一种焊接机器人外置供油清枪站的制作方法
1.本实用新型涉及清枪站技术领域,尤其是一种焊接机器人外置供油清枪站。
背景技术:
2.焊接机器人是从事焊接的工业机器人,工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊枪的,使之能进行焊接,切割或热喷涂;现有的焊接机器人用清枪站自动化程度低,清理效果差,同时其包含的喷油装置导致油雾污染的问题较为严重;因此,现有必要提出一种焊接机器人用清枪站解决上述问题。
技术实现要素:
3.本技术针对上述现有生产技术中的缺点,提供一种结构合理的焊接机器人外置供油清枪站,从而能够实现清枪、外置供油、剪丝三种功能,实现三位一体的自动化工作清枪站。
4.本实用新型所采用的技术方案如下:
5.一种焊接机器人外置供油清枪站,包括底座,所述底座的上方设置气源箱,所述气源箱的前端面固设夹枪装置,还包括:
6.清枪装置,所述清枪装置设置在夹枪装置的工作中心下方;
7.剪丝装置,所述剪丝装置设置在夹枪装置的前部;
8.喷油装置,所述喷油装置设置在气源箱的侧端面;所述喷油装置包括固设在气源箱外壁的油瓶支架,所述油瓶支架内并列设置供油瓶以及回油瓶,所述油瓶支架的顶部设置喷油箱,所述喷邮箱的内部为封闭空间,所述喷油箱的中心处设置喷油嘴,所述喷油箱的底部设置回油口,所述回油口通过连接管与回油瓶连接,所述喷油嘴通过连接管与供油瓶连接。
9.进一步的,所述夹枪装置包括一个夹具座,所述夹具座的一侧设置第一气缸,所述夹具座的另一侧设置固定挡铁。
10.进一步的,所述清枪装置包括固设在气源箱前端面下部的调节架,所述调节架内垂直安装气动马达,所述气动马达的驱动端安装铰刀。
11.进一步的,所述清枪装置还包括固设在气动马达下方的收集盒。
12.进一步的,所述剪丝装置包括固设在夹枪装置前端面的固定板,所述固定板的前端面固设安装板,所述安装板的一侧设置剪丝机构,所述剪丝机构的外周设置防护壳。
13.进一步的,所述气源箱使用的压缩空气气源为6bar的无油干燥压缩空气。
14.进一步的,所述气源箱的下部通过设置气源接头,所述气源接头为螺母连接件。
15.进一步的,所述气源箱的下部还设置与外接机器人控制连接的控制接头,所述控制接头为七针航空母座。
16.本实用新型的有益效果如下:
17.1.本实用新型通过将喷油装置、剪丝装置、清枪装置集成于一体,通过七针航空母座与机器人实现电连接,由机器人发出控制信号,能够自动化完成清枪、剪丝、喷油三个工序,功能完备能够满足现有市场机器人清枪的需求;
18.2.本实用新型的喷油装置安装在清枪站本体的外部,能够满足机器人焊枪频繁的喷油需求,同时该喷油装置配备回油功能,能够实现油液的回收,环保清洁,同时相对封闭的喷油仓大大减轻了现有技术中的油雾污染的问题。
附图说明
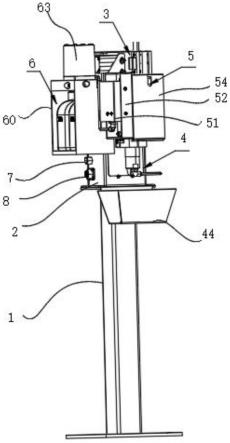
19.图1为本实用新型的立体示意图;
20.图2为图1的正视图;
21.图3为图1的右视图;
22.图4为本实用新型中喷油装置及喷油箱的内部结构图。
23.其中:1、底座;2、气源箱;3、夹枪装置;4、清枪装置;5、剪丝装置;6、喷油装置;60、油瓶支架;61、供油瓶;62、回油瓶;63、喷油箱;64、喷油嘴;65、回油口;31、夹具座;32、第一气缸;33、固定挡铁;41、调节架;42、气动马达;43、铰刀;44、收集盒;51、固定板;52、安装板;54、防护壳;7、气源接头;8、控制接头。
具体实施方式
24.下面结合附图,说明本实用新型的具体实施方式。
25.如图1、图2、图3和图4所示的实施例中,一种焊接机器人外置供油清枪站,包括底座1,底座1的上方设置气源箱2,气源箱2的前端面固设夹枪装置3,还包括:
26.清枪装置4设置在夹枪装置3的工作中心下方;
27.剪丝装置5设置在夹枪装置3的前部;
