一种锅柄焊机的制作方法
1.本实用新型涉及机械加工领域,特别涉及一种锅柄焊机。
背景技术:
2.现有的锅柄焊机需要先人工将锅柄的组成部分先组合在一起,然后再将组合好的锅柄放到夹具上进行焊接,如果锅柄的组成部分更多,需要将部分组件先组合焊接,然后再将剩余的部分进行焊接,这样的加工方式的加工时间就相对更长,且加工的效率相对较低,因此需要一种能够同时将多个锅柄组件加工成锅柄且加工效率高的锅柄焊机。
技术实现要素:
3.本实用新型的主要目的是提供一种能够同时将多个锅柄组件加工成锅柄且加工效率高的锅柄焊机。
4.本实用新型提出一种锅柄焊机,包括机架、激光焊接机构以及锅柄夹持装置;所述机架内侧设置有工作腔,所述激光焊接机构设置在所述工作腔内侧上,所述锅柄夹持装置设置在所述工作腔内的所述激光焊接机构前端,所述锅柄夹持装置包括夹持装置底座、夹持动力机构以及夹具;所述夹具设置在所述夹持装置底座上,锅柄设置在所述夹具上,能够通过所述夹持动力机构带动所述夹具转动,从而带动所述锅柄转动并在转动的过程中完成焊接。
5.优选地,所述锅柄夹持装置还包括转动轴;所述夹具包括分别用于夹持锅柄的前侧、中侧以及后侧的第一夹具、第二夹具以及第三夹具;所述夹持动力机构与所述转动轴连接,所述转动轴与所述第一夹具以及第三夹具连接,从而能够通过所述夹持动力机构带动所述转动轴转动,从而通过所述转动轴带动所述第一夹具以及所述第三夹具转动。
6.优选地,所述夹持装置底座包括第一底板、第一支撑座、第二支撑座以及第三支撑座;所述第一支撑座外侧上设置有第一皮带轮,所述第一皮带轮的输出轴穿过所述第一支撑座与所述第一夹具连接,所述第三支撑座外侧设置有第二皮带轮,所述第二皮带轮的输出轴穿过所述第三支撑座外侧与所述第三夹具连接;所述转动轴两端穿过所述第一支撑座以及第三支撑座并分别与第三皮带轮以及第四皮带轮连接,所述第三皮带轮通过皮带与所述第一皮带轮连接,所述第四皮带轮通过皮带与所述第二皮带轮连接。
7.优选地,所述第一夹具和所述第一皮带轮的输出轴之间还设置有一调节器,能够通过所述调节器调节所述第一夹具与所述第一支撑座之间的距离。
8.优选地,所述第三夹具包括第三夹具支撑座、第二气缸、推动轨道以及第三夹具本体,所述推动轨道以及所述第二气缸设置在所述第三夹具支撑座上,所述第三夹具本体设置在所述推动轨道上,能够通过所述第二气缸推动所述第三夹具本体在所述推动轨道上运动。
9.优选地,所述第二支撑座包括第二支撑座支架以及设置在所述第二支撑座支架上的第一气缸,所述第一气缸为一双头气缸,所述第二夹具包括两个第二夹具组件,两个所述
第二夹具组件分别与所述第一气缸的其中一个输出头连接。
10.优选地,所述转动轴上还设置有与传动轴固定连接的第五皮带轮,所述夹持动力机构包括第二底板、夹持电机以及第六皮带轮;所述夹持电机设置在所述第二底板上与所述第二底板连接,所述第二底板的输出轴与所述第六皮带轮连接,所述第六皮带轮通过皮带与所述第五皮带轮连接。
11.优选地,所述激光焊接机构包括激光焊接机构支架以及激光焊接机构本体;所述激光焊接机构支架包括x轴运动机构、y轴运动机构以及z轴运动机构;所述y轴运动机构设置在所述x轴运动机构上,所述z轴运动机构设置在所述y轴运动机构上,所述激光焊接机构本体设置在所述z轴运动机构上。
12.优选地,所述机架顶部设置有排气风扇。
13.优选地,所述机架前侧设置有显示屏以及控制按键;通过所述控制按键控制所述激光焊接机构以及所述锅柄夹持装置工作,通过所述显示屏显示锅柄焊机的工作情况。
14.本实用新型的锅柄焊机的有益效果为:
15.1、通过设置锅柄夹持机构能够同时将多个锅柄组件加工成锅柄并且加工效率高。
16.2、相较于传统的加工方式减少了生产步骤,从而能够降低成本。
附图说明
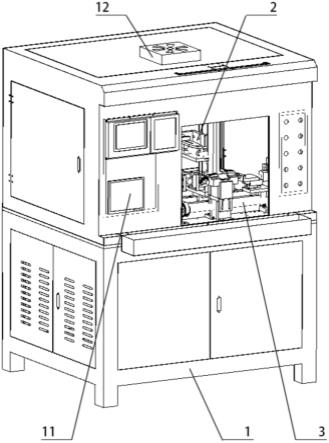
17.图1为本实用新型的锅柄焊机的结构示意图;
18.图2为本实用新型的锅柄焊机的激光焊接机构的结构示意图;
19.图3为本实用新型的锅柄焊机的锅柄夹持装置的结构示意图;
20.图4为本实用新型的锅柄焊机的第二支撑座的结构示意图;
21.图中标号:1、机架,2、激光焊接机构,3、锅柄夹持装置,11、显示屏,12、排气风扇,21、x轴运动机构,22、y轴运动机构,23、z轴运动机构,24、激光焊接机构本体,31、夹持装置底座,32、夹持动力机构,33、转动轴,34、第一夹具,35、第二夹具,36、第三夹具,37、调节器,311、第一底板,312、第一支撑座,313、第二支撑座,314、第三支撑座,315、第一皮带轮,316、第二皮带轮,321、第二底板,322、夹持电机,323、第六皮带轮,331、第三皮带轮,332、第四皮带轮,333、第五皮带轮,361、第三夹具支撑座,362、第二气缸,363、推动轨道,364、第三夹具本体,3131、第二支撑座支架,3132、第一气缸。
