一种剃须刀刀头刀网转盘式嵌合加工设备的制作方法
1.本发明涉及自动化加工设备技术领域,尤其涉及一种剃须刀刀头刀网转盘式嵌合加工设备。
背景技术:
2.在剃须刀的生产过程中,刀网与刀头的尺寸一般是相匹配的,因此需要配套进行运输。因为刀网的中心需要加装端盖,因此在加工流程中,需要将刀头与刀网分开。在这个过程中,容易导致刀头丢失,使得刀网与刀头不能匹配,造成不良品增多的情况,增加了生产成本。
3.而且,现有的自动化设备不能进行对位安装,在加工过程中容易出现对位情况不佳而影响装配效果,甚至导致产品损坏。
4.因此,现有技术存在缺陷,需要改进。
技术实现要素:
5.本发明的目的是克服现有技术的不足,提供一种剃须刀刀头刀网转盘式嵌合加工设备。
6.本发明的技术方案如下:提供一种剃须刀刀头刀网转盘式嵌合加工设备,包括:机台、设置于所述机台一侧的上料机构、设置于所述机台另一侧的下料机构、设置于所述上料机构与下料机构之间的转盘机构、设置于所述转盘机构旁侧的冲压机构、设置于所述转盘机构旁侧的点胶机构、以及设置于所述转盘机构旁侧的来料机构,所述冲压机构设置于上料机构的后端,所述点胶机构设置于冲压机构的后端;
7.所述转盘机构上设置有若干治具,所述治具绕转盘机构的旋转中心均匀分布于转盘机构上,所述转盘机构的旁侧设置有两组移料机构,所述移料机构分别设置于转盘机构与上料机构之间以及转盘机构与下料机构之间,所述治具上设置有第一放置槽与第二放置槽,所述转盘机构对应来料机构与移料机构之间设置有上视觉检测机构,靠近所述上料机构一侧的移料机构与转盘机构之间设置有下视觉检测机构,所述移料机构包括旋转取料机构,所述旋转取料机构包括旋转电机、以及设置于所述旋转电机的输出端上的第一取料头。
8.进一步地,所述移料机构还包括:设置于所述机台上的移料送料带、设置于所述移料送料带后端的立式支架、设置于所述立式支架上的移料移动机构、以及设置于所述移料移动机构的运动端上的移料支架,所述旋转取料机构设置于移料支架上。
9.进一步地,靠近所述下料机构的移料机构上设置有限位机构,所述限位机构包括:限位气缸、与所述限位气缸的输出端连接的联动块、以及与所述联动块连接的两组限位板,所述限位板分别与移料送料带对应,所述限位板上设置有若干限位槽。
10.进一步地,所述上料机构与下料机构均包括:设置于所述机台上的上下料送料组件、悬于所述上下料送料组件上方的上下料移动机构、设置于所述上下料移动机构的运动端上的升降机构、设置于所述升降机构的运动端上的上下料支架、以及设置于所述上下料
支架上的若干上下料取料头。
11.进一步地,所述上下料取料头分成两组设置于上下料支架上。
12.进一步地,所述上料机构以及下料机构的旁侧均设置有升降料仓。
13.进一步地,所述转盘机构上方设置有装配视觉检测机构,所述装配视觉检测机构设置于所述上料机构旁侧的移料机构与冲压机构之间。
14.进一步地,所述点胶机构包括:设置于所述转盘机构旁侧的点胶支架、设置于所述点胶支架上的点胶直线移动模组、设置于所述点胶直线模组的运动端上的点胶固定板、设置于所述点胶固定板的一端的点胶头、以及设置于所述点胶固定板的另一端上的点胶视觉检测机构。
15.进一步地,所述转盘机构的旁侧设置有分拣机构,所述分拣机构设置于靠近下料机构的移料机构的后端,所述分拣机构包括:设置于所述机台上的分拣升降气缸、设置于所述分拣升降气缸的输出端上的旋转气缸、设置于所述旋转气缸的输出端上的旋转臂、以及设置于所述旋转臂上的两个分拣取料头,所述分拣取料头分别与治具的第一放置槽以及第二放置槽对应,所述分拣机构的旁侧设置有不良品仓或不良品滑槽
16.采用上述方案,本发明通过将刀网与刀头分离的同时,利用治具的第一放置槽以及第二放置槽同时运送刀网与刀头,使得刀头可以在刀网与端盖进行加工的同时,随着刀网进行移动,便于在完成刀网与端盖的装配后保证刀网与刀头之间的匹配关系。同时,通过对端盖以及刀网进行图像识别,从而实现对位安装,避免因偏位而影响端盖与刀网之间的装配效果。