28.喷油装置6设置在气源箱2的侧端面;喷油装置6包括固设在气源箱2外壁的油瓶支架60,油瓶支架60内并列设置供油瓶61以及回油瓶62,油瓶支架60的顶部设置喷油箱63,喷邮箱的内部为封闭空间,喷油箱63的中心处设置喷油嘴64,喷油箱63的底部设置回油口65,回油口65通过连接管与回油瓶62连接,喷油嘴64通过连接管与供油瓶61连接。
29.如图1、图2、图3和图4所示的实施例中,夹枪装置3包括一个夹具座31,所述夹具座31的一侧设置第一气缸32,夹具座31的另一侧设置固定挡铁33。
30.如图1、图2、图3和图4所示的实施例中,清枪装置4包括固设在气源箱2前端面下部的调节架41,调节架41内垂直安装气动马达42,气动马达42的驱动端安装铰刀43。
31.如图1、图2、图3和图4所示的实施例中,清枪装置4还包括固设在气动马达42下方的收集盒44,用于对焊丝的收集回收。
32.如图1、图2、图3和图4所示的实施例中,剪丝装置5包括固设在夹枪装置3前端面的固定板51,固定板51的前端面固设安装板52,安装板52的一侧设置剪丝机构,剪丝机构的外周设置防护壳54。
33.如图1、图2、图3和图4所示的实施例中,气源箱2使用的压缩空气气源为6bar的无油干燥压缩空气,在本实施例中选用该参数的压缩空气气源能够保证各装置间可靠、稳定
的气动驱动输入。
34.如图1、图2、图3和图4所示的实施例中,气源箱2的下部通过设置气源接头7,气源接头7优选设置为螺母连接件,进而方便气源箱2气源的补充和连接。
35.如图1、图2、图3和图4所示的实施例中,气源箱2的下部还设置与外接机器人控制连接的控制接头8,控制头优选设置为七针航空母座,进而实现外部焊接机器人与清枪站的控制连接。
36.本实用新型的工作原理:
37.自动清枪站专为配有自动焊接系统的机器人焊枪及自动焊枪设计,清枪站的喷油装置6、剪丝装置5、清枪装置4、夹枪装置3均配备传感器以及电磁阀,清枪站通过控制接头8与机器人电连接,清枪站也会将相应的反馈信号提供给机器人;本实用新型在工作时有专业工作人员安装调试到位,机器人发出控制信号将配有焊枪的机械臂运送到达夹枪位置,控制端驱动第一气缸32工作,夹枪装置3将垂直放置的焊枪夹紧固定,控制端驱动气动马达42,通过高速旋转的铰刀43实现清枪,清枪时可至导电嘴座根部清枪效果彻底;在其他实施例中,铰刀43的选用还能够配备不同型号的多功能铰刀43来满足不同的需求;在清枪完成后,夹枪装置3松开焊枪,焊枪上移一个工位后向前端面移动剪丝装置5部进行剪丝,本实用新型的剪丝装置5,将清枪剪丝机构重要元器件通过高质量的防护科保护,免受碰撞飞溅及灰尘影响;剪丝装置5采用电磁阀控制,剪丝更加准确;确保剪掉的焊丝落如收集盒44中进行回收处理;剪丝完成后,控制端控制机械臂移动工位至喷油装置6,喷油嘴64的底部通过软管连接气源箱2由控制端控制,焊枪到位后,喷油嘴64从供油瓶61内汲取油液进行喷油,溢出、逸散的油液雾气集中在密闭的喷油箱63内,喷油完成后,沉积在底部的油液通过回油口65流入回油瓶62完成油液的回收;本实用新型通过将喷油装置6、剪丝装置5、清枪装置4集成于一体,通过七针航空母座与机器人实现电连接,由机器人发出控制信号,能够自动化完成清枪、剪丝、喷油三个工序,功能完备能够满足现有市场机器人清枪的需求;本实用新型的喷油装置6安装在清枪站本体的外部,能够满足机器人焊枪频繁的喷油需求,同时该喷油装置6配备回油功能,能够实现油液的回收,环保清洁,同时相对封闭的喷油仓大大减轻了现有技术中的油雾污染的问题。
38.以上描述是对本实用新型的解释,不是对实用新型的限定,本实用新型所限定的范围参见权利要求,在本实用新型的保护范围之内,可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1