22.本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
23.应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
24.参照图1至图4,提出本实用新型的锅柄焊机的一实施例:
25.一种锅柄焊机,包括机架1、激光焊接机构2以及锅柄夹持装置3。
26.机架1内侧分割为工作腔以及电源腔,供电系统设置在电源腔内、激光焊接机构2以及锅柄夹持装置3设置在工作腔内。机架1顶部设置有排气风扇12,机架1前侧设置有显示屏11以及控制按键;通过控制按键控制激光焊接机构2以及锅柄夹持装置3工作,通过显示屏11显示锅柄焊机的工作情况。
27.锅柄夹持装置3包括转动轴33、夹持装置底座31、夹持动力机构32以及夹具。
28.夹具包括分别用于夹持锅柄的前侧、中侧以及后侧的第一夹具34、第二夹具35以及第三夹具36。第二夹具35包括从中间对半分开的两个第二夹具组件。第三夹具36包括第三夹具支撑座361、第二气缸362、推动轨道363以及第三夹具本体364、推动轨道363以及第二气缸362设置在第三夹具支撑座361上,第三夹具本体364设置在推动轨道363上,能够通过第二气缸362推动第三夹具本体364在推动轨道363上运动。
29.夹持装置底座31包括第一底板311、第一支撑座312、第二支撑座313以及第三支撑座314;第一支撑座312外侧上设置有第一皮带轮315,第一皮带轮315的输出轴穿过第一支撑座312与调节器117连接,然后通过调节器37与第一夹具34连接。能够通过调节器37调节第一夹具34和第一支撑座312之间的距离。第二支撑座313包括第二支撑座支架3131以及设置在第二支撑座支架3131上的第一气缸3132,第一气缸3132为一双头气缸,两个第二夹具组件分别与第一气缸3132的其中一个输出头连接。第三支撑座314外侧设置有第二皮带轮316,第二皮带轮316的输出轴穿过第三支撑座314外侧与第三夹具支撑座361连接;转动轴33两端穿过第一支撑座312以及第三支撑座314并分别与第三皮带轮331以及第四皮带轮332连接,第三皮带轮331通过皮带与第一皮带轮315连接,第四皮带轮332通过皮带与第二皮带轮316连接。第三皮带轮331和第四皮带轮332之间还设置有第五皮带轮333。
30.夹持动力机构32包括第二底板321、夹持电机322以及第六皮带轮323;夹持电机322设置在第二底板321上与第二底板321连接,第二底板321的输出轴与第六皮带轮323连接,第六皮带轮323通过皮带与第五皮带轮333连接。
31.激光焊接机构2包括激光焊接机构支架以及激光焊接机构本体24。激光焊接机构支架包括x轴运动机构21、y轴运动机构22以及z轴运动机构23;x轴运动机构21包括设置在工作腔内侧底部的两条x轴轨道、设置在其中一条x轴轨道一端上的x轴驱动电机以及设置在两条x轴轨道上的x轴运动座。y轴运动机构22包括设置在x轴运动座上的两条y轴轨道、设置在其中一条y轴轨道一端上的y轴驱动电机以及设置在两条y轴轨道上的y轴运动座。z轴运动机构23包括设置在y轴运动座上的两条z轴轨道、设置在其中一条z轴轨道一端上的z轴驱动电机以及设置在两条z轴轨道上的z轴运动座。激光焊接机构本体24设置在z轴运动座上。通过x轴运动机构21、y轴运动机构22以及z轴运动机构23能够带动激光焊接机构本体24在x轴、y轴以及z轴上运动。
32.使用的时候,用户分别将锅柄的三个部分分别放入第一夹具34、第二夹具35以及第三夹具36内,其中第二夹具35在第一气缸3132的带动下展开部分来方便产品的放入,然后用户通过控制按键先通过第一气缸3132将第二夹具35内的产品夹紧,然后通过第二气缸362将第一夹具34、第二夹具35以及第三夹具36内的产品组合,然后激光焊接机构2先将三者的连接部分稍微的焊接一下,使得三者部分连接,然后第一气缸3132使得第二夹具35展开来避免影响产品的转动,然后夹持动力机构32工作,并通过层层传动来带动锅柄旋转,并在旋转的同时进行焊接。从而最终完成焊接的工作。
33.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1