一种自动化气动元件加工用冲压设备的制作方法
1.本实用新型涉及冲压设备技术领域,更具体地说,涉及一种自动化气动元件加工用冲压设备。
背景技术:
2.冲压,是靠压力机和模具对板材、带材、管材和型材等施加外力,使之产生塑性变形或分离,从而获得所需形状和尺寸的工件冲压件)的成形加工方法,冲压件与铸件、锻件相比,具有薄、匀、轻、强的特点,冲压可制出其他方法难于制造的带有加强筋、肋、起伏或翻边的工件,以提高其刚性。
3.以往气动元件用冲压设备存在一定问题,传统的机械加工用的冲压设备在利用液压缸提供动力时,液压容易受温度的影响,液压器件在实际使用中的可靠性并不高,使得液压锁定的方式可靠性不高,降低了安全性且对使用人员存在一定安全隐患,且需要因工序改变而更换模具时不便于对模具的拆装,因此本领域的专业人员提供了一种自动化气动元件加工用冲压设备,已解决上述提到的问题。
技术实现要素:
4.针对现有技术中存在的问题,本实用新型的目的在于提供一种自动化气动元件加工用冲压设备,以解决以往气动元件用冲压设备不具有防护功能与不便于拆装的问题。
5.为解决上述问题,本实用新型采用如下的技术方案。
6.一种自动化气动元件加工用冲压设备,包括工作台,所述工作台的顶部设置有定位装置,所述工作台的顶部设置有冲压模,所述冲压模的底部与定位装置相接触,所述工作台的顶部固定连接有安装架,所述安装架的顶部固定安装有液压推杆,所述液压推杆的底端贯穿并延伸至安装架的内部,所述液压推杆的底端固定连接有浮动板,所述浮动板的底部固定连接有冲压头,所述冲压头位于冲压模的顶部,所述浮动板上设置有防护装置。
7.作为上述技术方案的进一步描述:所述安装架的右侧固定安装有控制面板,所述定位装置与液压推杆均与控制面板之间电性连接。
8.作为上述技术方案的进一步描述:所述定位装置包含有置物座,所述置物座固定连接在工作台的顶部,所述冲压模位于置物座的顶部,所述工作台的底部固定安装有气泵,所述气泵的顶端贯穿并延伸至置物座的内部,所述置物座的内顶壁上固定连接有均匀分布的吸盘,所述吸盘的顶端均贯穿并延伸至置物座的顶部,所述安装架的左侧固定安装有伺服电机,所述伺服电机的输出轴贯穿并延伸至安装架的内部,所述伺服电机的输出轴上固定连接有驱动轴,所述驱动轴上螺纹连接有两个定位板,两个所述定位板分别位于冲压模的左右两侧,所述气泵与伺服电机均与控制面板之间电性连接。
9.作为上述技术方案的进一步描述:两个所述定位板相对的一侧均固定连接有橡胶垫,两个所述橡胶垫均与冲压模接触。
10.作为上述技术方案的进一步描述:所述安装架的左侧壁上固定连接有定位杆,所
述定位杆的右端贯穿两个定位板并固定连接在安装架的右侧壁上。
11.作为上述技术方案的进一步描述:所述防护装置包含有两个通槽,两个所述通槽分别开设在安装架的左右两侧,所述浮动板的左右两侧均固定连接有安装板,两个所述安装板分别位于通槽的内部,两个所述通槽的内壁上均开设有两个安装槽,四个所述安装槽的内壁上均铰接有挡板,四个所述安装槽的内壁上均固定连接有电磁块,四个所述电磁块分别与四个挡板相对应,所述浮动板的顶部固定安装有速度传感器、中央处理器与两个和红外传感器,两个所述红外传感器的底端均贯穿并延伸至浮动板的底部,所述电磁块、速度传感器与红外传感器均与中央处理器之间电性连接。
12.相比于现有技术,本实用新型的优点在于:
13.(1)本方案,当需要使用此冲压设备对气动元件进程冲压时,首先使用人员先设定好液压推杆的冲压速度,当需要将冲压模固定在定位装置上时,使用人员将冲压模放置在定位装置顶部,接着控制定位装置通电工作,定位装置通电后先将冲压模推至中心随后产生吸力将冲压模吸附在顶部,此时冲压模便完成了安装,当需要将冲压模取下进行更换或检修时,使用人员控制定位装置与冲压模分离,此时便可以将冲压模取下,定位装置的设置可以加快对冲压模的拆装速度,从而提高加工效率,接着使用人员将气动元件放置在冲压模内部,随后控制液压推杆通电工作,液压推杆带动浮动板与冲压头同步下移,对气动元件进行冲压,当防护装置感测到浮动板的下移速度高于设定值时便会开始工作,当快速下移的浮动板接触到防护装置后便会停止下移,随后使用人员便可以对其进行检修,若在浮动板下移过程中检测到使用人员的手臂未离开防护装置同样会工作,原理同上在此不过多赘述,防护装置的设置可以避免冲压速度过快造成装置损坏,也可以避免对使用人员造成伤害,解决了以往气动元件冲压设备不具有防护功能与不便于拆装的问题。