附图说明
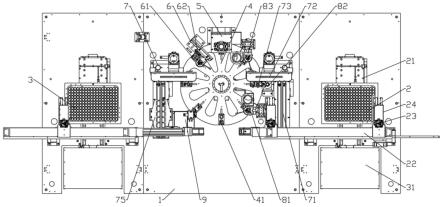
17.图1为本发明的结构示意图。
18.图2为上料机构与转盘机构的结构示意图。
19.图3为图2中a处局部放大示意图。
20.图4为下料机构与移料机构的结构示意图。
具体实施方式
21.以下结合附图和具体实施例,对本发明进行详细说明。
22.请参阅图1至图3,本发明提供一种剃须刀刀头刀网转盘式嵌合加工设备,包括:机台1、设置于所述机台1一侧的上料机构2、设置于所述机台1另一侧的下料机构3、设置于所述上料机构2与下料机构3之间的转盘机构4、设置于所述转盘机构4旁侧的冲压机构5、设置于所述转盘机构4旁侧的点胶机构6、以及设置于所述转盘机构4旁侧的来料机构。所述冲压机构5设置于上料机构2的后端,所述点胶机构6设置于冲压机构5的后端。
23.所述转盘机构4上设置有若干治具41,所述治具41绕转盘机构4的旋转中心均匀分布于转盘机构4上,所述治具41上设置有第一放置槽411与第二放置槽412。所述转盘机构4的旁侧设置有两组移料机构7,所述移料机构7分别设置于转盘机构4与上料机构2之间以及转盘机构4与下料机构3之间。所述转盘机构4对应来料机构与移料机构7之间设置有上视觉检测机构81,靠近所述上料机构2一侧的移料机构7与转盘机构4之间设置有下视觉检测机构82。所述移料机构7包括旋转取料机构74,所述旋转取料机构74包括旋转电机741、以及设
置于所述旋转电机741的输出端上的第一取料头742。
24.工作时,来料机构从前端工序将端盖放置于治具41的第一放置槽411中。转盘机构4移动至上视觉检测机构81对应位置,从而对端盖上的嵌块的位置进行图像获取,并上传至系统中进行图像分析。然后转盘机构4将治具41移动至移料机构7旁侧。将装载有刀头及刀网的托盘移动至上料机构2上,此时刀头放置于刀网中。上料机构2将刀头与刀网进行分离,并对刀网与刀头分别进行拾取与移动,将刀网与刀头分别移动至移料机构7上。然后移料机构7同时拾取刀网与刀头并进行移动。刀网在移料机构7的运送下经过下视觉检测机构82上方,从而对刀网的图像进行获取识别,并上传至系统中进行图像分析。系统对端盖与刀网进行图像比对分析后,向旋转取料机构74输出相应的控制信号,从而通过旋转电机741驱动第一取料头742进行旋转,调节刀网的角度位置,以便于与治具41第一放置槽411中的端盖进行匹配。完成刀网的校正后,移料机构7将刀网与刀头分别放置到治具41的第一放置槽411以及第二放置槽412中,使得端盖与刀网进行预装配。
25.完成刀网与端盖的预装配后,转盘机构4将治具41移动在冲压机构5对应位置,通过冲压机构5对刀网以及端盖进行冲压,使得嵌块折弯压紧于刀网上,实现刀网与端盖的压紧固定。然后转盘机构4将治具41移动至点胶机构6对应位置,通过点胶机构6往刀网与端盖的接合处进行注胶,从而完成刀网与端盖的装配固定。随后通过转盘机构4将治具41移动至靠近下料机构3的移料机构7旁侧,通过移料机构7分别拾取刀头以及完成装配的刀网,再由下料机构3将刀头放置于刀网中进行下料,完成刀头刀网的整个加工流程,并且使得配套的刀头及刀网可以同时进行运送,防止出现不匹配或丢失的情况。
26.所述移料机构7还包括:设置于所述机台1上的移料送料带71、设置于所述移料送料带71后端的立式支架、设置于所述立式支架上的移料移动机构72、以及设置于所述移料移动机构72的运动端上的移料支架73。所述旋转取料机构74设置于移料支架73上。上料机构2将刀头与刀网分别放置于不同的移料送料带71上,通过两组移料取料头进行取料,以便于将刀头及刀网同时放置于第一放置槽411以及第二放置槽412中;同样的,通过下料机构3旁侧的移料机构7同时取出刀网及刀头,并放置于不同的移料送料带71上,以便于下料机构3进行拾取,提高上下料的效率。
