一种机器人焊接提升机料斗的半自动定位工装的制作方法
1.本实用新型属于焊接定位工装技术领域,尤其涉及一种机器人焊接提升机料斗的半自动定位工装。
背景技术:
2.目前提升机料斗的焊接过程一般采用先用简易定位工装点焊好后,再由工人满焊,满焊过程中需要由工人用人力将料斗翻转。由于每个工人的焊接技术水平不一致,不能保证提升机料斗的焊接质量一致合格。本发明的发明目的是为了克服现有提升机料斗焊接工艺技术的不足,提供一种半自动机器人焊接定位工装机构,以提高提升机料斗的焊接精度和焊接质量,降低工人的劳动强度,提高劳动生产效益。
技术实现要素:
3.本实用新型的目的在于提供一种机器人焊接提升机料斗的半自动定位工装,本实用新型的定位工装可以提高提升机料斗的焊接精度和焊接质量,在焊接过程中减少了焊接过程中人工翻动,降低工人的劳动强度。为了实现上述目的,本实用新型采用以下技术效果:
4.根据本实用新型的一个方面,提供了一种机器人焊接提升机料斗的半自动定位工装,包括安装于焊接机器人一侧的一对平行导轨,在平行导轨上设置有用于承载料斗在平行导轨上移动的移动升降平台,在平行导轨两侧设置有用于夹持承载于移动升降平台上的料斗进行翻转的夹持翻转机构,所述移动升降平台包括底座、水平支撑台和剪刀叉升降机构,在底座前后两端的外侧分别设置有行走滚轮,所述剪刀叉升降机构的下端连接在底座上,剪刀叉升降机构的上端连接在所述水平支撑台的下表面,所述底座的底部通过行走滚轮安装于所述平行导轨上,在所述底座下方设置有曲杆,该曲杆的后端连接在靠近剪刀叉升降机构的下端,所述曲杆的弯曲部转动连接在底座上,所述曲杆的前端由底座的后侧下方向前侧下方延伸至剪刀叉升降机构的下端前方。
5.上述方案优选的,在剪刀叉升降机构包括中间轴、上同步连接轴、下同步连接轴和位于底座与水平支撑台之间的两对称设置的剪刀叉臂,两对剪刀叉臂的中间分别与中间轴的两端转动连接,两对剪刀叉臂的上端之间分别通过上同步连接轴转动连接,两对剪刀叉臂的前侧下端之间分别转动连接在底座上,两对剪刀叉臂的后侧下端之间分别通过下同步连接轴滑动连接在底座上,所述曲杆的后端连接在靠近下同步连接轴的前方。
6.上述方案优选的,在靠近所述下同步连接轴一侧前方的两对剪刀叉臂的下端之间设置有驱动连接轴,在驱动连接轴上设置有一对驱动连接座,一对驱动连接座之间分别设置有相互对称的滑道口,在一对驱动连接座之间的滑道口上设置有滑动连接轴,在驱动连接座的下侧前方的底座上设置有铰接座,所述曲杆的后端通过滑动连接轴连接在驱动连接轴的滑道口上,所述曲杆的弯曲部转动连接在底座的下表面,所述曲杆的弯曲部转动连接在铰接座上,所述曲杆的前端由底座的后侧下方向前侧下方水平延伸至底座的前侧。
7.上述方案优选的,在所述下同步连接轴的两端分别设置有滑动滚轮,两对剪刀叉臂的后侧下端之间分别通过下同步连接轴两端的滑动滚轮滑动设置在底座上。
8.上述方案优选的,在底座的后侧上表面且沿滑动滚轮滚动方向上设置有滑动限位框,该滑动滚轮滚动接触设置于滑动限位框与底座之间。
9.上述方案优选的,在所述曲杆的前端端部上连接有踏板,在所述底座的前侧侧壁上设置有拉杆,该拉杆的一端转动连接在底座的前侧侧壁上,所述拉杆的另一端可拆卸连接在靠近踏板一侧的曲杆的前端端部上。
10.上述方案优选的,在靠近拉杆一侧的底座的前侧侧壁上设有沿竖直方向固定的推手。