14.(2)本方案,控制面板的设置可以使得使用人员更加简单快捷的操控此装置,以此减少人员的投入与所需要操作的步骤,从而提高对气动元件的冲压效率。
15.(3)本方案,当需要将冲压模固定在定位装置上时,使用人员将冲压模放置在置物座顶部,接着控制伺服电机通电工作,伺服电机通电后带动与其固定连接的驱动轴同步转动,与驱动轴螺纹连接的两个定位板开始朝着相对的一侧移动直至将冲压模定位到置物座中心位置,此时控制伺服电机停止工作,接着控制气泵通电工作,气泵通电后产生吸力将置物座内部的空气抽出,随着置物座内部空气逐渐减少开始形成负压,这就使得吸盘开始产生吸力,吸盘将冲压模吸附在置物座顶部,此时冲压模便完成了安装,当需要将冲压模取下进行更换或检修时,使用人员控制伺服电机与气泵反向工作,伺服电机反向转动使得定位板与冲压模分离,气泵则向置物座内部充气使得吸盘失去吸力与冲压模分离,此时便可以将冲压模取下,定位装置的设置可以加快对冲压模的拆装速度,从而提高加工效率。
16.(4)本方案,当定位板朝着冲压模移动时,橡胶垫会先与冲压模接触,橡胶垫的设置可以增大定位板与冲压模之间的摩擦,同时还可以避免冲压模直接与定位板接触对其造成磨损。
17.(5)本方案,定位杆的设置可以对定位板起到限制作用,使得定位板只可以进行水平方向的移动,避免定位板随着驱动轴同步转动。
18.(6)本方案,当速度传感器感测到浮动板的下移速度高于设定值时便会将信号传递给中央处理器,中央处理器接收信号后控制电磁块失去磁力,与电磁块相吸引的挡板便
会失去限制受重力转动,挡板转动至安装槽外部,当快速下移的安装板接触到挡板后便会停止下移,随后使用人员便可以对其进行检修,在浮动板移动过程中红外传感器也会通电工作,红外传感器会浮动板底部进行监测,若在浮动板下移过程中监测到使用人员的手臂未离开,红外传感器便会将信号传递给中央处理器,中央处理器接收信号后同样控制电磁块失去磁力,原理同上在此不过多赘述,防护装置的设置可以避免冲压速度过快造成装置损坏,也可以避免对使用人员造成伤害。
附图说明
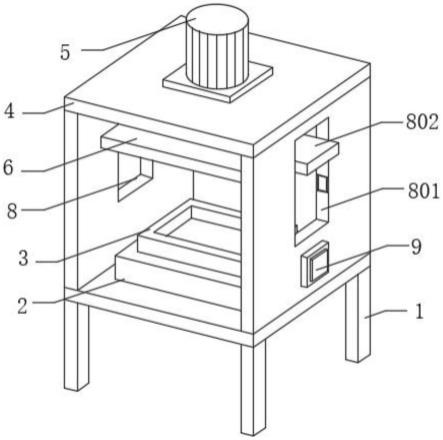
19.图1为本实用新型的立体结构示意图;
20.图2为本实用新型的正视剖面结构示意图;
21.图3为本实用新型的定位杆俯视结构示意图;
22.图4为本实用新型的安装槽立体结构示意图。
23.图中标号说明:
24.1、工作台;2、定位装置;201、置物座;202、气泵;203、吸盘;204、伺服电机;205、驱动轴;206、定位板;3、冲压模;4、安装架;5、液压推杆;6、浮动板;7、冲压头;8、防护装置;801、通槽;802、安装板;803、安装槽;804、挡板;805、电磁块;806、速度传感器;807、中央处理器;808、红外传感器;9、控制面板;10、橡胶垫;11、定位杆。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述;
26.请参阅图1~4,本实用新型中,一种自动化气动元件加工用冲压设备,包括工作台1,工作台1的顶部设置有定位装置2,工作台1的顶部设置有冲压模3,冲压模3的底部与定位装置2相接触,工作台1的顶部固定连接有安装架4,安装架4的顶部固定安装有液压推杆5,液压推杆5的底端贯穿并延伸至安装架4的内部,液压推杆5的底端固定连接有浮动板6,浮动板6的底部固定连接有冲压头7,冲压头7位于冲压模3的顶部,浮动板6上设置有防护装置8。
