一种导电片的焊接夹具的制作方法
1.本实用新型涉及焊接夹具领域,具体涉及一种导电片的焊接夹具。
背景技术:
2.在低压电器行业中,导电片是整个导电系统的重要组成元件,是连接外部电路和导电系统的桥梁,其质量的好坏直接关系到与外部电路的导通。现有焊接夹具通常是由作业人员手工夹持焊接,由于缺乏辅助焊接夹具,使得焊接后成品状态不统一,合格率极低,给企业造成了严重的经济损失。
技术实现要素:
3.本实用新型的目的在于克服现有技术的缺陷,提供一种效率高、可靠性高以及安全性能较好的导电片的焊接夹具。
4.为实现上述目的,本实用新型采用了如下技术方案:
5.一种导电片的焊接夹具,包括定位机构、焊接机构、运动组件、出料机构以及控制驱动机构,控制驱动机构分别与焊接机构和运动组件连接,所述运动组件包括第一直线运动机构和与第一直线运动机构连接的第一夹持机构,第一夹持机构包括可以被驱动夹紧或打开的夹爪,第一直线运动机构用于驱动夹爪在固定组件和出料机构之间进行直线往复运动,
6.所述定位机构包括固定组件和第一夹持机构的夹爪,焊接时,固定组件定位第一导电片与第二导电片,且第一夹持机构驱动夹爪夹紧固定第二导电片,
7.焊接机构用于将第一导电片与第二导电片焊接为导电片成品,在焊接后由运动组件通过夹爪将导电片成品带离固定组件并移动到出料机构。
8.进一步,包括底板,固定组件和第一直线运动机构分别设置于底板的两端,所述运动组件还包括滑动块和线性滑轨,线性滑轨设置在固定组件和运动组件之间,滑动块与线性滑轨滑动配合且与第一直线运动机构连接,第一夹持机构设置在滑动块上,所述出料机构设置在线性滑轨的一侧,其包括第二直线移动机构和下料板,第二直线移动机构驱动下料板伸入或移出与夹爪相对的线性滑轨上方。
9.进一步,还包括缓冲装置,所述缓冲装置位于固定组件和第一直线运动机构之间且靠近固定组件设置,缓冲装置与滑动块配合,用于为滑动块提供缓冲作用。
10.进一步,还包括感光保护装置,感光保护装置包括感光传感器,感光传感器监测将第一导电片与第二导电片装入固定组件的操作区域,当感光保护装置被遮挡时,感光保护装置向控制驱动机构反馈信号,控制驱动机构使运动组件以及焊接机构停止工作。
11.进一步,所述控制驱动机构包括气源控制系统,所述气源控制系统包括plc、电磁阀、第一磁性开关、第二磁性开关和第三磁性开关,
12.所述第一直线运动机构包括第一气缸,第一夹持机构包括第二气缸,所述plc通过电磁阀控制第一气缸进行直线往复运动,由第一磁性开关向plc反馈第一气缸的位置信号,
所述plc通过电磁阀控制第二气缸驱动夹爪夹紧或打开,由第二磁性开关向plc反馈夹爪的状态信号;
13.所述第二直线移动机构包括第三气缸,plc通过电磁阀控制第三气缸进行直线往复运动,由第三磁性开关向plc反馈第三气缸的位置信号。
14.进一步,焊接机构包括相对设置的第一电极和第二电极,所述第二电极位于第一电极上方且能够相对固定组件上下移动。
15.进一步,所述固定组件包括底座、第一导电片定位件和第二导电片支撑件,所述底座固定于焊接机构的一侧,第一导电片定位件设置在底座上,第一导电片定位件设有用于定位第一导电片的定位槽,第二导电片支撑件固定于面向运动组件的一侧以承载第二导电片。
16.进一步,所述第一导电片定位件包括x向定位块和y向定位块,y向定位块固定于底座用于在y方向定位第一导电片,x向定位块固定于y向定位块面向焊接机构的一侧,在x向定位块设有所述定位槽;所述第二导电片支撑件包括支撑块和支撑杆,所述支撑块设置于底座面向夹爪的一侧,支撑杆支撑于支撑块上,支撑杆的中部与定位槽相对。
17.进一步,所述缓冲装置包括挡块和油压缓冲器,所述挡块的一端与底板固定连接,挡块的另一端设有缓冲滑动块碰撞的油压缓冲器。