11.上述方案优选的,所述夹持翻转机构包括设置于平行导轨两侧且相互对称的第一支撑架和第二支撑架,在第一支撑架的顶端内侧设置有第一夹持头,在第二支撑架的顶端内侧设置有与所述第一夹持头对称的第二夹持头,所述第一夹持头通过第一转动轴转动设置在所述第一支撑架的顶端上,在第一支撑架的顶端外侧设置有连接在第一转动轴上的转动盘,在第一支撑架的顶端外侧设置有卡栓,在转动盘的外侧的第一转动轴上螺纹连接有转动调节杆,所述第二夹持头通过第二滑动轴设置在第二支撑架的顶端,所述第二夹持头转动连接在第二支撑架内侧的第二滑动轴内端部上,在第二支撑架的外侧设置有与第二滑动轴外端部传动的推拉肘夹。
12.上述方案优选的,在转动盘的圆周上设置有与所述卡栓对应的卡位口
13.综上所述,本实用新型采用了上述技术方案,本实用新型具有以下技术效果:
14.本实用新型的半自动定位工装可以提高提升机料斗的焊接精度和焊接质量,提升机料斗在升降和翻转过程中能进行有效控制,便于在进入大致位置后,进行水平转动调节和竖直方向升降位置定位调节;在焊接过程中减少了焊接过程中人工翻动,降低工人的劳动强度。
附图说明
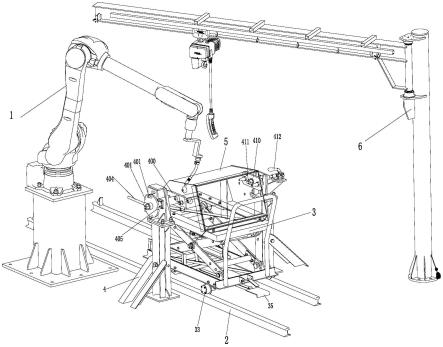
15.图1是本实用新型的一种机器人焊接提升机料斗的半自动定位工装的安装结构示意图;
16.图2是本实用新型的一种机器人焊接提升机料斗的半自动定位工装的侧视结构示意图;
17.图3是本实用新型的移动升降平台的轴向结构示意图;
18.图4是本实用新型的移动升降平台的内部安装结构示意图;
19.图5是本实用新型的移动升降平台的侧视结构示意图;
20.图6是本实用新型的夹持翻转机构与移动升降平台之间的定位安装结构示意图;
21.附图中,焊接机器人1,平行导轨2,移动升降平台3,夹持翻转机构4,悬臂吊车5,提升机料斗6,底座30、水平支撑台31,剪刀叉升降机构32,行走滚轮33,曲杆34,踏板35,拉杆36,推手37,中间轴320,上同步连接轴321,下同步连接轴322,剪刀叉臂323,驱动连接轴324,驱动连接座325,滑道口326,滑动连接轴327,铰接座328,滑动滚轮329,滑动限位框330,第一支撑架40,第二支撑架41,第一夹持头400,第一转动轴401,转动盘402,卡栓403,转动调节杆404,卡位口405,第二夹持头410,第二滑动轴411,推拉肘夹412。
具体实施方式
22.为使本实用新型的目的、技术方案及优点更加清楚明白,以下参照附图并举出优选实施例,对本实用新型进一步详细说明。然而,需要说明的是,说明书中列出的许多细节仅仅是为了使读者对本实用新型的一个或多个方面有一个透彻的理解,即便没有这些特定的细节也可以实现本实用新型的这些方面。
23.结合图1、图2和图3所示,根据本实用新型的一种机器人焊接提升机料斗的半自动定位工装,包括安装于焊接机器人1一侧的一对平行导轨2,在平行导轨2上设置有用于承载提升料斗在平行导轨2上移动的移动升降平台3,在平行导轨2两侧设置有用于夹持承载于移动升降平台3上的料斗进行翻转的夹持翻转机构4,所述移动升降平台3包括底座30、水平支撑台31和剪刀叉升降机构32,在底座30前后两端的外侧分别设置有行走滚轮33,所述剪刀叉升降机构32的下端连接在底座30上,剪刀叉升降机构32的上端连接在所述水平支撑台31的下表面,所述底座30的底部通过行走滚轮33安装于所述平行导轨2上,在所述底座30下方设置有曲杆34,该曲杆34的后端连接在靠近剪刀叉升降机构32的下端,所述曲杆34的弯曲部转动连接在底座30上,所述曲杆34的前端由底座30的后侧下方向前侧下方延伸至剪刀叉升降