27.本实用新型中,当需要使用此冲压设备对气动元件进程冲压时,首先使用人员先设定好液压推杆5的冲压速度,当需要将冲压模3固定在定位装置2上时,使用人员将冲压模3放置在定位装置2顶部,接着控制定位装置2通电工作,定位装置2通电后先将冲压模3推至中心随后产生吸力将冲压模3吸附在顶部,此时冲压模3便完成了安装,当需要将冲压模3取下进行更换或检修时,使用人员控制定位装置2与冲压模3分离,此时便可以将冲压模3取下,定位装置2的设置可以加快对冲压模3的拆装速度,从而提高加工效率,接着使用人员将气动元件放置在冲压模3内部,随后控制液压推杆5通电工作,液压推杆5带动浮动板6与冲压头7同步下移,对气动元件进行冲压,当防护装置8感测到浮动板6的下移速度高于设定值时便会开始工作,当快速下移的浮动板6接触到防护装置8后便会停止下移,随后使用人员便可以对其进行检修,若在浮动板6下移过程中检测到使用人员的手臂未离开防护装置8同样会工作,原理同上在此不过多赘述,防护装置8的设置可以避免冲压速度过快造成装置损坏,也可以避免对使用人员造成伤害,解决了以往气动元件冲压设备不具有防护功能与不
便于拆装的问题。
28.请参阅图1与2,其中:安装架4的右侧固定安装有控制面板9,定位装置2与液压推杆5均与控制面板9之间电性连接。
29.本实用新型中,控制面板9的设置可以使得使用人员更加简单快捷的操控此装置,以此减少人员的投入与所需要操作的步骤,从而提高对气动元件的冲压效率。
30.请参阅图1~3,其中:定位装置2包含有置物座201,置物座201固定连接在工作台1的顶部,冲压模3位于置物座201的顶部,工作台1的底部固定安装有气泵202,气泵202的顶端贯穿并延伸至置物座201的内部,置物座201的内顶壁上固定连接有均匀分布的吸盘203,吸盘203的顶端均贯穿并延伸至置物座201的顶部,安装架4的左侧固定安装有伺服电机204,伺服电机204的输出轴贯穿并延伸至安装架4的内部,伺服电机204的输出轴上固定连接有驱动轴205,驱动轴205上螺纹连接有两个定位板206,两个定位板206分别位于冲压模3的左右两侧,气泵202与伺服电机204均与控制面板9之间电性连接。
31.本实用新型中,当需要将冲压模3固定在定位装置2上时,使用人员将冲压模3放置在置物座201顶部,接着控制伺服电机204通电工作,伺服电机204通电后带动与其固定连接的驱动轴205同步转动,与驱动轴205螺纹连接的两个定位板206开始朝着相对的一侧移动直至将冲压模3定位到置物座201中心位置,此时控制伺服电机204停止工作,接着控制气泵202通电工作,气泵202通电后产生吸力将置物座201内部的空气抽出,随着置物座201内部空气逐渐减少开始形成负压,这就使得吸盘203开始产生吸力,吸盘203将冲压模3吸附在置物座201顶部,此时冲压模3便完成了安装,当需要将冲压模3取下进行更换或检修时,使用人员控制伺服电机204与气泵202反向工作,伺服电机204反向转动使得定位板206与冲压模3分离,气泵202则向置物座201内部充气使得吸盘203失去吸力与冲压模3分离,此时便可以将冲压模3取下,定位装置2的设置可以加快对冲压模3的拆装速度,从而提高加工效率。
32.请参阅图2与3,其中:两个定位板206相对的一侧均固定连接有橡胶垫10,两个橡胶垫10均与冲压模3接触。
33.本实用新型中,当定位板206朝着冲压模3移动时,橡胶垫10会先与冲压模3接触,橡胶垫10的设置可以增大定位板206与冲压模3之间的摩擦,同时还可以避免冲压模3直接与定位板206接触对其造成磨损。
34.请参阅图3,其中:安装架4的左侧壁上固定连接有定位杆11,定位杆11的右端贯穿两个定位板206并固定连接在安装架4的右侧壁上。
35.本实用新型中,定位杆11的设置可以对定位板206起到限制作用,使得定位板206只可以进行水平方向的移动,避免定位板206随着驱动轴205同步转动。