18.进一步,所述感光保护装置包括防护板、定位片和感光传感器,所述防护板与底板固定连接并遮盖滑动块的运动空间,感光传感器通过定位片固定于防护板的一侧。
19.本实用新型的焊接机构以及运动组件分别受控于控制驱动机构,在第一导电片与第二导电片进行焊接时,由定位机构的固定组件与夹爪相互配合夹紧定位第二导电片,并在完成后夹爪将导电片成品带离固定组件移动到出料机构,相比人工夹持焊接,固定组件与夹爪配合夹持定位具备状态稳定的优点,利于保证成品的状态统一性以及提高合格率,并且夹爪直接将导电片成品移动到出料机构,提高了焊接节奏和效率。
20.此外,由plc控制焊接机构工作以及运动组件的驱动,使配合过程按照规定的动作有序进行,减少人工操作,利于提高产品的合格率。
21.此外,通过设置安全预防系统提高焊接过程的稳定性与安全性,由缓冲装置与滑动块配合,避免滑动块在撞击过程中干扰夹爪对第二导电片的夹紧定位,在通电状态下,当感光保护装置被遮挡后,使焊接机构以及运动组件停止工作,为操作人员提供了安全保障。
附图说明
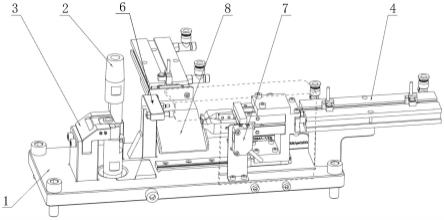
22.图1是本实用新型一种导电片的焊接夹具的结构示意图;
23.图2是本实用新型一种导电片的焊接夹具中定位机构的结构示意图;
24.图3是本实用新型一种导电片的焊接夹具中第一气缸、第二气缸以及第三气缸的结构示意图;
25.图4是本实用新型一种导电片的焊接夹具中出料机构的结构示意图;
26.图5是本实用新型一种导电片的焊接夹具中安全预防系统的结构示意图;
27.图6是本实用新型一种导电片的焊接夹具中焊接机构的结构示意图;
28.图7是本实用新型一种导电片的焊接夹具中气源控制系统的结构示意图;
29.图8是本实用新型中导电片成品的结构示意图。
具体实施方式
30.以下结合附图1至8给出的实施例,进一步说明本实用新型的一种导电片的焊接夹具的具体实施方式。本实用新型的一种导电片的焊接夹具不限于以下实施例的描述。
31.如图8所示,本实施例焊接的导电片成品9包括第一导电片91和第二导电片92,本实施例的导电片的焊接夹具用于将第一导电片91和第二导电片92焊接在一起,所述第一导电片91成水平设置,后续用于与外部导线联接,在第一导电片91的一个侧边设有与第二导电片92焊接的缺口,第二导电片92弯折设置在第一导电片91的一侧,一端弯折与第一导电片91的缺口配合,另一端向远离第一导电片91的方向弯折,用于与导电系统联接。
32.本实施例的一种导电片的焊接夹具,包括定位机构、焊接机构2、运动组件4、出料机构8以及控制驱动机构,控制驱动机构分别与焊接机构2和运动组件4连接,所述运动组件4包括第一直线运动机构和与第一直线运动机构连接的第一夹持机构,第一夹持机构包括可以被驱动夹紧或打开的夹爪541,第一直线运动机构用于驱动夹爪541在固定组件3和出料机构8之间直线往复运动,所述定位机构包括固定组件3和第一夹持机构的夹爪541,焊接时,固定组件3定位第一导电片91与第二导电片92,且第一夹持机构驱动夹爪541夹紧固定第二导电片92,焊接机构2用于将第一导电片91与第二导电片92焊接为导电片成品9,在焊接完毕后由运动组件4通过夹爪541将导电片成品9带离固定组件3并移动到出料机构8。
33.本实用新型的焊接机构2以及运动组件4分别受控于控制驱动机构,在第一导电片91与第二导电片92进行焊接时,由定位机构的固定组件3与夹爪541相互配合夹紧定位第二导电片92,并在完成后将导电片成品9带离固定组件3移动到出料机构8,相比人工夹持焊接,固定组件3与夹爪541具备状态稳定的优点,利于保证成品9的状态统一性以及提高合格率,并且夹爪541直接将导电片成品9移动到出料机构8,提高了焊接节奏和效率。