机构32的下端前方,通过悬臂吊车5将提升机料斗6吊装至移动升降平台3的水平支撑台31上,然后移动至夹持翻转机构4处,通过剪刀叉升降机构32调节提升料斗6在水平支撑台31的高度,然后通过夹持翻转机构4进行夹持固定,此时方可使用机器人焊接台1对提升机料斗6进行焊接,当焊接下一个焊接点时,通过剪刀叉升降机构32再次调节提升机料斗6在水平支撑台31的高度低于夹持翻转机构4的高度,然后通过夹持翻转机构4翻转所述提升料斗6,再通过调节剪刀叉升降机构32的高度,使提升料斗6支撑固定在水平支撑台31上对下一个焊接点进行焊接,为此,用悬臂吊车5吊装点焊好的提升机料斗6到移动升降平台3上,推动移动升降平台3将提升机料斗6转运至夹持翻转机构4处,夹持翻转机构4将提升机料斗6定位固定好后,由焊接机器人按照设定好的焊接程序进行料斗的自动焊接。
24.在本实用新型中,结合图1、图2、图3、图4和图5所示,在剪刀叉升降机构32包括中间轴320、上同步连接轴321、下同步连接轴322和位于底座30与水平支撑台之间的两对称设置的剪刀叉臂323,两对剪刀叉臂4的中间分别与中间轴3的两端转动连接,两对剪刀叉臂323的上端之间分别通过上同步连接轴321转动连接,两对剪刀叉臂323的前侧下端之间分别转动连接在底座30上,两对剪刀叉臂323的后侧下端之间分别通过下同步连接轴322滑动连接在底座30上,所述曲杆34的后端连接在靠近下同步连接轴322的前方,在靠近所述下同步连接轴322一侧前方的两对剪刀叉臂323的下端之间设置有驱动连接轴324,在驱动连接轴324上设置有一对驱动连接座325,一对驱动连接座325之间分别设置有相互对称的滑道口326,该滑道口326为弧形滑道口,在一对驱动连接座325之间的滑道口326上设置有滑动连接轴327,在驱动连接座325的下侧前方的底座30上设置有铰接座328,所述曲杆34的后端通过滑动连接轴327连接在驱动连接轴324的滑道口326上,所述曲杆34的弯曲部转动连接在底座30的下表面,所述曲杆34的弯曲部转动连接在铰接座328上,所述曲杆34的前端由底座30的后侧下方向前侧下方水平延伸至底座30的前侧,在所述曲杆34的前端端部上连接有踏板35,在所述底座30的前侧侧壁上设置有拉杆36,该拉杆36的一端转动连接在底座30的前侧侧壁上,所述拉杆36的另一端可拆卸连接在靠近踏板35一侧的曲杆34的前端端部上,在所述下同步连接轴322的两端分别设置有滑动滚轮329,两对剪刀叉臂323的后侧下端之
间分别通过下同步连接轴322两端的滑动滚轮329滑动设置在底座30上的水平支撑台31后,推动剪刀叉升降机构32通过行走滚轮33在导轨2上移动至夹持翻转机构4处,通过踩踏所述踏板35,使曲杆34在底座30上的铰接座328转动时,曲杆34的后端推动所述滑动连接轴327在滑道口326滑动,该滑动连接轴327将推动驱动连接轴324驱动剪刀叉臂323向上运动,滑动连接轴327在滑道口326内推动驱动连接座325,使驱动连接轴324带动剪刀叉臂323在竖直方向升降位置达到定位调节的目的,此时,剪刀叉臂323沿中间轴320转动合拢时,下同步连接轴322通过带动滑动滚轮329在底座30上滚动,并使剪刀叉臂323在合拢过程中逐渐上升,从而带动水平支撑台31上的升机料斗6提升到预定高度后,将拉杆36与曲杆34扣接连接后,使拉杆36与曲杆34进行固定,防止曲杆34转动导致剪刀叉臂323下降。
