所述滑动底座(11)顶面等距开有多个限位槽(3),优选的,多个限位槽(3)和多个所述支撑滑槽(7)一一对应,所述限位槽(3)的宽度小于支撑滑槽(7)的宽度,所述限位槽(3)和对应的支撑滑槽(7)相连通,所述滑动底座(11)顶面开有多组条形纹槽(12),一组所述条形纹槽(12)由多个条形纹槽(12)组成,优选的,一组所述条形纹槽(12)位于相邻的限位槽(3)之间,同一组内多个所述条形纹槽(12)沿滑动底座(11)顶面等距分布,优选的,所述条形纹槽(12)的深度小于限位槽(3)的深度,所述机器人安装组件由机器人安装座(1)、连接滑板(5)、限位滑块(4)、第一限位块(6)、第二限位块(8)和机器人安装槽(14)组成,机器人安装座(1)一面开有机器人安装槽(14),优选的,所述机器人安装座(1)为弧形结构,所述机器人安装座(1)的弧度和滑动底座(11)顶面的弧度相对应,所述机器人安装座(1)另一面和滑动底座(11)顶面相接触,所述机器人安装座(1)另一面等有置有多个连接滑板(5),优选的,多个所述连接滑板(5)和多个所述限位槽(3)相对应,所述连接滑板(5)可滑动的置于对应的限位槽(3)内,所述连接滑板(5)一端和机器人安装座(1)另一面相连接,另一端穿过对应的限位槽(3)和限位滑块(4)相连接,所述限位滑块(4)可滑动的置于支撑滑槽(7)内,优选的,所述限位滑块(4)和支撑滑槽(7)相接触,所述限位滑块(4)一侧置有第一限位块(6),所述限位滑块(4)另一侧置有第二限位块(8),优选的,所述第一限位块(6)和第一限位槽(9)相对应,所述第二限位块(8)和第二限位槽(10)相对应,所述第一限位块(6)可滑动的置于第一限位槽(9)内,所述第二限位块(8)可滑动的置于第二限位槽(10)内,优选的,所述滑动底座(11)由高碳钢材料制成,高碳钢在经适当热处理或冷拔硬化后,具有高的强度和硬度、高的弹性极限和疲劳极限,切削性能尚可,原材料易得,生产成本低;使用时,将装配式建筑用钢构件焊接机器人安装在机器人安装座(1)上的机器人安装槽(14)内,控制限位滑块(4)在滑动底座(11)内的支撑滑槽(7)中进行滑动,进而带动机器人安装座(1)上的焊接机器人进行移动,对装配式建筑用钢构件之间的焊缝进行焊接;在焊接机器人进行移动焊接的过程中,由于支撑滑槽(7)对限位滑块(4)的限位,同时限位滑块(4)上的第一限位块(6)卡置于第一限位槽(9),第二限位块(8)卡置于第二限位槽(10)对限位滑块(4)进行进一步限位,可以防止通过连接滑板(5)和限位滑块(4)相连接的机器人安装座(1)上的焊接机器人在高空作业时从滑轨上掉落,导致焊接机器人摔坏,滑动底座(11)上的条形纹槽(12)可以减少滑动底座(11)和机器人安装座(1)之间的接触面积,进而在一定程度上减小摩擦,避免摩擦力过大影响机器人安装座(1)带动焊接机器人顺畅移动
进行高空焊接作业;实施例2:本实施例和实施例1的区别在于:所述支撑滑槽(7)内壁等距开有多个底纹槽(15),所述底纹槽(15)的长度和支撑滑槽(7)的长度相同;使用时,支撑滑槽(7)内壁的底纹槽(15)能够进一步的减小滑动底座(11)和机器人安装座(1)之间的接触面积,避免摩擦力过大影响机器人安装座(1)带动焊接机器人顺畅移动进行高空焊接作业;所述第一限位槽(9)和第二限位槽(10)相互错位的设计,能够分散焊接机器人自重产生的拉力,更利于通过第一限位块(6)和第二限位块(8)对限位滑块(4)进行进一步限位,防止机器人安装座(1)上的焊接机器人在高空作业时从滑轨上掉落;所述限位槽(3)的宽度小于支撑滑槽(7)的宽度的设计,能够使得支撑滑槽(7)对限位滑块(4)进行限位,防止焊接机器人在高空作业时从滑轨上掉落;所述机器人安装座(1)的弧度和滑动底座(11)顶面的弧度相对应的设计,能够使得机器人安装座(1)另一面和滑动底座(11)顶面相接触贴合,进而在带动焊接机器人高空焊接的移动过程中更加稳定;所述限位滑块(4)和支撑滑槽(7)相接触的设计,能够使得通过连接滑板(5)和限位滑块(4)相连接的机器人安装座(1)在移动过程中更加稳定;所述限位滑块(4)配合支撑滑槽(7),能够对和限位滑块(4)相连接的机器人安装座(1)进行限位,防止机器人安装座(1)上的焊接机器人高空作业时从滑轨上掉落;所述第一限位块(6)配合第二限位块(8)相互配合,能够对和限位滑块(4)相连接的机器人安装座(1)进行进一步限位,防止机器人安装座(1)上的焊接机器人高空作业时从滑轨上掉落;达到通过支撑滑槽(7)对限位滑块(4)的限位,同时通过限位滑块(4)上的第一限位块(6)和第二限位块(8)相互配合进行进一步限位,防止机器人安装座(1)上的焊接机器人高空作业时从滑轨上掉落的目的。
16.需要进一步指出的是,上述具体实施例在描述的时候,为了简单明了,仅仅描述了与其他实施例之间的区别,但是本领域技术人员应该知晓,上述具体实施例本身也是独立的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1