34.结合图1-8提供一种具体的实施例,所述导电片的焊接夹具,包括底板1、焊接机构2、定位机构、控制驱动机构以及出料机构8,其中焊接机构2由控制驱动机构控制,并通过与定位机构的配合,先将第一导电片91与第二导电片92焊接在一起形成导电片成品9,随后,由出料机构8与控制驱动机构配合完成卸料。
35.如图1、2和7所示,在本实施例中,运动组件4与焊接机构2分别承载于底板1的相对两端,运动组件4包括第一直线运动机构以及与第一直线运动机构连接的第一夹持机构,第一夹持件包括夹爪541;在焊接机构2与夹爪541之间设置出料机构8(参见图3、4),所述运动组件4还包括滑动块44和线性滑轨45,线性滑轨45设置在固定组件3和运动组件4之间,滑动块44与线性滑轨45滑动配合且与第一直线运动机构连接,第一夹持机构设置在滑动块44上,所述出料机构8设置在线性滑轨45的一侧,其包括第二直线移动机构和下料板81,第二直线移动机构驱动下料板81伸入或移出与夹爪541相对的线性滑轨45上方,第一直线运动机构通过滑动块44和线性滑轨45的配合,第一夹持机构安装在滑动块44上,保证移动的稳定性,出料机构8通过移动的下料板81避让滑动块44和下料,保证夹具整体结构的紧凑。
36.所述控制驱动机构包括气源控制系统,气源控制系统包括可以编程的plc 51,由plc 51分别控制运动组件4的第一直线运动机构、第一夹持机构,由第一直线运动机构带动第一夹持机构的夹爪541在固定组件3与出料机构8之间进行直线往复运动,第一夹持机构的夹爪541在plc 51的控制下夹紧或打开;定位机构包括配合固定在焊接机构2的一侧的固定组件3和夹爪541,出料机构8优选设置在固定组件3与第一直线运动机构之间,出料机构8
包括位于底座31与夹爪541之间的下料板81以及由plc 51控制的第二直线移动机构,在第一导电片91与第二导电片92被焊接为导电片成品9时,固定组件3定位第一导电片91和第二导电片92,plc 51驱动第一直线运动机构带动第一夹持机构向靠近固定组件3的方向进行直线运动,当夹爪541靠近固定组件3时,plc 51控制第一夹持机构的夹爪541夹紧第二导电片92后启动焊接机构2工作,在焊接完毕后,plc 51驱动第一直线运动机构带动第一夹持件向远离固定组件3的方向进行直线运动,从而使夹爪541通过夹紧第二导电片92将导电片成品9带离固定组件3,由plc 51驱动第二直线移动机构使下料板81伸至底板1的上方,当导电片成品9位于下料板81的上方时,plc 51驱动夹爪541打开,导电片成品9落入下料板81后,沿下料板81的斜面滑动以完成卸料,优选的,第三气缸83沿直线进行往复运动,且第三气缸83的直线运动轨迹与夹爪541的直线运动轨迹相垂直。在本实施例中,第一直线运动机构包括第一气缸41,第一夹持机构包括第二气缸42,第二气缸42面向焊接机构的一侧设有夹爪541,第二直线移动机构包括第三气缸83。
37.如图2、6所示,所述焊接机构2设置于底板1的左端,固定组件3配合设置在焊接机构2的一侧,焊接机构2包括相对设置的第一电极21和第二电极22,所述第二电极22位于第一电极21上方且能够相对固定组件3上下移动,第一电极21、第二电极22分别固定于专用设备上。