25.在本实用新型中,结合图1、图3、图4和图5所示,在底座30的后侧上表面且沿滑动滚轮329滚动方向上设置有滑动限位框330,该滑动滚轮329滚动接触设置于滑动限位框330与底座30之间,在靠近拉杆36一侧的底座30的前侧侧壁上设有沿竖直方向固定的推手37,用悬臂吊车6吊装点焊好的提升机料斗5到水平支撑台31后,通过推手37推动底座30,使底座30通过行走滚轮33在导轨2上移动至夹持翻转机构4这一定位工装处,再踩动踏板35,使曲杆34驱动所述剪刀叉臂323合拢而推动所述水平支撑台31上的提升机料斗5上升,此时剪刀叉臂323的下端在下同步连接轴322的两端转动时,推动所述剪刀叉臂323上升或下降运动时,并带动滑动滚轮329在滑动限位框330内滚动,从而可通过限制滑动滚轮329滚动的距离,以达到限制剪刀叉臂323合拢上升或张开下降的目的。
26.在本实用新型中,结合图1、图2和图6所示,所述夹持翻转机构4包括设置于平行导轨2两侧且相互对称的第一支撑架40和第二支撑架41,在第一支撑架40的顶端内侧设置有第一夹持头400,在第二支撑架41的顶端内侧设置有与所述第一夹持头400对称的第二夹持头410,所述第一夹持头400通过第一转动轴401转动设置在所述第一支撑架40的顶端上,在第一支撑架40的顶端外侧设置有连接在第一转动轴401上的转动盘402,在第一支撑架40的顶端外侧设置有卡栓403,在转动盘402的外侧的第一转动轴401上螺纹连接有转动调节杆404,在转动盘402的圆周上设置有与所述卡栓403对应的卡位口405,所述第二夹持头410通过第二滑动轴411设置在第二支撑架41的顶端,所述第二夹持头410转动连接在第二支撑架41内侧的第二滑动轴411内端部上,在第二支撑架41的外侧设置有与第二滑动轴411外端部传动的推拉肘夹412。通过推动移动升降平台3将提升机料斗6转运至夹持翻转机构4处,操作夹持翻转机构4将提升机料斗6进行定位固定时,先通过推拉肘夹412推动所述第二滑动轴411在第二支撑架41顶端内的轴承座内滑动,从而推动第二夹持头410向第一夹持头400方向一侧滑动,此时第二夹持头410将推动提升机料斗6的夹持固定点与第一夹持头400进行接触夹紧后,锁紧推拉肘夹412,使第一夹持头400和第二夹持头410夹持在提升机料斗6的外壁上,然后转动所述转动调节杆404,使转动调节杆404在转动盘402的外侧的第一转动轴401上逐渐拧紧并靠近第一支撑架40的顶端外侧壁,通过转动盘402将第一转动轴401拧紧在第一支撑架40上,此时,可推动提升机料斗6的两端在第二夹持头410和第一夹持头400之间且沿第一转动轴401与第二滑动轴411之间转动,转动到预焊件点位置后,再通过第一支撑架40的顶端外侧的卡栓403放入卡位口405内,并通过螺母将卡栓403拧紧固定在转动盘402,使提升机料斗6稳定并紧固定位在整个定位工装上,从而防止第一转动轴401转动或前后滑动,此时,由焊接机器人按照设定好的焊接程序进行料斗的自动焊接,从而可提高提
升机料斗的焊接精度和焊接质量,减少焊接过程中人工翻动,降低工人的劳动强度,焊接完成后,松动推拉肘夹412和转动盘402,使提升机料斗6放置在水平支撑台31上,推动移动升降平台3驶离焊接机器人1的焊接点位置,然后通过悬臂吊车5将提升机料斗6吊离移动升降平台3,整个焊接过程中减少了人工翻动提升机料斗6,降低工人的劳动强度。
27.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1