27.请参阅图4,靠近所述下料机构3的移料机构7上设置有限位机构75。所述限位机构75包括:限位气缸、与所述限位气缸的输出端连接的联动块、以及与所述联动块连接的两组限位板。所述限位板分别与移料送料带71对应,所述限位板上设置有若干限位槽。限位气缸周期性的驱动限位板进行上下移动,从而将多组刀网及刀头限制于限位槽中,以便于下料机构3进行拾取。
28.所述上料机构2与下料机构3均包括:设置于所述机台1上的上下料送料组件21、悬于所述上下料送料组件21上方的上下料移动机构22、设置于所述上下料移动机构22的运动端上的升降机构23、设置于所述升降机构23的运动端上的上下料支架24、以及设置于所述上下料支架24上的若干上下料取料头。
29.所述上下料取料头分成两组设置于上下料支架24上。
30.所述上料机构2以及下料机构3的旁侧均设置有升降料仓31。
31.工作前,将装载有刀网及刀头的托盘叠放于上料机构的升降料仓31中。工作时,上料机构2的升降料仓31将一个托盘送到上料机构2的上下料送料组件21上进行送料,并通过
上下料移动机构22以及升降机构23驱动两组上下料取料头依次拾取刀头与刀网,然后同时放置于移料送料带71上,通过移料机构7将刀网与刀头移送至治具41中。完成加工后,移料机构7将刀网与刀头移动至移料送料机构71上,并通过限位机构75将多组刀网及刀头进行对应及分组。下料机构3的两组上下料取料头同时拾取刀网及刀头,并依次放置入下料机构3的上下料送料组件21上的托盘中。当托盘满载时,通过上下料送料组件21将托盘送入升降料仓31,从而便于出料。
32.所述转盘机构4上方设置有装配视觉检测机构83,所述装配视觉检测机构83设置于所述上料机构2旁侧的移料机构7与冲压机构5之间。通过设置装配视觉检测机构83,从而便于在完成刀网与端盖的预装配之后,获取刀网及端盖的装配情况,判断是否有实现对位装配,以此对产品进行检测。
33.所述点胶机构6包括:设置于所述转盘机构4旁侧的点胶支架、设置于所述点胶支架上的点胶直线移动模组、设置于所述点胶直线模组的运动端上的点胶固定板、设置于所述点胶固定板的一端的点胶头61、以及设置于所述点胶固定板的另一端上的点胶视觉检测机构62。当冲压机构5完成端盖及刀网的冲压装配之后,转盘机构4将治具41移动在点胶机构6对应位置处。通过点胶视觉检测机构62获取刀网的图像信息,从而检测冲压装配的情况,并且对点胶位进行识别。然后启动点胶直线移动模组,使得点胶头61移动至刀网上方,并进行点胶,从而实现刀网与端盖的点胶粘合固定。完成点胶后,可以通过点胶视觉检测机构62再次进行图像获取,从而确认点胶效果,并对刀网与端盖进行最终成品判定。
34.所述转盘机构4的旁侧设置有分拣机构9,所述分拣机构9设置于靠近下料机构3的移料机构7的后端,所述分拣机构9包括:设置于所述机台1上的分拣升降气缸、设置于所述分拣升降气缸的输出端上的旋转气缸、设置于所述旋转气缸的输出端上的旋转臂、以及设置于所述旋转臂上的两个分拣取料头,所述分拣取料头分别与治具的第一放置槽411以及第二放置槽412对应,所述分拣机构9的旁侧设置有不良品仓或不良品滑槽。通过点胶视觉检测机构62对刀网与端盖的装配效果进行图像获取与识别,从而判断成品是否合格,并且检测刀头是否丢失。如果出现不良的情况,则移料机构7不对不良品进行拾取,使得不良品在转盘机构4的运送下移动至分拣机构9下方,通过分拣升降气缸驱动分拣取料头进行升降,从而拾取治具41内的产品,并通过旋转气缸驱动分拣取料头移动至不良品仓或不良品滑槽上方,将不良品投入到不良品仓或不良品滑槽中,实现不良品的分拣。
35.综上所述,本发明通过将刀网与刀头分离的同时,利用治具的第一放置槽以及第二放置槽同时运送刀网与刀头,使得刀头可以在刀网与端盖进行加工的同时,随着刀网进行移动,便于在完成刀网与端盖的装配后保证刀网与刀头之间的匹配关系。同时,通过对端盖以及刀网进行图像识别,从而实现对位安装,避免因偏位而影响端盖与刀网之间的装配效果。
36.以上仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1