38.如图1、2所述,所述固定组件3包括底座31、第一导电片定位件和第二导电片支撑件,所述底座31固定于焊接机构2的一侧,图2中将底座31固定于焊接机构2的第一电极21背对夹爪541的一侧,第一导电片定位件包括x向定位块32和y向定位块33,y向定位块33固定于底座31用于在y方向定位第一导电片91,x向定位块32固定于y向定位块33面向焊接机构2的一侧,在x向定位块32设有用于定位第一导电片91的定位槽,当然第一导电片定位件也可以是一个整体,在第一导电片定位件上设置定位槽;第二导电片支撑件固定于面向夹爪541的一侧以承载第二导电片92,使第一导电片91与第二导电片92临时搭接在一起,在本实施例中,第二导电片支撑件包括支撑块34和支撑杆35,所述支撑块34固定于底座31面向夹爪541的一侧,支撑杆35固定在支撑块34上,支撑杆35的中部对应于定位槽,由支撑杆35承载第二导电片92。
39.如图2-5、7所示,所述控制驱动机构的气源控制系统包括plc 51、电磁阀52、第一磁性开关53、第二磁性开关54和第三磁性开关84,plc 51控制焊接机构2工作并通过电磁阀52控制第一气缸41沿进行直线往复运动,由第一磁性开关53向plc 51反馈第一气缸41的位置信号,第二气缸42由第一气缸41驱动进行直线往复运动,第二气缸42的夹爪541由plc 51通过电磁阀52控制夹紧或打开,第二磁性开关54向plc 51反馈信号以表示夹爪541的状态,图3中第一磁性开关53、第二磁性开关54设置于第一气缸41上,第二磁性开关54根据第一气缸41的位置反馈夹爪541是否处于夹紧并悬空的状态。plc 51通过电磁阀52控制第三气缸83,使出料机构8完成出料,由第三磁性开关84反馈第三气缸83所处位置。
40.运动组件4包括固定块43、第一气缸41、第二气缸42、滑动块44和线性滑轨45,所述第一气缸41通过固定块43固定于底板1远离焊接机构2的一端,线性滑轨45固定于固定块43与焊接机构2之间的底板1,在第一气缸41的驱动下,滑动块44与线性滑轨45配合在固定组件3与固定块43之间进行直线往复运动,第二气缸42固定于滑动块44并使夹爪541朝向固定组件3,第二气缸42通过滑动块44进行靠近焊接机构2或远离焊接机构2的往复运动。
41.如图3、4所示,与控制驱动机构配合的出料机构8设置在夹爪541与固定组件3之间,出料机构8包括固定件82、第三气缸83、下料板81和第三磁性开关84,所述第三气缸83通过固定件82固定于底板1外的一侧,并由plc 51驱动进行直线往复运动,下料板81连接在第三气缸83的一端并在第三气缸83的驱动下可以对应的伸入或移出与夹爪541相对的底板1上方。当下料板81对应于夹爪541的下方时,落入下料板81的导电片成品9沿下料板81的斜面滑离下料板81以完成卸料,由第三磁性开关84向plc 51反馈第三气缸83的位置信号。
42.本实施例的焊接过程具体如下:
43.在第一导电片91的焊接处涂抹焊膏并放置在x向定位块32的定位槽中,随后将第二导电片92的一端配合放置在第一导电片91涂抹焊膏的位置,第二导电片92的另一端承载于支撑杆35上,向plc 51提供启动信号,由plc 51控制电磁阀52以驱动第一气缸41,此时第一气缸41处于置位状态,向靠近固定组件3的方向进行直线运动并通过滑动块44驱动夹爪541运动至与固定组件3配合的位置,并触发第一磁性开关53,第一磁性开关53向plc 51反馈第一气缸41的位置信号,随后plc 51通过控制电磁阀52驱动第二气缸42使夹爪541夹紧第二导电片92。在plc 51驱动焊接机构2将第一导电片91、第二导电片92焊接为导电片成品9后,plc 51控制电磁阀52驱动第一气缸41向远离固定组件3的方向进行直线运动,并处于复位状态,此时触发第二磁性开关54,第二磁性开关54向plc 51反馈位置信号,随后,plc 51通过电磁阀52驱动第三气缸83进行直线运动,使下料板81伸入底板1上方并对应夹爪541的下方,第三磁性开关84根据第三气缸83的位置向plc 51反馈第三气缸83处于置位状态,随后plc 51通过电磁阀52驱动第二气缸42打开夹爪541,使导电片成品9落入下料板81内,导电片成品9沿下料板81的斜面滑动离开下料板81完成卸料,最后由plc 51控制电磁阀52使第三气缸83复位,下料板81移出与夹爪541相对的位置。