36.请参阅图1、2与4,其中:防护装置8包含有两个通槽801,两个通槽801分别开设在安装架4的左右两侧,浮动板6的左右两侧均固定连接有安装板802,两个安装板802分别位于通槽801的内部,两个通槽801的内壁上均开设有两个安装槽803,四个安装槽803的内壁上均铰接有挡板804,四个安装槽803的内壁上均固定连接有电磁块805,四个电磁块805分别与四个挡板804相对应,浮动板6的顶部固定安装有速度传感器806、中央处理器807与两个和红外传感器808,两个红外传感器808的底端均贯穿并延伸至浮动板6的底部,电磁块805、速度传感器806与红外传感器808均与中央处理器807之间电性连接。
37.本实用新型中,当速度传感器806感测到浮动板6的下移速度高于设定值时便会将
信号传递给中央处理器807,中央处理器807接收信号后控制电磁块805失去磁力,与电磁块805相吸引的挡板804便会失去限制受重力转动,挡板804转动至安装槽803外部,当快速下移的安装板802接触到挡板804后便会停止下移,随后使用人员便可以对其进行检修,在浮动板6移动过程中红外传感器808也会通电工作,红外传感器808会浮动板6底部进行监测,若在浮动板6下移过程中监测到使用人员的手臂未离开,红外传感器808便会将信号传递给中央处理器807,中央处理器807接收信号后同样控制电磁块805失去磁力,原理同上在此不过多赘述,防护装置8的设置可以避免冲压速度过快造成装置损坏,也可以避免对使用人员造成伤害。
38.本方案中,气泵202的型号可为jycqb-08;伺服电机204的型号可为110st-m04030;液压推杆5的型号可为dytp-3000。
39.工作原理:当需要使用此冲压设备对气动元件进程冲压时,首先使用人员先设定好液压推杆5的冲压速度,当需要将冲压模3固定在定位装置2上时,使用人员将冲压模3放置在置物座201顶部,接着控制伺服电机204通电工作,伺服电机204通电后带动与其固定连接的驱动轴205同步转动,与驱动轴205螺纹连接的两个定位板206开始朝着相对的一侧移动直至将冲压模3定位到置物座201中心位置,此时控制伺服电机204停止工作,接着控制气泵202通电工作,气泵202通电后产生吸力将置物座201内部的空气抽出,随着置物座201内部空气逐渐减少开始形成负压,这就使得吸盘203开始产生吸力,吸盘203将冲压模3吸附在置物座201顶部,此时冲压模3便完成了安装,当需要将冲压模3取下进行更换或检修时,使用人员控制伺服电机204与气泵202反向工作,伺服电机204反向转动使得定位板206与冲压模3分离,气泵202则向置物座201内部充气使得吸盘203失去吸力与冲压模3分离,此时便可以将冲压模3取下,定位装置2的设置可以加快对冲压模3的拆装速度,从而提高加工效率,接着使用人员将气动元件放置在冲压模3内部,随后控制液压推杆5通电工作,液压推杆5带动浮动板6与冲压头7同步下移,对气动元件进行冲压,当速度传感器806感测到浮动板6的下移速度高于设定值时便会将信号传递给中央处理器807,中央处理器807接收信号后控制电磁块805失去磁力,与电磁块805相吸引的挡板804便会失去限制受重力转动,挡板804转动至安装槽803外部,当快速下移的安装板802接触到挡板804后便会停止下移,随后使用人员便可以对其进行检修,在浮动板6移动过程中红外传感器808也会通电工作,红外传感器808会浮动板6底部进行监测,若在浮动板6下移过程中监测到使用人员的手臂未离开,红外传感器808便会将信号传递给中央处理器807,中央处理器807接收信号后同样控制电磁块805失去磁力,原理同上在此不过多赘述,防护装置8的设置可以避免冲压速度过快造成装置损坏,也可以避免对使用人员造成伤害,解决了以往气动元件冲压设备不具有防护功能与不便于拆装的问题。
40.以上所述,仅为本实用新型较佳的具体实施方式;但本实用新型的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其改进构思加以等同替换或改变,都应涵盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1