44.优选的,所述气源控制系统还包括安全预防系统,所述安全预防系统设置在底板1上,由安全预防系统为运动组件4提供缓冲保护以及为操作人员提供安全防护。
45.如图1、5所示,所述安全预防系统包括缓冲装置6和感光保护装置7,所述缓冲装置6位于固定组件3与第一直线运动机构之间,且缓冲装置6更为靠近固定组件3,缓冲装置6为运动组件4的滑动块44提供缓冲作用;所述感光保护装置7设置在缓冲装置6与控制驱动机构的固定块43之间,感光保护装置7包括感光传感器73,感光保护装7的感光传感器73监测将第一导电片91与第二导电片92装入固定组件3的操作区域,在通电状态下,当感光保护装置7被遮挡时,感光保护装置7向控制驱动机构的plc 51反馈信号,使运动组件4以及焊接机构2停止工作。如图1所示,操作工作人员在靠近固定组件3和感光保护装置7的感光传感器73的一侧工作,感光传感器73监测朝向固定组件3一侧的操作区域,当操作工作人员将第一导电片91与第二导电片92装入固定组件3时,遮挡感光传感器73的,则使运动组件4以及焊接机构2停止工作。
46.所述缓冲装置6包括挡块61和油压缓冲器63,图5中挡块61包括一体成型的横臂和竖臂,所述横臂与竖臂的一端连接形成倒l形,横臂横跨底板1的上方,油压缓冲器63通过螺栓64固定于横臂背对焊接机构2的一侧,也就是油压缓冲器63位于横臂面向滑动块44的一侧,竖臂的另一端与底板1固定连接,优选在竖臂的至少一侧设有与底板1配合连接的加强筋62,以增强缓冲装置6与底板1的连接稳定性。在运动组件4的滑动块44与油压缓冲器63相撞时,油压缓冲器63为滑动块44提供缓冲作用,防止运动组件4产生多余晃动而影响夹爪
541与固定组件3的夹紧定位稳定性。
47.所述感光保护装置7包括防护板71、定位片72和感光传感器73,所述防护板71与底板1固定连接并遮盖滑动块44的运动空间,图1、5中防护板71与缓冲装置6分别设置在底板1的两侧,防护板71的下侧与底板1固定连接并位于缓冲装置6的右侧,防护板71的上侧弯折将底板1的一侧以及上侧遮盖起来,用于遮盖滑动块44的运动区域,在防护板71靠近底板1以及缓冲装置6的区域留有缺口,所述缺口与出料机构8的下料板81相对,使导电片成品9通过缺口滑出下料板81,以保证卸料的顺利完成;所述感光传感器73通过定位片72固定于防护板71的一侧,感光传感器73与plc 51连接反馈信号,当有障碍物遮挡感光传感器73时,plc 51根据感光传感器73所反馈的信号控制焊接机构2以及运动组件4停止工作,优选防护板71采用透明的亚克力材料制成,如此定位片72以及感光传感器73可以位于防护板71与滑动块44之间被防护板71保护起来,感光传感器73可以采用光电传感器73或光栅传感器73。
48.另外,气源控制系统还包括电控箱55,plc 51装配在电控箱55内,并通过在电控箱55内配置漏电断路器56、小型继电器57和开关电源58用于保证气源控制系统可靠运行,电磁阀52通过电磁阀底座521装配与电控箱55的一侧侧壁,在与电磁阀52相对的电控箱55侧壁还装配有气源三联件59,在气源三联件59与电磁阀52之间的管道上设置有滑动开关591。
49.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1